

1. 서 론
2. 실대형 굴진시험을 통한 디스크커터 측정데이터 분석
2.1 디스크커터 마모측정 기술
2.2 실대형 굴진시험 수행
2.3 마모상태에 따른 측정데이터 특성 분석
3. 딥러닝을 활용한 디스크커터 편마모 판단 알고리즘 개발
3.1 합성곱신경망(Convolutional Neural Network, CNN) 모델
3.2 자기센서 데이터를 바탕으로 한 2D-CNN 편마모 판단 알고리즘 개발
3.3 홀센서 데이터를 바탕으로 한 1D-CNN 편마모 판단 알고리즘 개발
4. 결 론
1. 서 론
전력구 터널은 전력공급을 위한 송전선로를 지중에 건설하는 지중화사업의 한 종류이다. 최근에는 국민 수용성 제고를 위해 관로 및 전력구와 같은 지중 송전선로의 건설물량이 급증하고 있는 추세이며, 2022년에는 가공송전 대비 지중화 비율이 14%에서 최대 61%까지 증가하였다. 국내 전력구 터널 공사는 주로 쉴드TBM (Tunnel Boring Machine) 공법으로 시공되며, 쉴드TBM의 효율적인 운용에 따라 공사의 성패가 좌우된다고 할 수 있다.
쉴드TBM의 구성요소 중 디스크커터(Disc cutter)는 암반을 파쇄하는 중요한 역할을 수행한다. 암반을 파쇄하는 과정에서 지속적인 마모와 파손이 발생하여 통상적으로 굴착거리 약 100~200 m 정도 마다 교체를 수행해야 한다. 쉴드TBM의 계획된 굴진속도(Advance rate) 달성과 공사지연을 야기시키는 다운타임(Downtime)을 최소화하기 위해서는 마모된 디스크커터의 효율적인 교체와 이상유무를 빠르게 판단하여 조치하는 것이 필수적이다. 이에 선행 연구들(Rostami and Ozdemir, 1993; Gehring, 1995; Bruland, 2000)에서는 경험적인 모델을 바탕으로 디스크커터의 수명을 예측하고자 하였으며, 이러한 방법들은 실내에서 암석시편과 디스크커터 공구강의 재료를 바탕으로 다양한 실내실험을 통해 설계단계에서 활용할 수 있다. 최근에는 머신러닝(Machine Learning) 기법을 도입하여 쉴드TBM의 굴진데이터를 통해 디스크커터 마모 및 교체주기 예측을 위한 연구들이 수행되고 있으며, 이들은 설계단계 뿐만 아니라 터널 공사 중에도 활용할 수 있는 장점이 있다. La et al. (2019)은 서포트 벡터 머신(Support Vector Machine) 기법을 활용하여 고속철도 터널 굴진데이터를 학습하고, 예측 신뢰도를 평가하였다. Kim et al. (2020b)은 서포트 벡터 머신, 최근접이웃(k-Nearest Neighbor, kNN), 의사결정트리(Decision Tree, DT) 모델을 활용하여 4가지 지반타입별 추력, 토크, 회전속도 등을 바탕으로 디스크커터의 교체 유무를 판단하였다. Kang et al. (2022)은 최근접이웃, 의사결정트리, 랜덤포레스트(Random Forest), 그레디언트 부스팅(Gradient Boosting Machine), XG부스팅(eXtreme Gradient Boosting), Light GBM (Light Gradient Boosting Machine), 다층 퍼셉트론(Multilayer Perceptron) 등의 기계학습 회귀 알고리즘을 적용하여 11개의 굴진 ‧ 지반데이터를 바탕으로 학습하여 마모량을 예측한 결과 최대 0.852의 결정계수와, 3.402의 평균제곱근오차를 확보하였다. 그 밖에도 Hong and Ko (2023)는 다중선형회귀분석과 트리 기반 머신러닝 기법을 적용하여 암석물성을 통해 커터수명지수(Cutter Life Index)를 예측하는 연구를 수행하였다.
디스크커터의 마모량 및 파단에 영향을 미칠 수 있는 조건은 크게 암반의 공학적 특성(암질지수, 일축압축강도, 절리간격, 암반등급 등)과 TBM의 운전특성과 디스크커터 재료적 특성으로 나뉠 수 있다. 국내 쉴드TBM의 경우는 굴착 중 암반의 특성 파악이 어렵기 때문에 설계단계에서 수행된 제한된 지반조사 결과만을 머신러닝 학습에 활용해야 하는 한계점이 있다. 이러한 한계점을 극복하고자 Kang and Ko (2024)는 TBM의 운전데이터를 바탕으로 머신러닝을 활용하여 일축압축강도를 추정하고, 이를 마모 예측에 활용하였다. 그러나 추력, 토크, 동력, 회전속도 등 쉴드TBM의 대표적인 운전특성은 TBM 커터헤드(Cutterhead) 전반에 작용하는 값으로 디스크커터 위치별(페이스 및 게이지) 특성을 반영하기에는 한계가 있다.
본 연구에서는 실시간으로 계측된 디스크커터의 마모량과 회전수를 기반으로 딥러닝 알고리즘을 통해 디스크커터의 마모상태를 판별하기 위한 연구를 수행하였다. 디스크커터의 각종 계측데이터 획득에는 선행연구(Ju et al., 2024; Kim et al., 2024)를 통해 개발된 디스크커터 마모측정 기술을 활용하였다. 실대형 굴진시험을 통해 디스크커터의 마모상태에 따른 마모량 회전수를 실시간으로 획득한 결과, 디스크커터의 상태에 데이터가 상이한 것을 확인하였다. 공사관계자가 측정된 센서정보를 상시 모니터링할 수 없기 때문에 머신러닝 기법 중 딥러닝 기법을 활용하여 편마모와 같은 디스크커터의 이상유무를 시스템이 판단할 수 있도록 알고리즘을 개발하였다. 본 연구를 통해 쉴드TBM 오퍼레이터와 터널 근로자의 경험에 의존한 디스크커터 수시점검의 한계를 극복하고, 디스크커터 점검 ‧ 교체로 인한 챔버 개방의 횟수를 최적화할 수 있을 것으로 기대하고 있다.
2. 실대형 굴진시험을 통한 디스크커터 측정데이터 분석
2.1 디스크커터 마모측정 기술
선행연구(Ju et al., 2024; Kim et al., 2024)에서는 자기센서를 활용하여 디스크커터의 마모량을 측정할 수 있는 기술을 소개한 바 있다. 선행연구(Ju et al., 2024)를 통해 센서와 시작품을 대상으로 물, 이수안정액, 굴착버력 내에서 성능을 확인하였다. 자기센서는 홀효과(Hall effect)에 기반하여 자기장의 존재나 강도를 측정할 수 있는 센서이며, 센서의 출력값은 전자기장(Electro-magnetic field)의 변화에 대응한다. 디스크커터 링이 마모됨에 따라 자기센서와의 거리가 증가하고, 이에 따라 자기력선속밀도(Magnetic flux density)는 감소하게 된다. 감소된 자기력선속밀도를 자기센서에서 감지하여 전압값을 측정값으로 제공하게 되며, 디스크커터 링이 마모되에 상대적 거리가 증가함에 따라 전압값 역시 증가하는 선형적인 관계를 가진다. 센서의 전압값을 통해 디스크커터 링의 상대적 거리는 Ju et al. (2024)의 관계식을 통해 계산할 수 있다. 그리고 편마모 발생에 대한 탐지 및 판단을 위하여 디스크커터의 회전 수를 측정할 수 있는 홀센서(Hall sensor)를 추가적으로 설치하였다. 홀센서는 상술한 자기센서와 원리가 동일하며, 본 시작품에는 디지털 방식의 홀센서를 사용하였다. 홀센서는 자기장의 유무를 판단하여 0 또는 1의 값을 출력하는 방식으로 디스크커터 허브에 부착된 영구자석(Magnet)의 회전을 탐지하여 개별 디스크커터의 회전 수(RPM)를 측정하게 된다. 홀센서와 부착된 영구자석의 측정거리는 27 mm 이내로 설치하였다. 디스크커터 마모측정 시작품의 주요부품은 자기센서, 홀센서, 전원공급 배터리, 무선통신모듈 및 아두이노 보드이다. SS275 구조용 강재로 외부 케이싱을 제작하였다. Fig. 1은 디스크커터 마모측정 기술의 3차원 설계모델이며, 홀센서용 영구자석은 디스크커터 허브에 용접하여 설치하였다.

2.2 실대형 굴진시험 수행
Fig. 2와 같이 3.6 m급 토압식 TBM을 활용하여 27 MPa의 인공암반(콘크리트) 대상 실대형 굴진시험을 수행하였다. 선행연구(Ju et al., 2024; Kim et al., 2024)를 통해 디스크커터 센서 패키지의 측정성능, 무선통신 및 모니터링 시스템 연계, 내구성에 대한 성능검증이 일부 이루어졌다. 본 실대형 굴진시험은 정상적인 디스크커터와 편마모된 디스크커터의 센서 측정결과의 차이를 분석하기 위하여 수행되었다. Table 1과 같이 3번의 시험 케이스를 통해 굴진시험을 수행하였다. TBM의 추력은 인공암반 강도를 고려하여 최소 1,000에서 최대 1,500 kN까지 작용하였고, 커터헤드는 유압식 펌프가동을 통해 3.0, 4.5, 6.0 RPM으로 회전 가능하도록 운전하였다. 본 토압식 TBM의 구동부는 총 7대의 유압펌프로 구성되어 있으며, 개당 90 kW의 동력으로 설계되었다. 1개의 유압펌프 토출량은 400 L/min으로 설계되었으며, 1개의 유압모터 흡입량은 4.9 L/min으로 설계되었다. 구동부의 기어세트 감속비에 따라 Table 1과 같이 펌프 1개당 약 1.5 RPM으로 회전할 수 있도록 제작되었다.
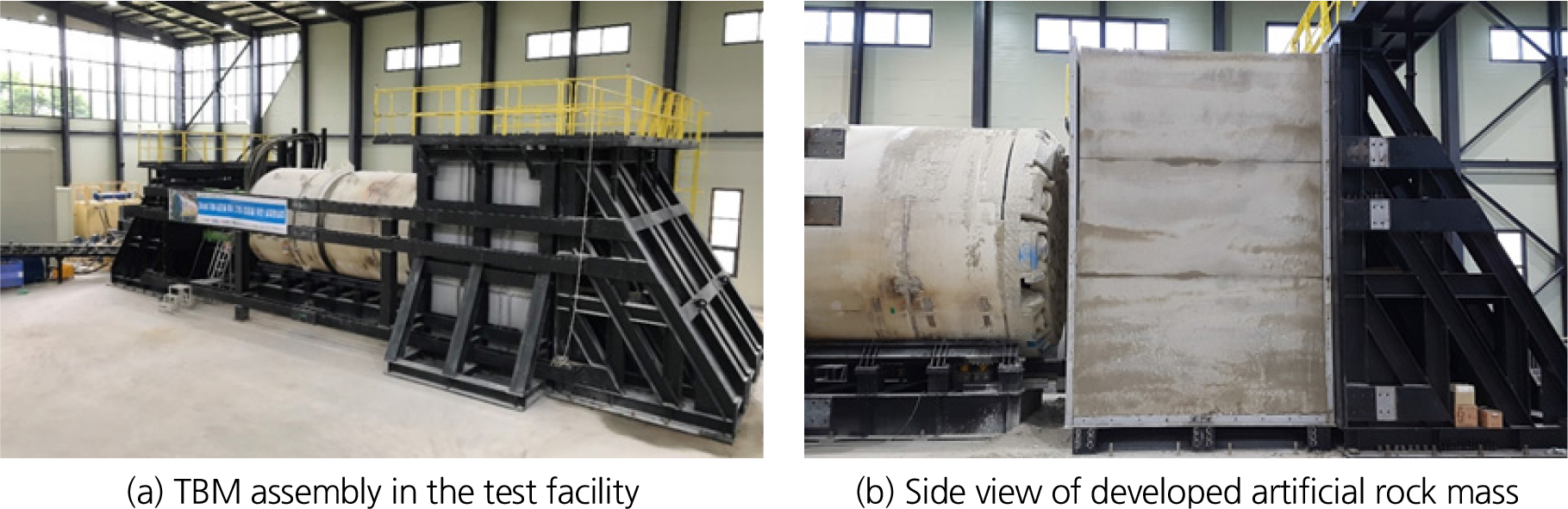
Table 1.
