

1. 서 론
2. 현장 시험
2.1 현장 소개
2.2 사진 측량 기반 이미지 수집
2.3 SfM 기반 3D 재구성
3. 방법론
3.1 최적의 경사각 및 방향 측정법 선정
3.2 포인트 법선 계산을 위한 LNR 최적화
3.3 필터링 경사각 최적화
4. R-C-D 방법
5. 결 론
1. 서 론
기술의 발전으로 암반의 기하학, 운동학 및 역학에 대한 이해가 지속적으로 향상됨에 따라 암반 절리에 대한 연구는 상당한 진전을 이루었다. 암석 경사각과 경사 방향을 측정하기 위해 Brunton 또는 Silva 나침반처럼 지질 나침반과 같은 전통적인 방법이 사용되었다(Compton, 1985). 이러한 나침반들은 수평면을 암석 표면과 정렬하여 암석의 주향과 경사를 직접 측정하기 위해 사용되었다(Ragan, 2009). 기술이 발전함에 따라 대규모 구조적인 데이터를 보다 정확하고 효율적으로 얻기 위해 디지털 경사계, 레이저 거리 측정기, 그리고 항공 사진, 위성 이미지, LiDAR (light 감지 및 범위 지정)와 같은 원격탐사 기술들이 도입되었다(Hengl and Reuter, 2008; Brush et al., 2019; Collettini et al., 2006). 보다 효율적이고 정확한 측정에 대한 과제를 해결하기 위해 연구자들은 자동 감지 기술을 탐색하기 시작했으며, 이러한 방향의 초기 시도에는 디지털 사진을 사용한 이미지 분석(Jaboyedoff et al., 2012)과 3D 사진 측량법 개발(Sturzenegger and Stead, 2009)이 수행되어 왔으며, 이러한 방법을 통해 연구자들은 노출된 암석로부터 구조적 정보를 얻을 수 있었다. 또한 인공신경망(ANNs)과 서포트 벡터 머신(SVM) 등과 같은 기계학습 알고리즘을 적용해 속성 기반으로 지질 구조를 자동으로 분류하고 식별하고 있다(Girardeau-Montaut, 2014). 이러한 발전에 기초하여 Anders et al. (2016)은 LiDAR 포인트 클라우드를 사용하여 지질의 표면에서 3D 평면, 특히 방위와 경사를 감지하기 위한 자동 접근 방식을 개발했으며, 이 방법에서는 필터링 및 면 세분화는 물론 중요한 지질학적 정보를 추출할 수 있는 RANSAC 기반 평면 피팅 기술이 포함되어 있다. 이 연구의 결과는 다양한 지질의 표면 설정에서 3D 평면을 정확하게 식별하여 지질 연구 및 분석의 효율성을 증진시켰다.
Deweza et al. (2016)은 대규모 3D 포인트 클라우드를 개별 평면 패셋(facets)으로 효율적으로 평면을 세분화하고 경사 및 경사 방향을 계산하여 추출된 데이터를 대화형 스테레오그램으로 알려주는 CloudCompare v2.6.2의 전용 플러그인(dedicated plugin)인 FACETS를 도입함으로써 이 분야에 더욱 기여했다. 플러그인은 Kd-Tree 및 Fast Marching 알고리즘을 사용하여 포인트 클라우드를 하위 셀로 분할하고, 기본 평면 개체를 계산하여 행성(planetary) 임계값을 기반으로 이를 다각형으로 집계할 수 있다. 이 연구 결과에 따르면 FACETS는 186,000개 포인트의 데이터 세트에서 평면 추출에 93.6%의 성공률을 달성하여 지질 및 비지질 분야를 포함한 다양한 응용 분야에 적용 가능한 것으로 나타났다. 암반 공학 분야에서 기계 학습의 잠재력은 레이저 스캐너 포인트 클라우드에서 암반 불연속 방향 및 간격을 추출하기 위한 기계 학습 기반 접근 방식을 조사한 Mammoliti et al. (2022)에 의해 입증되었으며, 이 연구에서 제안한 방법은 고전적인 컴퓨터 비전과 딥러닝 기술을 결합하여 포인트 클라우드에서 불연속성을 자동으로 식별하고 추출하는 것이었다. 이 접근 방식은 정확성과 계산 효율성 측면에서 기존 방법보다 효과적이었다. Zou et al. (2021)은 파노라마형 시추공 영상에서 암석구조 식별을 위해 클러스터링과 특성함수를 기반으로 한 자동 인식 방법을 제안하였으며, 이 방법은 Wudongde 수력발전소에서 얻은 고화질 이미지에 성공적으로 적용되었으며, 인식률은 약 90%, 정확도는 약 85%에 도달했다. 3차원 표면 모델에서 암반 불연속성 매개변수를 추출하기 위한 자동화 기술의 최근 개발에 대한 종합적인 개요를 제공하기 위해 Battulwar et al. (2021)은 암반 불연속 특성의 자동 추출에 대한 다양한 검토를 수행하였다. 이 연구에서는 방위, 간격, 지속성, 거칠기와 같은 다양한 기술의 장점과 한계를 분석하고 고품질 3D 데이터의 중요성, 표준화된 검증 방법의 필요성, 그리고 복잡한 불연속성 패턴을 감지하는 데에 현재 알고리즘의 한계를 보여주었다. 동시에 Yuan et al. (2022)은 광산 도로 굴착 작업에서 교차 절리 추적 식별을 위한 디지털 영상 처리 기반 자동 탐지 알고리즘을 제시하였다. 본 연구에서는 탐지 알고리즘을 개발하기 위해 이미지 전처리, 엣지 감지, 라인 피팅, 추적 인식을 포함한 종합적인 방법론을 제시했다. 이러한 기술의 또 다른 적용은 Menegoni et al. (2019)이 원격 조종 항공기 시스템(RPAS) 이미지에서 생성된 3D 고해상도 디지털 표면 모델을 사용하여 암반 불연속성을 탐지하고 기하학적으로 특성화하는 것을 목표로 수행한 연구에서 볼 수 있다. 이탈리아 오르메아(Ormea) 암반 사면에서 수행된 이 연구는 사진 측량 기술로 처리된 RPAS 획득 고해상도 이미지를 사용하여 3D 디지털 모델을 생성한 다음 방위, 지속성, 간격, 그리고 거칠기 등을 포함하여 암반 불연속성을 식별하고 특성화하는 데 사용되었다. RPAS 기반 접근 방식은 기존 현장 매핑 방법에 비해 보다 효율적이고 정확한 것으로 입증되었다. Nagendran et al. (2019)도 CloudCompare FACET 플러그인을 사용하여 지질 평면 추출에 사진 측량을 사용하는 유효성을 평가하고 결과를 기존의 정밀조사측량과 비교하였다. 이 연구에서는 FACET 플러그인과 스캔라인 측량을 사용한 사진 측량 접근 방식이 기존 정밀조사측량 방법에 비해 정확하고 해상도가 더 높은 지질 평면과 채석장 현장의 상세한 3D 모델을 생성한다는 사실을 발견하였다.
이러한 발전을 바탕으로 본 연구는 지질 암석 면의 경사각과 방향을 측정하기 위한 Roughness-CANUPO-Dip Filtration (R-C-D)라는 새로운 방법을 제안하고 평가하는 것을 목표로 한다. R-C-D 방법은 정확하고 효율적인 측정을 달성하기 위해 거칠기 분석, CANUPO 분석, 경사 필터링 및 