TBM operating parameters for full-scale tunnelling tests
| Test cases | Operating parameters | |
| Thrust force (kN) | RPM (rev/min) | |
| #Test 1 | 1,000~1,500 | 3.0 (2 pump, 180 kW) |
| #Test 2 | 4.5 (3 pump, 270 kW) | |
| #Test 3 | 6.0 (4 pump, 360 kW) | |
전력구 공사현장에서 17인치 크기의 정상마모된 디스크커터 1개(Fig. 3(a))와 편마모된 디스크커터 1개(Fig. 3(b))를 본 3.6 m급 토압식 TBM 커터헤드에 새롭게 설치하여, 센서의 신호차이를 획득하고자 하였다. 정상마모된 디스크커터는 19번 위치에 설치하였고, 편마모된 디스크커터는 7번 위치에 설치하였다.
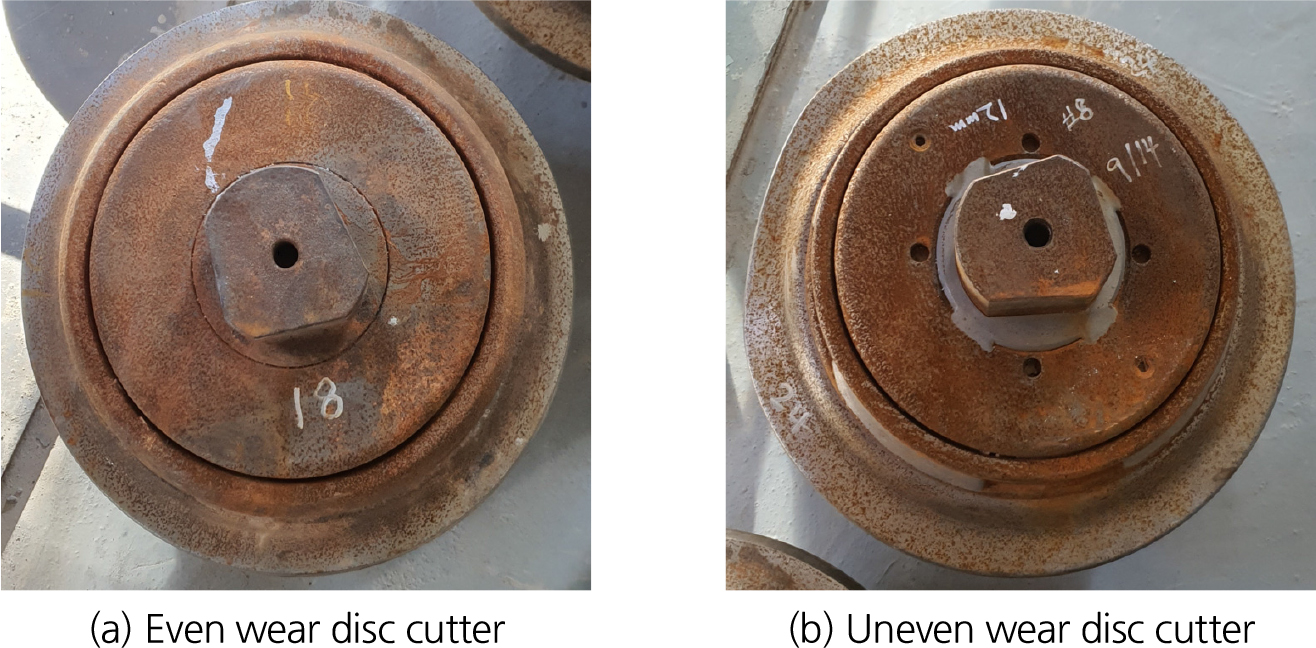
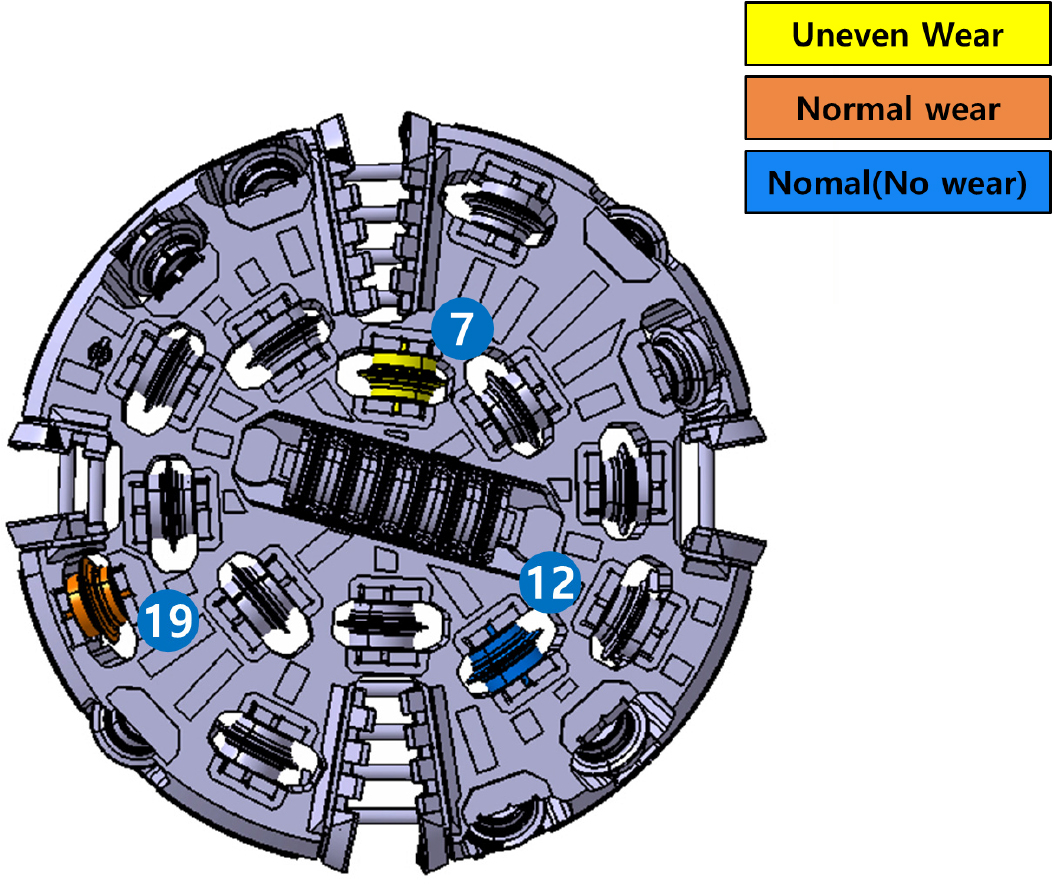
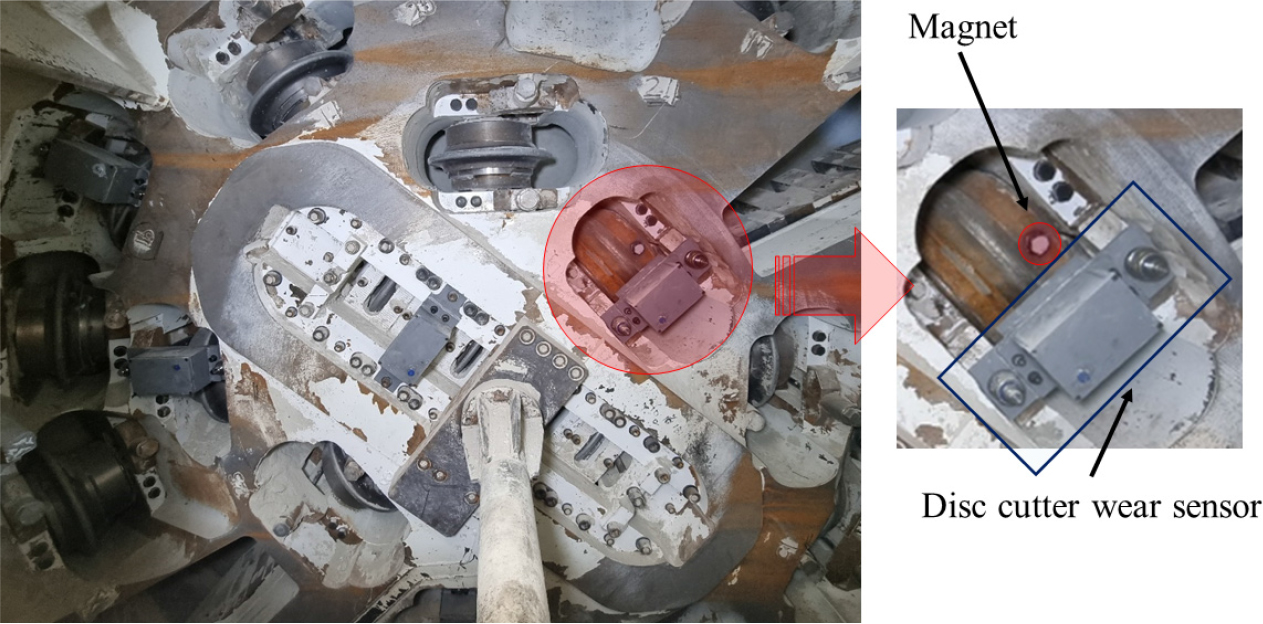
Fig. 4와 같이 디스크커터 마모측정 시작품 3개를 7번, 12번, 19번 디스크커터에 설치하여 정상상태, 정상마모된 상태, 편마모된 상태에서 어떠한 센서신호가 측정되는지 분석하도록 하였다. Fig. 5는 편마모된 디스크커터 7번에 설치된 마모측정 센서 패키지와 자석의 모습을 보여주고 있다.
2.3 마모상태에 따른 측정데이터 특성 분석
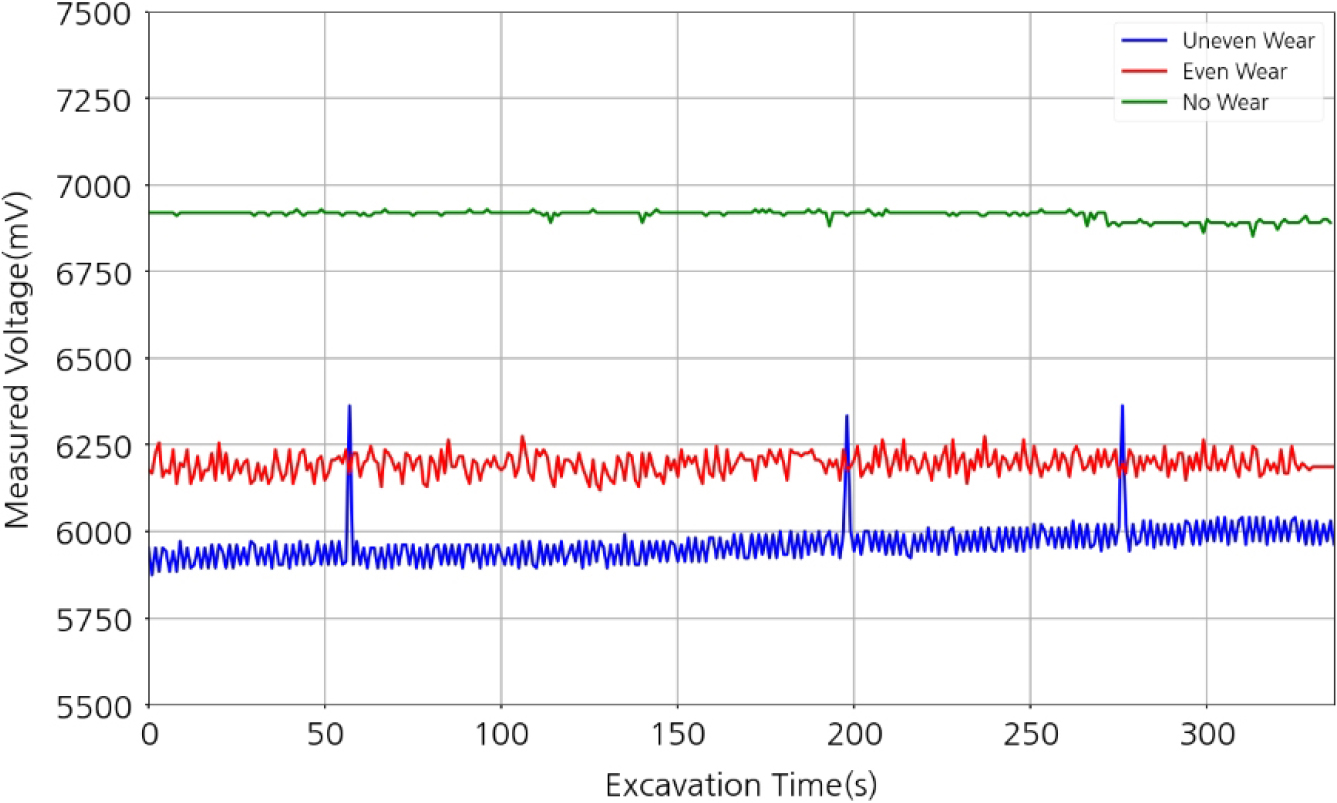
정상적인 디스크커터와 편마모된 디스크커터를 판별할 수 있는 데이터로는 자기센서의 측정된 전압(mV)값과 홀센서로 측정된 디스크커터의 개별 회전 수(RPM)값이 있을 수 있다. Fig. 6에 나타난 자기센서의 측정데이터를 살펴보면, 정상적인 디스크커터는 측정전압의 변동 표준편차가 약 ±62 mV이며, 균등마모된 디스크커터의 변동 표준편차가 약 ±81 mV로 정상적인 디스크커터의 비해 다소 크게 측정되었음을 확인하였다. 반면, 편마모된 디스크커터의 경우에는 측정 중 매우 큰 변화를 보이는 특이점을 발견하였다. 편마모된 디스크커터가 회전함에 따라 편마모된 부분을 자기센서가 측정한 값으로 판단된다.
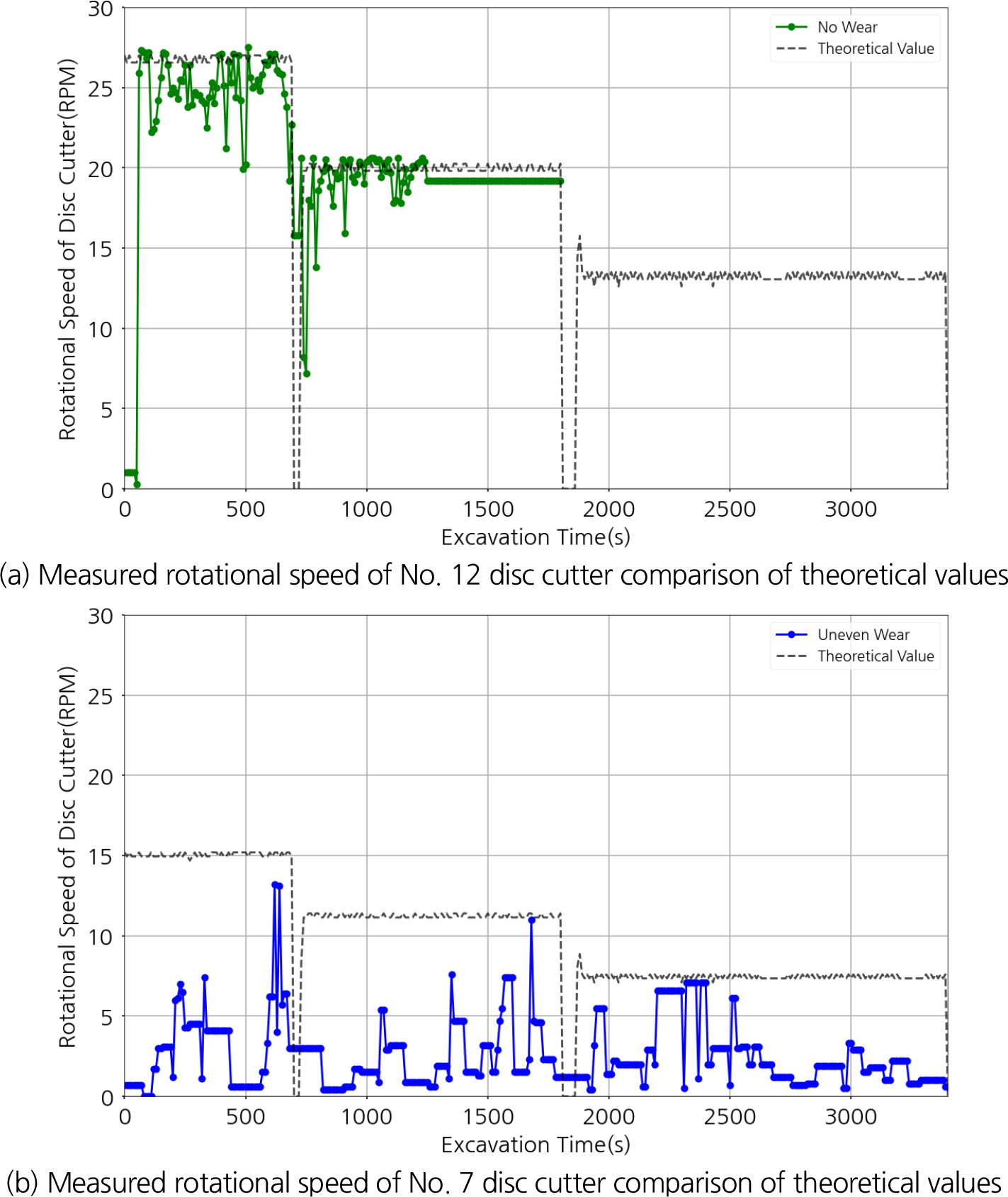
정상적인 디스크커터의 경우는 쉴드잭의 추력에 의해 암반에 균질하게 압입하고, 커터헤드가 회전함에 따라 동시에 개별 디스크커터도 원활하게 회전한다. 반면, 편마모와 같은 비정상적인 디스크커터의 경우는 디스크커터가 회전하다가 편마모된 부분에서 암반과 밀접하게 접촉하지 못하기 때문에 회전이 원활하지 않을 것으로 판단하였고, 개별 디스크커터의 회전속도를 측정을 통해 편마모를 분류할 수 있다고 판단하였다. 본 이론적 배경에 부합하게 정상적인 디스크커터(No. 12)의 경우는 커터헤드의 회전속도에 따라 이론적인 디스크커터 개별 회전 수를 따라 회전함을 확인할 수 있었다. 반면, 편마모가 발생한 디스크커터(No. 7)의 경우에는 이론적인 회전 수에 미치지 못하는 결과를 확인할 수 있었다. 커터헤드가 평균 2.9, 4.4, 5.9 RPM으로 회전함에 따라 12번 디스크커터는 이론적으로 26.55, 20.25, 13.05 RPM으로 회전이 예상되었다. Fig. 7(a)에서와 같이 이론적인 회전수와 매우 유사하게 회전을 원활하게 하는 것을 확인하였다. 정상적인 디스크커터에 설치된 센서 패키지의 홀센서 위치가 이탈하여 약 1,200초 이후에는 측정이 되지 못하였다. Fig. 7(b)와 같이, 편마모가 발생한 디스크커터는 이론적으로 15.20, 11.10, 7.3 RPM으로 회전이 예상되었다. 그러나 이론적인 회전 수 대비 약 평균 19%, 20%, 31% 수준으로 밖에 회전하지 못했음을 확인하였다. 본 실대형 굴진시험을 통해 자기센서와 홀센서에 측정된 센서신호를 바탕으로 편마모를 판단할 수 있는 근거를 발견하였다. 본 실대형 굴진시험에서 정상마모된 디스크커터에 설치된 시작품의 홀센서는 원활하게 작동하지 않아 측정되지 않아 분석에 활용되지 못하였다.
3. 딥러닝을 활용한 디스크커터 편마모 판단 알고리즘 개발
디스크커터의 수명 및 교체주기는 디스크커터의 마모량뿐만 아니라 마모상태에 따라 달라질 수 있다. 디스크커터의 마모상태는 크게 균등마모와 편마모로 분류할 수 있다. 본 연구에서는 디스크커터 마모측정 시작품의 자기센서와 홀센서의 시계열 데이터를 활용하여 디스크커터의 마모상태를 분류하는 모델을 개발하기 위해 딥러닝 기법을 사용하였다. 이 모델은 균등마모(Class: 0)와 편마모(Class: 1)로 레이블된 목표변수(Target)를 기반으로 하여 지도학습(Supervised Learning)을 수행하였다.
3.1 합성곱신경망(Convolutional Neural Network, CNN) 모델
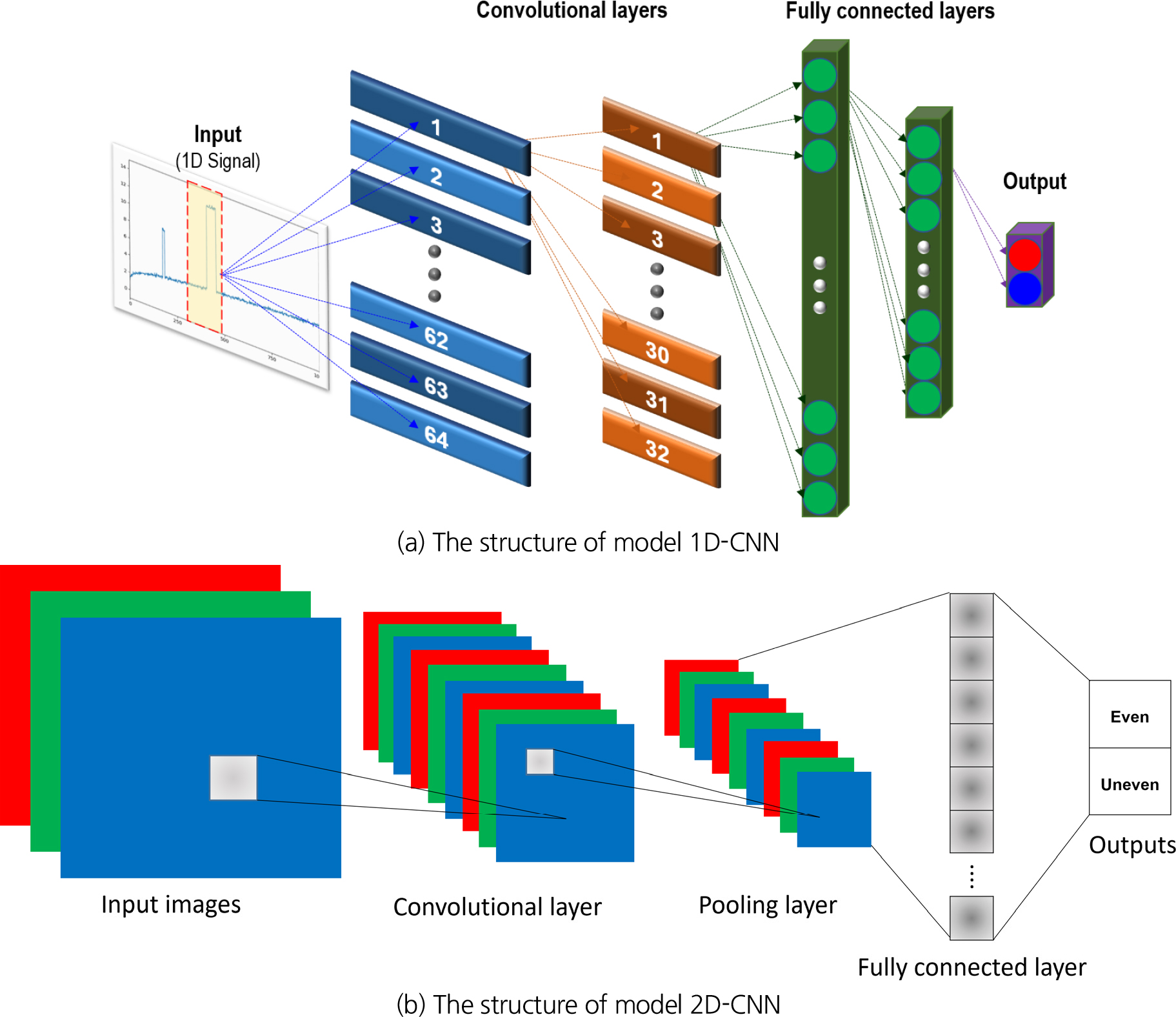
합성곱신경망(이하 CNN)은 이미지 처리와 패턴 인식 등 다양한 분야에서 사용되는 딥러닝 모델 중 하나이다. 딥러닝은 머신러닝의 한 분야로, 데이터의 특징을 스스로 학습할 수 있는 비교적 복잡한 인공 신경망 구조를 사용한다. 이로인해 많은 데이터와 연산량을 필요로 하지만 데이터의 복잡한 패턴을 학습할 수 있다. CNN 모델은 주로 이미지를 분류하는데 높은 정확성을 보인다고 알려져있지만, 데이터의 지역적인 패턴을 인식하고 학습할 수 있는 특징을 지니고 있어서 시계열 데이터 분석에도 활용되고 있다. CNN의 입력데이터가 시계열 데이터와 같은 1차원으로 구성된 데이터라면 1D-CNN라 하고, 2차원의 이미지인 경우 2D-CNN이라 한다. 본 연구에서 CNN 모델을 Keras 파이썬 패키지에서 제공한 함수와 기능들을 사용하여 구현하였다.
Fig. 8은 구현한 CNN 모델의 전체적인 구조를 의미한다. CNN 모델의 입력된 데이터는 형식을 모델에 적합한 형태로 전처리하게 된다. 예를 들어, 시계열 데이터의 경우에 스케일링을 적용하고, 이미지 데이터의 경우 크기를 조정하거나 정규화할 수 있다. 전처리된 데이터는 합성곱 층(Convolutional layer)에 입력되며, 필터(또는 커널)를 사용하여 합성곱 연산을 수행하고 특징 맵을 생성한다. 필터의 크기와 스트라이드(Stride)는 이러한 합성곱 연산을 조절하는 하이퍼파라미터이다. 필터의 크기는 입력 데이터에서 추출할 특징의 크기를 결정하고, 스트라이드는 필터가 입력 데이터를 이동하는 간격을 나타낸다. 필터의 크기가 클수록 입력 데이터에서 더 큰 패턴이 추출되며, 스트라이드가 클수록 특징 맵의 크기가 줄어들게 된다. 각 필터는 입력 데이터의 특정 부분에 대한 가중합을 계산하여 특징을 추출하며, 활성화 함수(Activation function)를 적용하여 비선형성을 도입함으로 복잡한 데이터 패턴을 효과적으로 학습할 수 있도록 한다. 다음으로 풀링 층(Pooling layer)이 적용이 되며, 주로 최대 풀링(Max pooling) 또는 평균 풀링(Average pooling)을 통해 특징 맵의 크기를 줄여서 계산량을 감소시키게 된다. 이 과정을 통해 입력 데이터를 단순화하고 중요한 정보를 유지하는 역할을 한다. 완전 연결층(Fully connected layer)은 CNN 모델의 마지막 단계에 해당하며, 이전 층에서 생성된 특징 맵을 1차원 벡터 형태로 변환하게 된다. 1차원 벡터의 각 뉴런은 가중치, 편향 그리고 Softmax 함수를 적용하여 입력 데이터가 어떤 클래스에 속할 확률을 식 (1)과 같이 계산하게 된다.
여기서, 는 1차원 벡터의 ()-번째 성분, 은 클래스의 총 개수를 의미한다.
이 변환을 통해 각 클래스의 출력값은 0과 1사이의 확률값으로 변환되며, 모든 클래스에 대한 확률값은 1이 된다. 확률은 모델이 각 클래스에 대해 가지는 신뢰도를 정량적으로 나타낸 값이다.
3.2 자기센서 데이터를 바탕으로 한 2D-CNN 편마모 판단 알고리즘 개발
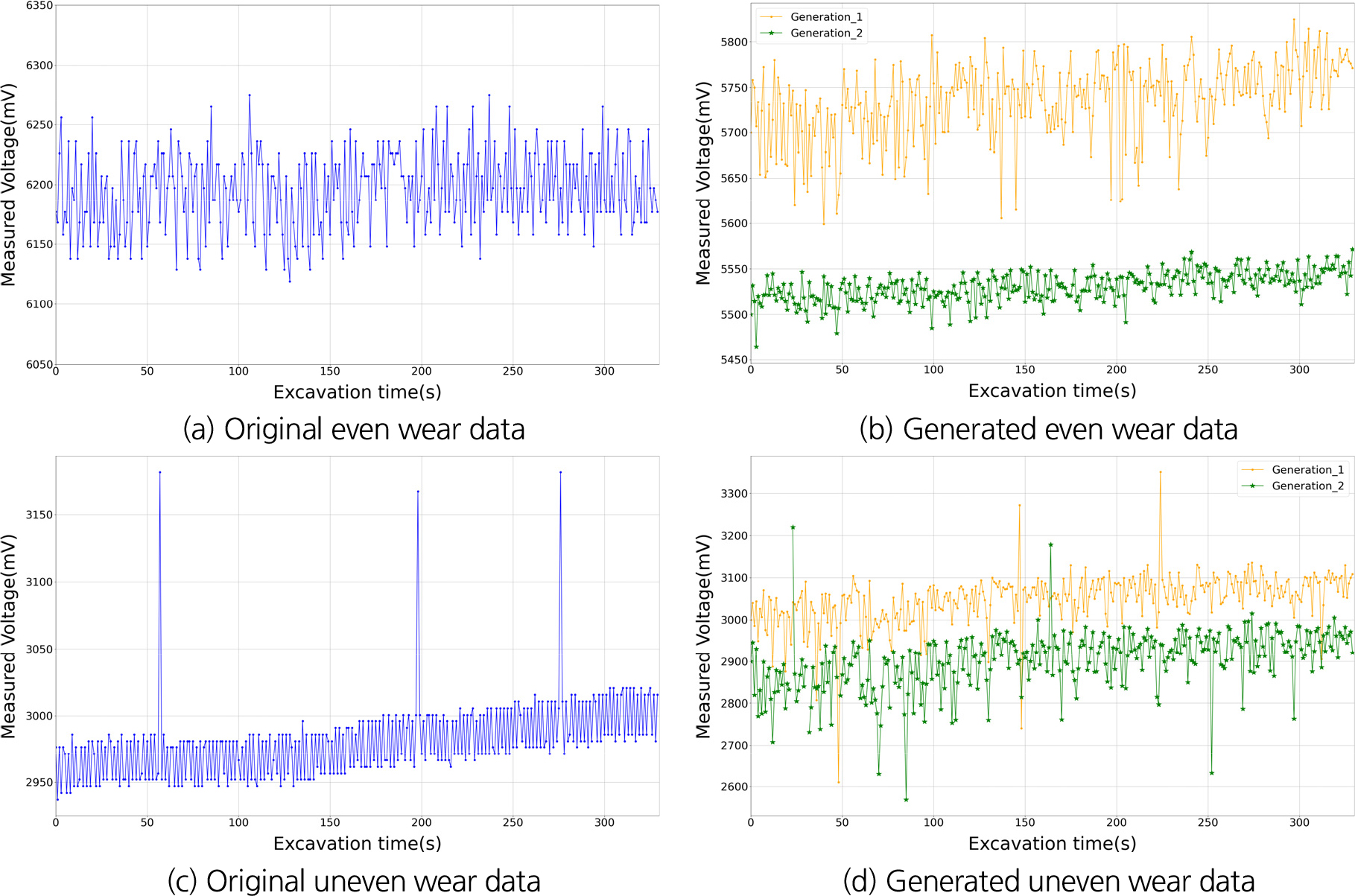
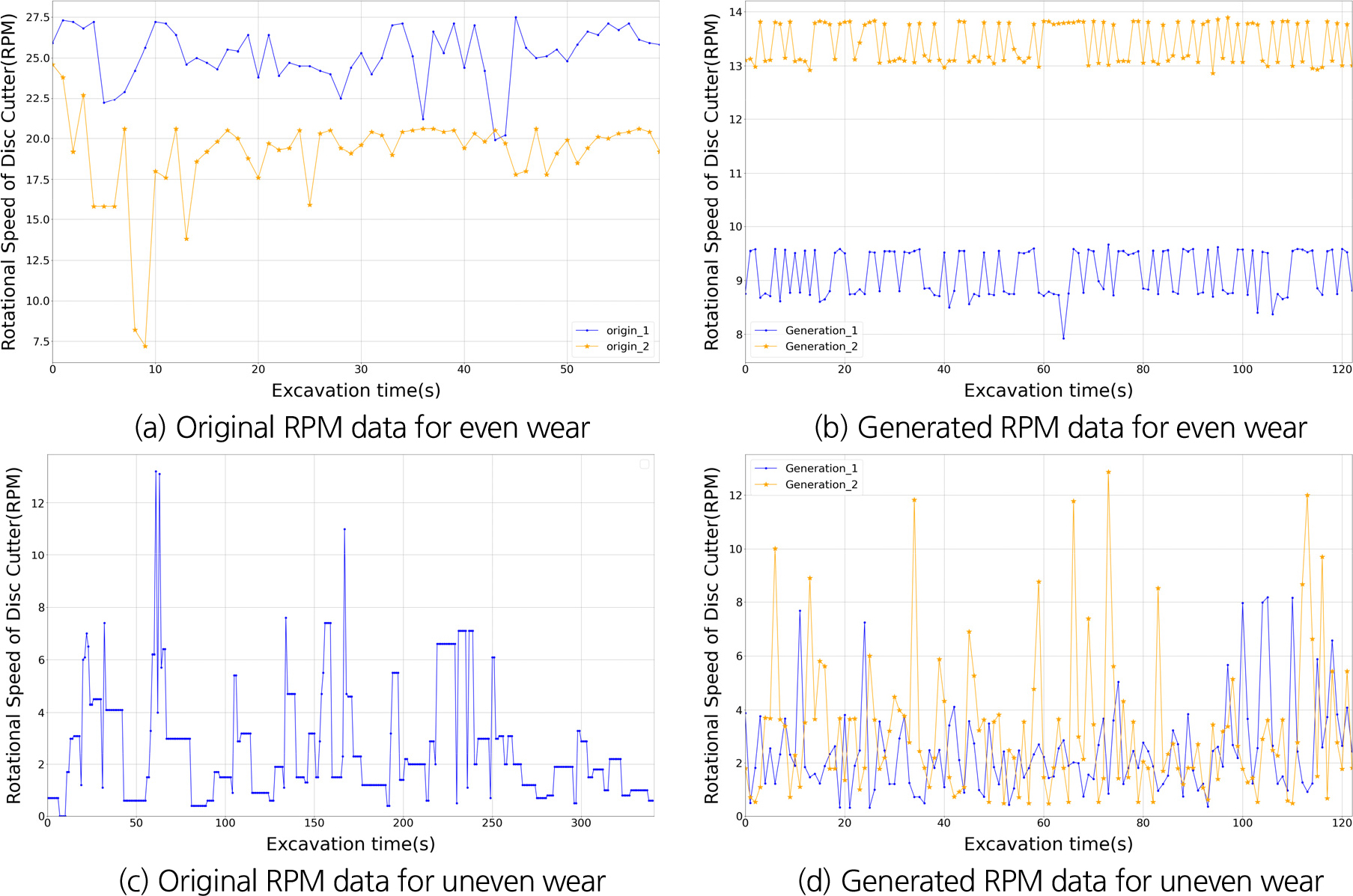
자기센서 측정데이터를 대량으로 축적하기엔 시간 및 경제적 비용이 많이 발생하기 때문에 실대형 굴진시험을 통해 수집된 데이터의 특징에 대한 기본적인 이해를 바탕으로 데이터를 생성하였다. Fig. 6의 실제 균등마모 데이터는 자기센서로 수집하였기 때문에 전압값으로 표현이 되어, 이를 마모량으로 환산하는 과정을 거쳤다(Ju et al., 2024). 마모량에 대한 시계열 데이터의 표준편차는 34.47 이지만, 마모센서 패키지의 재질이 노이즈에 영향을 준다는 사실을 확인하였고 이에 보수적으로 5에서 200까지 표준편차에 변동성을 주어 다양한 노이즈를 표현하여 균등마모와 유사한 데이터를 만들었고, 편마모의 경우 생성한 균등마모 데이터 내에 랜덤한 지점에 특이점을 만들었다. 최종적으로 균등마모와 편마모 데이터를 각각 5,000개씩 Fig. 9와 같이 생성하였다.
모델의 불균형한 학습의 방지와 모델의 일반화를 위해 계층화 5겹 교차검증(Stratified 5-fold Cross Validation)을 Fig. 10과 같이 적용하였다. 계층화 5겹 교차검증 기법은 모델의 성능을 평가하는 방법으로, 전체 데이터 셋을 5개의 샘플로 나누되, 각 샘플이 전체 데이터 셋의 클래스 분포를 반영하도록 계층화한다.
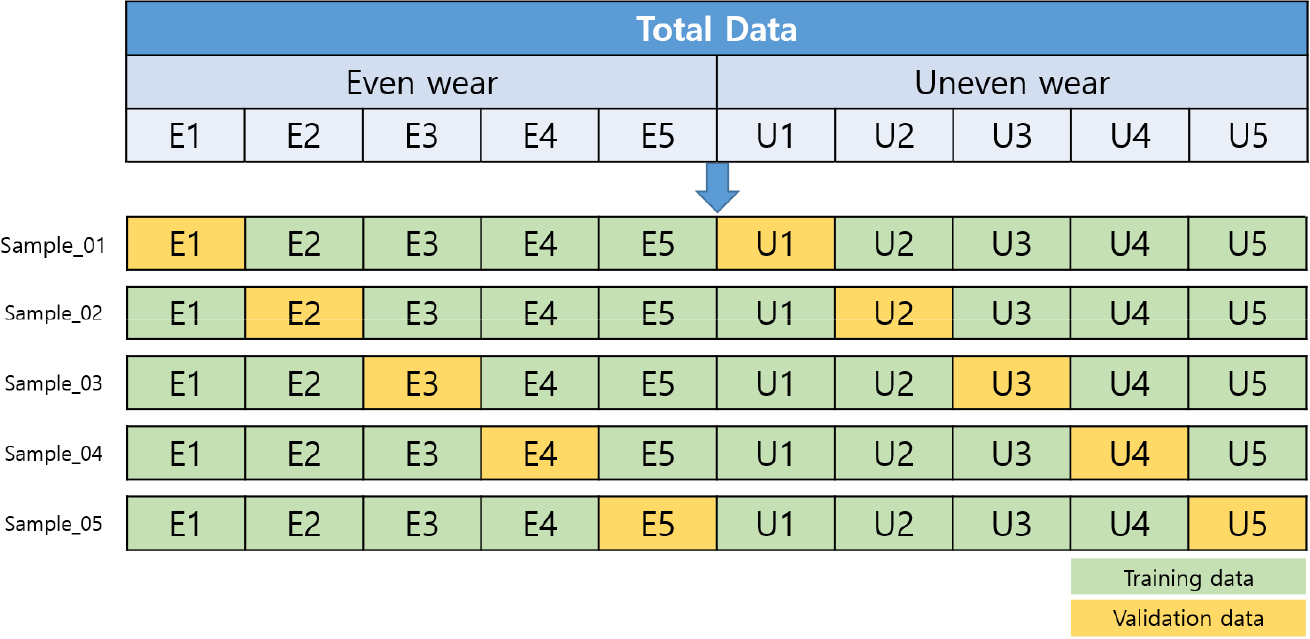
이후 5번의 반복을 통해, 학습데이터(Training data)의 비중을 80%로, 나머지 검증데이터(Validation data) 20%를 학습에 관여하지 않도록 설정하여 모든 데이터가 학습과 검증에 사용되도록 한다. 5개의 샘플(Sample_01~05)에 대하여 구현한 1D-CNN 모델의 학습 곡선은 아래의 Fig. 11과 같이 시각화할 수 있다.
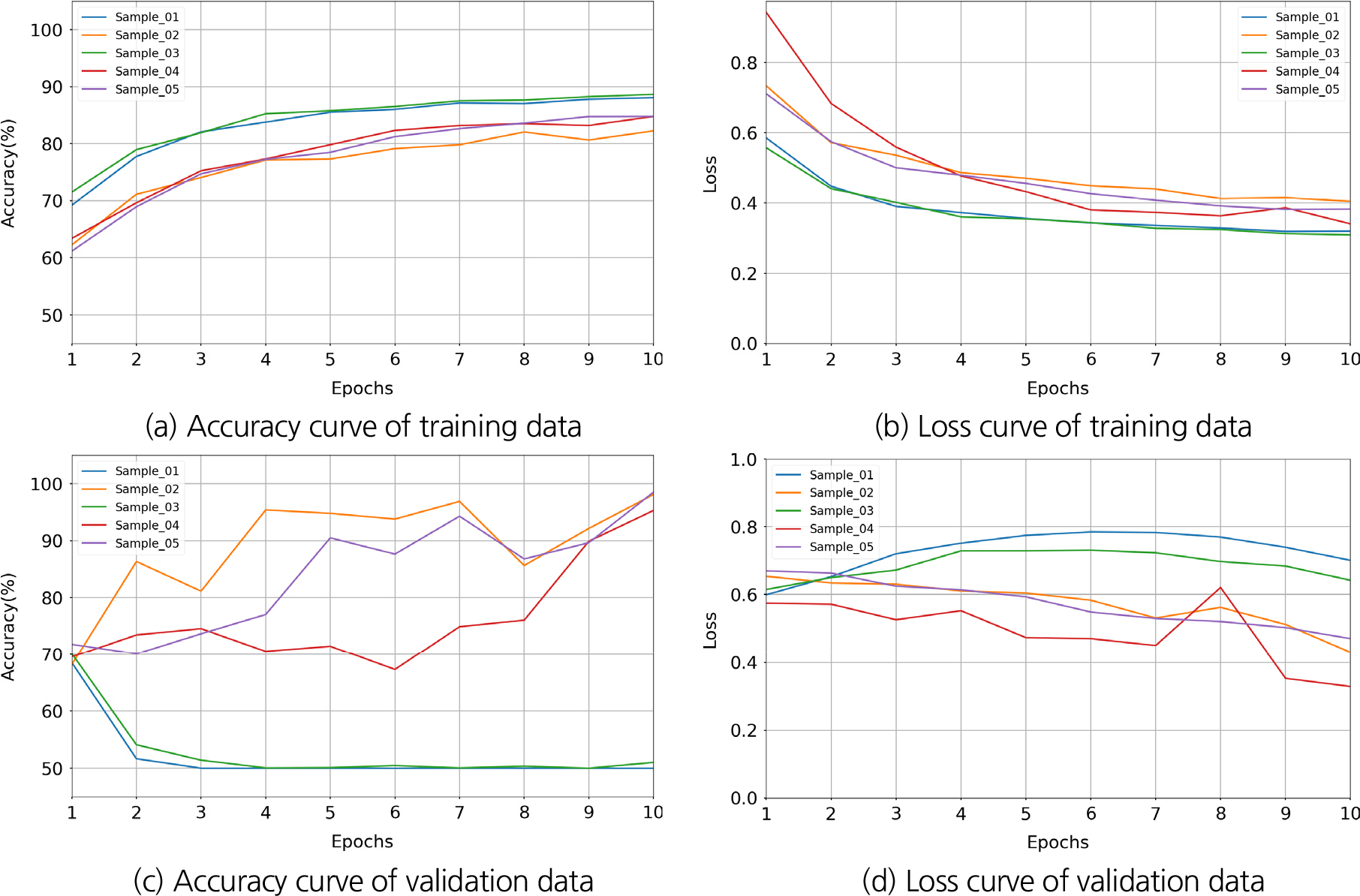
Fig. 11의 (a)와 (c)는 훈련데이터와 검증데이터의 학습 횟수(Epoch)에 따른 분류 정확도의 그래프를 나타내고, (b)와 (d)는 분류 모델의 손실 그래프를 나타낸다. 모델이 학습을 하는 과정에서 훈련데이터와 검증데이터의 정확도는 우상향하며 두 값의 차이가 감소하고 손실값은 감소하는 개형을 가져야 학습이 올바르게 진행되었다고 판단할 수 있다. 그러나 Sample_01과 Sample_03의 경우, 훈련데이터의 학습과정에 비해 검증데이터의 학습이 불안정하게 진행되는 과적합(Overfitting) 현상을 확인할 수 있었고 정확도의 차이는 38.08%이다. 과적합이란 모델이 학습에 사용한 훈련 데이터에 지나치게 적합하여 새로운 데이터에 대한 일반화 능력이 저하되는 현상을 뜻하며 해결하기 위한 방법으로 모델의 하이퍼 파라미터 조절, 데이터의 전처리 등 일반화 성능을 향상시키는 방법들이 존재한다. 모델의 하이퍼 파라미터를 조절할 경우, 시계열 데이터의 길이와 노이즈로 인한 과적합과 성능에 비해 비효율적인 학습시간을 확인하였다. 이에 식 (2)와 같이 노이즈 문제와 시계열 데이터의 길이에 영향을 받지 않는 연속 웨이블릿 변환(Continuous wavelet transform)으로 전처리하는 방법을 선택하였다.
여기서, 는 시계열 데이터, 는 웨이블릿 함수, 𝛼는 웨이블릿 함수의 스케일 변수, 𝛽는 웨이블릿 함수의 이동 변수이다.
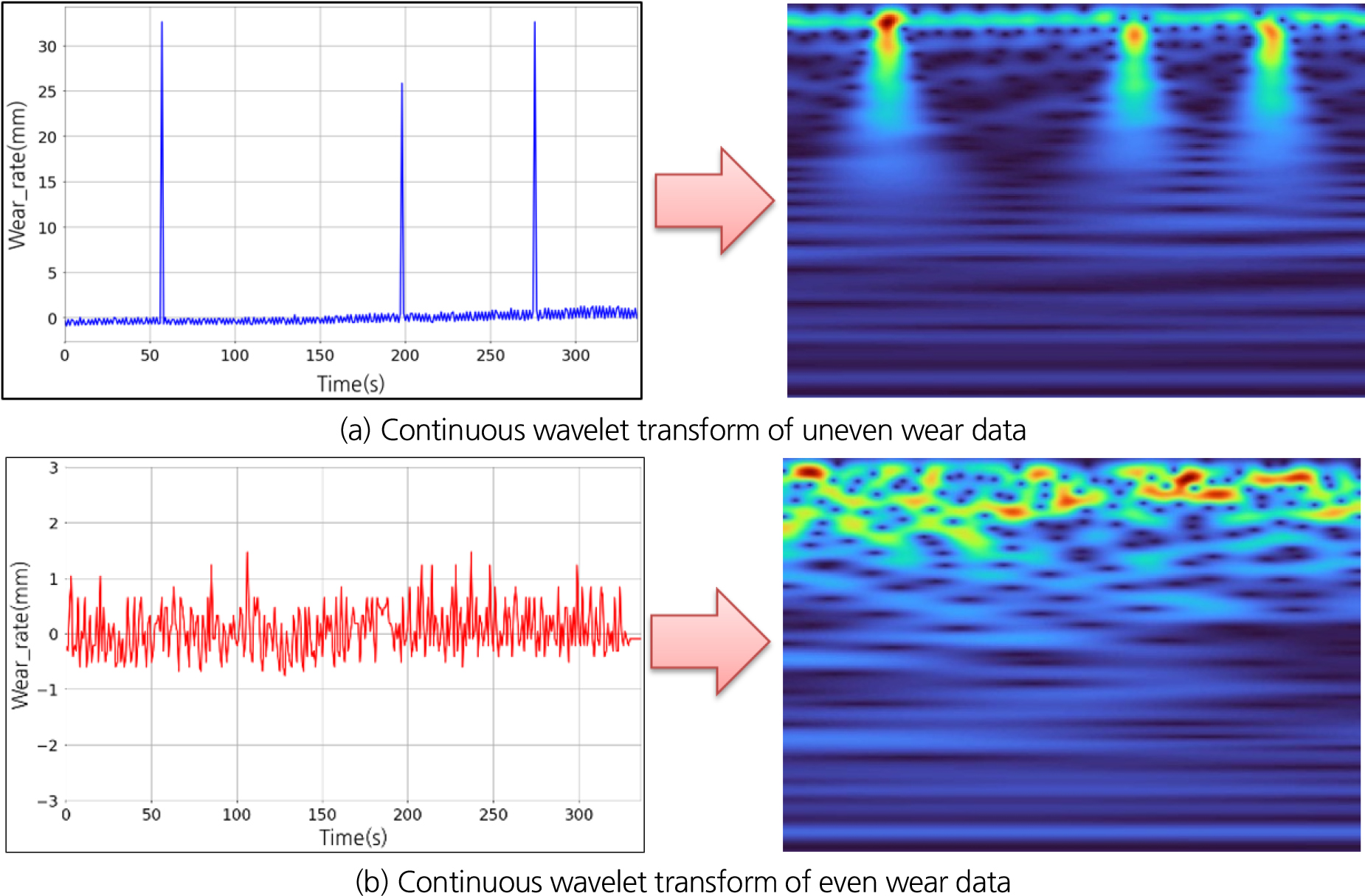
웨이블릿 함수 는 에 포함되어야 하고, 푸리에 변환을 한 가 을 만족해야하며, 는 주파수를 의미한다. 연속 웨이블릿 변환은 웨이블릿 함수의 스케일 변수를 조절하여 주어진 시계열 데이터의 고주파와 저주파를 동시에 분석할 수 있어서 다른 주파수 대역에서의 세부 정보를 제공하기 때문에 노이즈에 강한 특성을 가진다(Lilly, 2017). 노이즈는 주로 고주파수 성분으로 표현되며, 이러한 고주파수 성분은 연속 웨이블릿 변환에서 상대적으로 낮은 해상도를 가지는 주파수 대역에 집중된다. 웨이블릿 함수 중 하나인 일반화된 모스 웨이블릿(Generalized Morse Wavelet, GMW)을 사용하였고(Lilly and Olhede, 2012), 이 변환을 통해 시간(x축)과 주파수(y축) 그리고 진폭(색상)에 대한 정보를 담고 있는 이미지를 Fig. 12와 같이 생성하여 2D-CNN 모델의 입력데이터로 활용하였다.
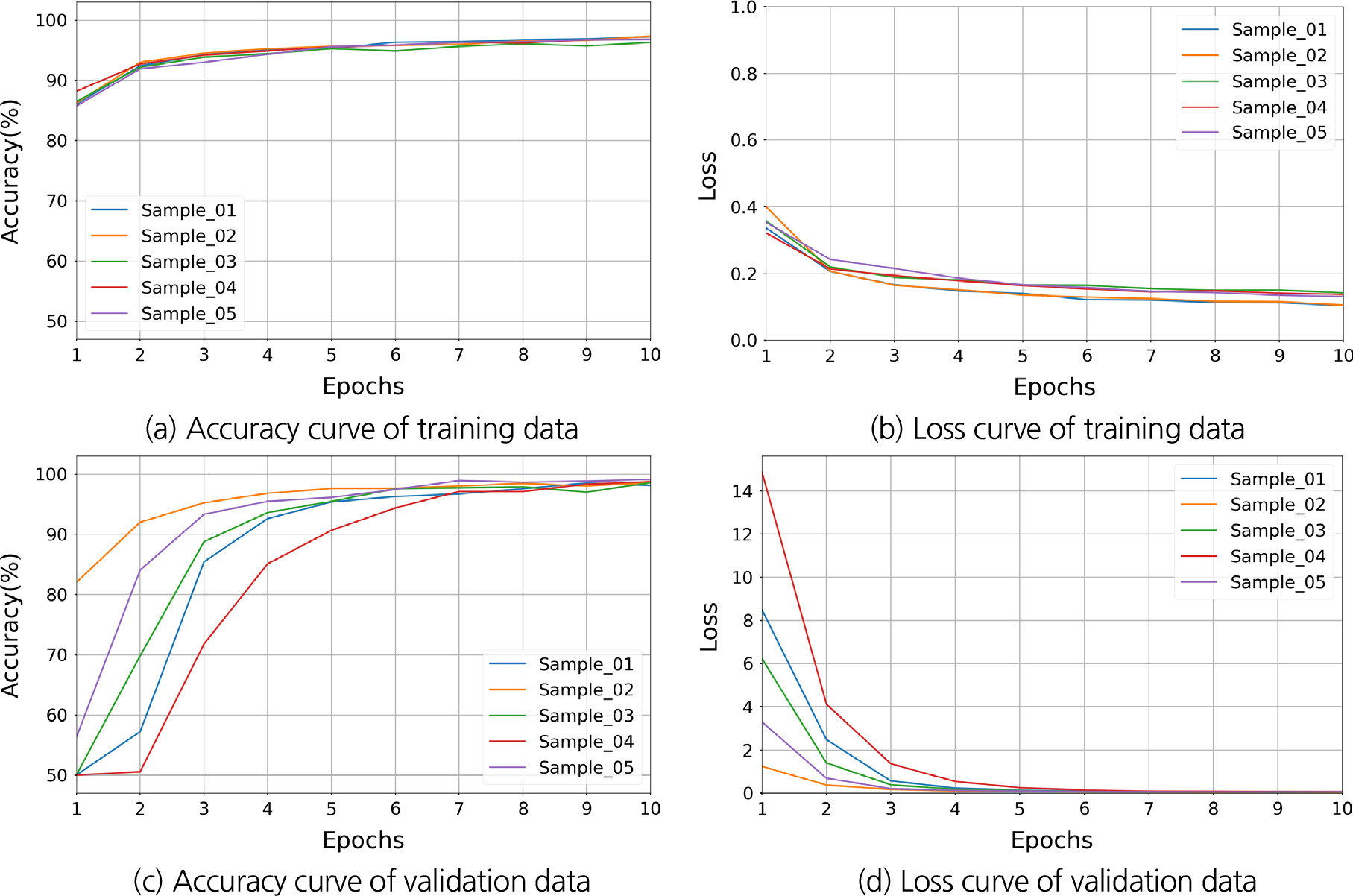
1D-CNN 모델의 학습 곡선과 다르게 학습 횟수에 따라 정확도는 우상향, 손실은 우하향하는 개형임을 확인할 수 있다. Fig. 13의 학습과정을 보면 샘플을 달리해도 견고한 모델의 성능을 확보하였고 학습데이터와 검증데이터의 정확도 차이가 약 2.32%의 차이로 1D-CNN 모델보다 일반화 능력이 우수하다는 것을 의미한다.
분류 모델의 성능을 시각화하고 평가하기 위해 Fig. 14와 같은 혼동행렬을 사용한다. 혼동 행렬의 성분은 모델이 예측한 클래스와 실제 클래스 간의 관계를 나타내는 값으로 이루어져 있다. 이 성분들을 이용하여 딥러닝 기반 분류 모델의 성능평가 지표인 정확도(Accuracy), 정밀도(Precision), 재현율(Recall)을 계산할 수 있다(Table 2). 특히, 정밀도와 재현도는 Trade-off 관계이며, 이 값들의 조화평균으로 F1-score가 사용된다.
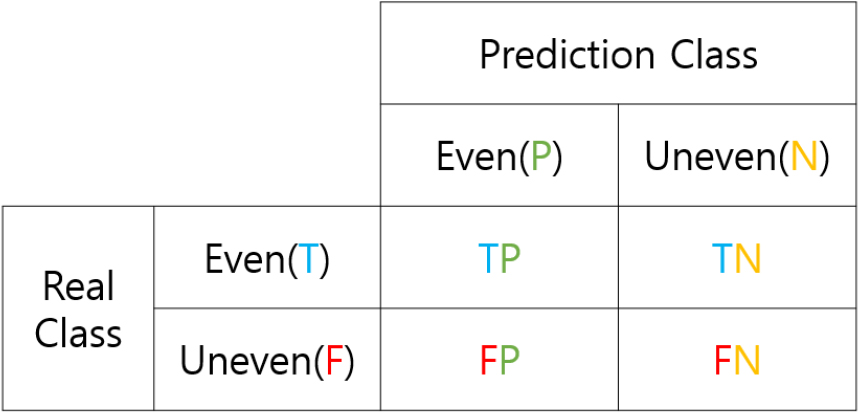
Table 2.
Confusion matrix indicators
| Indicators | Equations | |
| Even wear | Uneven wear | |
| Accuracy | ||
| Precision | ||
| Recall | ||
| F1-score | ||
Fig. 15는 두 CNN 모델의 혼동행렬을 나타낸 것이다. 1D-CNN 모델의 정확도는 78.58%, 정밀도는 균등마모일 경우 70.3%, 편마모일 경우 98.5%, 재현도는 균등마모일 경우 99.1%, 편마모일 경우 58.0% 그리고 F1-score는 균등마모일 경우 82.2%, 편마모일 경우 73.0%를 달성하였다. 2D-CNN 모델의 정확도는 98.62%, 정밀도는 균등마모일 경우 97.5%, 편마모일 경우 99.8%, 재현도는 균등마모일 경우 99.8%, 편마모일 경우 97.5% 그리고 F1-score는 균등마모일 경우 98.6%, 편마모일 경우 98.6%를 달성하였다. 편마모의 정밀도는 모델이 편마모로 예측한 개수 대비 실제로 편마모의 개수를 나타내며, 1D-CNN 모델은 2,098개, 2D-CNN 모델은 126개로 단순하게 시계열 데이터를 이용한 것보다 연속 웨이블릿 변환을 통한 전처리 방법이 모델의 성능 향상에 기여했다고 볼 수 있다. 모델을 구성하는 층과 사양은 Table 3과 같다.
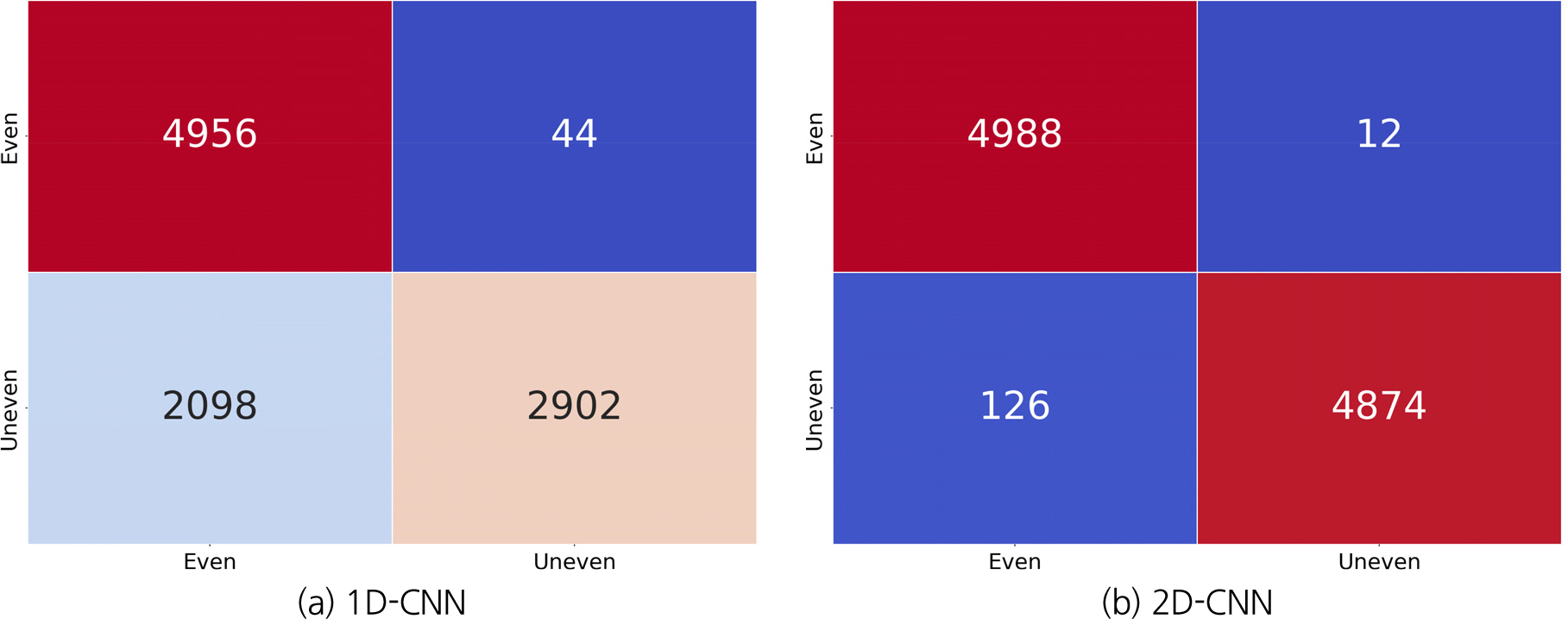
Table 3.
The architecture of 2D-CNN
모델의 데이터는 시뮬레이션으로 생성하여 학습에 사용하였으므로, 실제 디스크커터 마모센서로부터 수집한 데이터를 잘 예측할 수 있는지 판단하는 검증 과정이 필요하다. Fig. 16은 계층화 5겹 교차검증으로부터 학습된 2D-CNN 모델 5개로 Fig. 6의 균등마모 데이터와 편마모 데이터를 분류한 결과이다.
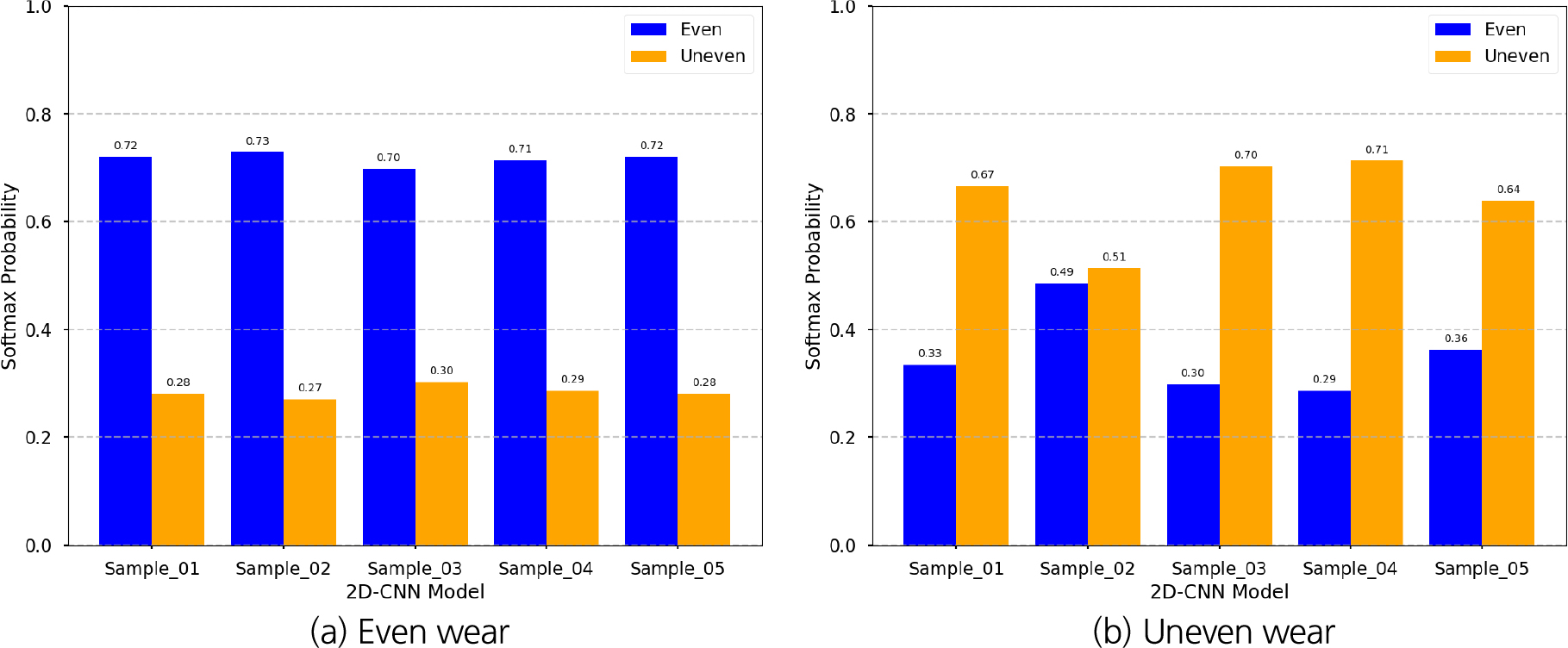
시뮬레이션으로 생성한 데이터를 학습한 모델은 실험 데이터에 대해서도 올바르게 분류한 결과를 얻었다. Fig. 16(b)에서 Sample_02 모델의 Softmax 값은 0.49, 0.51로 다른 모델들에 비해 저조한 분별 능력을 보였으나, 학습 데이터의 양과 질을 늘린다면 현재 개발한 마모 상태 분류 모델의 정밀도를 향상 시킬 수 있을 것이다.
3.3 홀센서 데이터를 바탕으로 한 1D-CNN 편마모 판단 알고리즘 개발
자기센서 측정데이터와 마찬가지로 홀센서 측정데이터 또한 대량으로 축적하기엔 시간 및 경제적 비용이 많이 발생하기 때문에 실대형 굴진시험을 통해 수집된 데이터의 특징에 대한 기본적인 이해를 바탕으로 데이터를 생성하였다. Fig. 7의 디스크커터 RPM 이론값은 TBM 커터헤드의 회전속도와 커터헤드 중심으로부터 디스크커터의 거리 그리고 디스크커터 반경을 고려하여 계산되었다. 이로부터 마모상태에 따라 측정값과 이론값의 차이값이 다름을 확인하였고, TBM 커터헤드의 회전속도를 3, 4.5, 6에 대해 고정한 상태에서 이론값과 측정값 차이의 비율(균등마모의 경우 0.36~1.52, 편마의 경우 0.04~0.97)을 랜덤하게 하여 각각 5,000개씩 Fig. 17과 같이 생성하였다.
모델의 불균형한 학습을 방지하고 모델의 일반화된 성능을 위해 계층화 5겹 교차검증을 수행하였다. 구현한 1D-CNN 모델의 학습 곡선은 Fig. 18과 같이 학습이 올바르게 진행되었다고 판단할 수 있다.
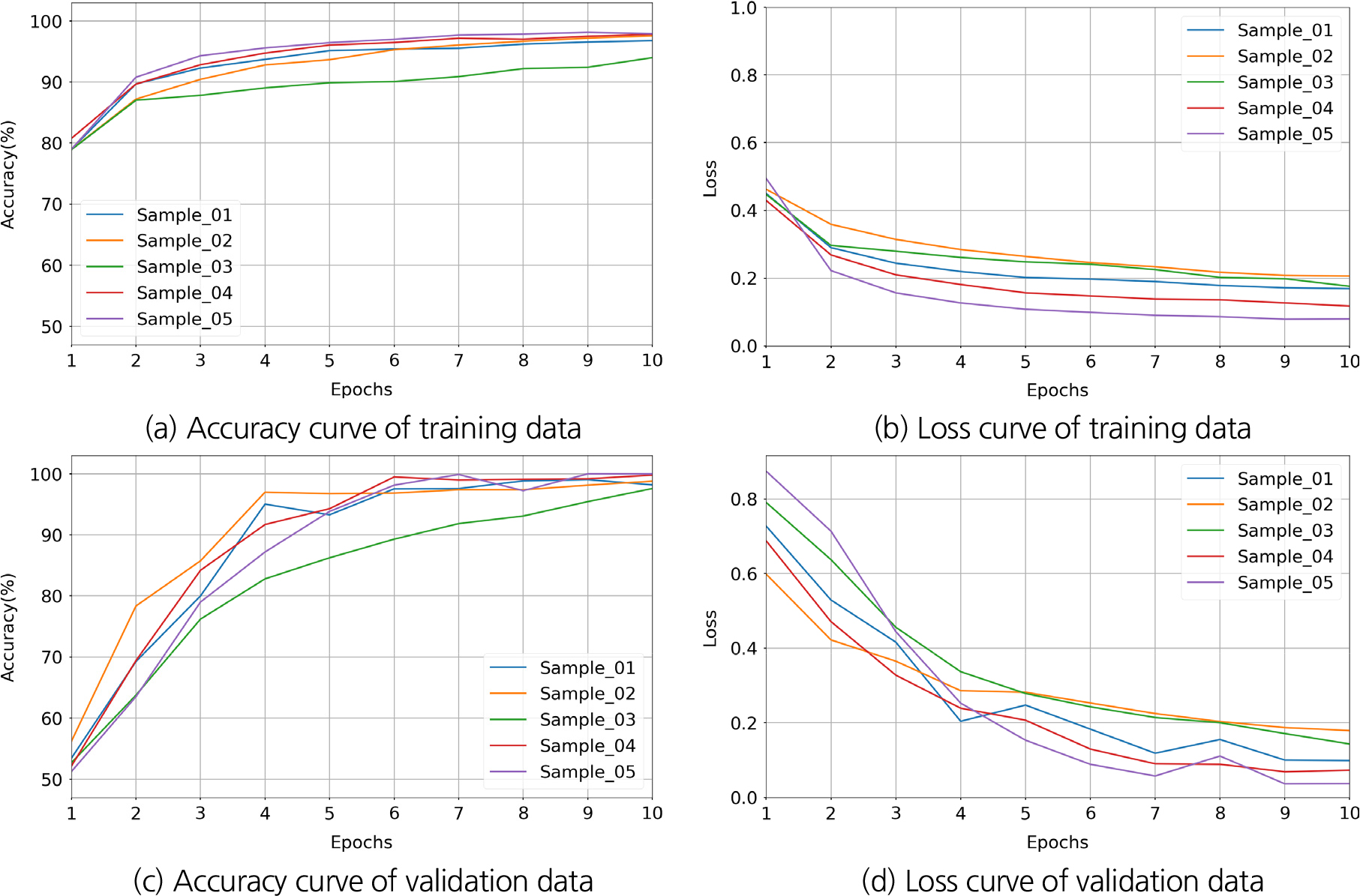
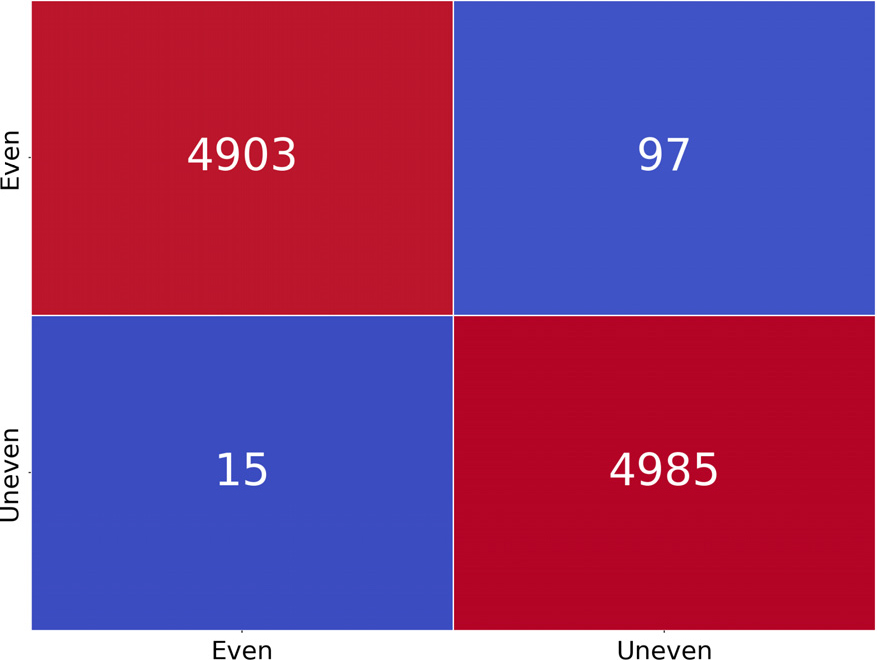
Fig. 19는 1D-CNN 모델의 혼동행렬을 나타낸 것이다. 모델의 정확도는 98.88%, 정밀도는 정상마모일 경우 99.7%, 편마모일 경우 98.1%, 재현도는 정상마모일 경우 98.1%, 편마모일 경우 99.7% 그리고 F1-score는 정상마모일 경우 98.9%, 편마모일 경우 98.9%를 달성하였다. 편마모의 정밀도는 15개의 오분류를 하였으며, 시계열 데이터에 별도의 전처리를 하지 않더라도 자기장 센서 데이터에 비해 높은 성능을 달성했다. 모델을 구성하는 층과 사양은 아래의 Table 4와 같다.
Table 4.
The architecture of 1D-CNN
자기센서 데이터로 학습한 모델과 마찬가지로 실제 디스크커터 홀센서로부터 수집한 데이터를 잘 예측할 수 있는지 판단하는 검증 과정이 필요하다. Fig. 20은 계층화 5겹 교차검증으로부터 학습된 1D-CNN 모델 5개로 균등마모 RPM 데이터와 편마모 RPM 데이터를 분류한 결과이다.
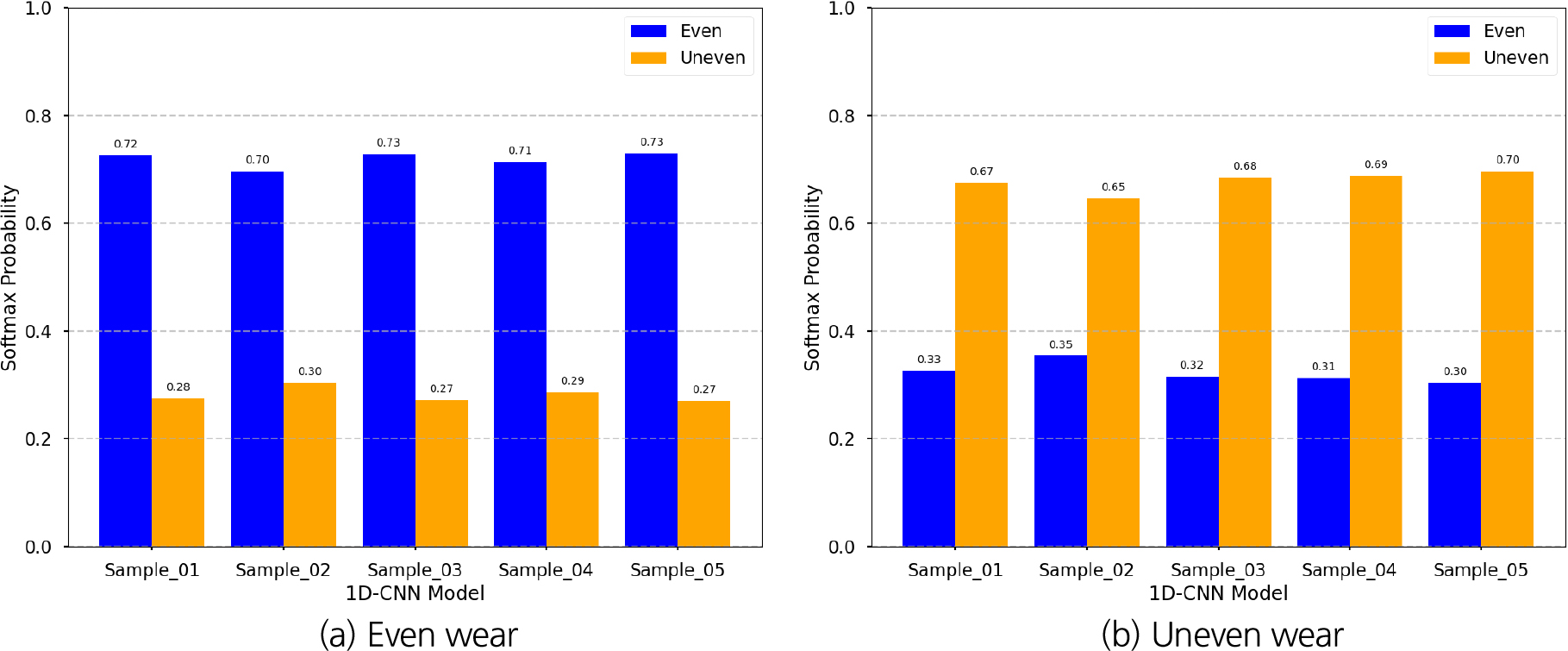
Fig. 16과 달리 높은 Softmax 값의 차이로 올바르게 분류한 결과를 얻었음을 확인할 수 있었다. 또한, 홀센서로 수집한 RPM 데이터가 자기센서 데이터보다 현저히 적은 수의 모델 파라미터로 높은 성능으로 분별하였으므로, 디스크커터의 마모상태 알고리즘을 개발하는데 있어서 RPM 데이터를 활용하는 방법이 더 효율적인 방법이라 할 수 있다.
4. 결 론
본 연구는 전력구 터널 건설에 활용되는 TBM에 적용할 수 있는 디스크커터 마모측정 기술을 개발하고, 측정된 데이터를 바탕으로 편마모 발생에 대한 판단을 위해 딥러닝 기술을 적용하였다.
1. 실대형 굴진시험을 통해 정상적인 디스크커터와 편마모된 디스크커터를 대상으로 센서 측정데이터를 분석하였다. 편마모된 디스크커터의 경우 자기센서의 측정 전압값이 급격하게 상승하는 특이점들을 발견할 수 있었다. 그리고 홀센서를 통해 측정된 회전 수를 살펴보면 정상적인 디스크커터 대비 이론적인 회전 수에 비해 약 평균 19%, 20%, 31% 수준으로 저조하게 회전 함을 발견하였다. 두 가지 센서 측정결과를 바탕으로 편마모된 디스크커터를 판단할 수 있는 근거를 확보하였다.
2. 마모측정 기술 시작품의 자기센서 측정 데이터를 기반으로 2D-CNN 편마모 판단 알고리즘을 개발하였다. 시뮬레이션을 통해 균등마모와 편마모 데이터를 생성하였고, 연속 웨이블릿 변환을 사용하여 노이즈 문제를 해결한 후 2D-CNN 모델을 구축하였다. 모델의 성능은 혼동행렬을 통해 평가하였고, 시계열 데이터를 직접 분석하는 것 보다 연속 웨이블릿 변환으로 전처리한 모델이 높은 정확도의 성능을 보였다. 또한, 시뮬레이션 데이터를 사용하여 학습한 모델이 실제 데이터의 특징을 잘 예측할 수 있음을 확인하였다.
3. 홀센서 측정 데이터를 기반으로 1D-CNN 편마모 판단 알고리즘을 개발하였다. 시뮬레이션을 통해 균등마모와 편마모 데이터를 생성하였고, 1D-CNN 모델을 구축하였다. 모델의 성능은 혼동행렬을 통해 평가하였고, 시계열 데이터를 직접 분석한 모델이 높은 정확도의 성능을 보였다. 또한, 시뮬레이션 데이터를 사용하여 학습한 모델이 실제 데이터의 특징을 잘 예측할 수 있음을 확인하였다.
4. 실제 현장이 아닌 실대형 굴진시험을 통해 대량으로 축적하기엔 시간 및 경제적 비용이 많이 발생한다. 실험으로부터 수집된 데이터의 특징에 대한 기본적인 이해를 바탕으로 시뮬레이션을 통해 데이터를 생성하였고 실제 실험 데이터로 모델을 검증하는 방법론을 제시하였다. 향후, 현장 데이터를 추가적으로 확보하여 모델의 일반화 성능을 향상시키고자 한다.
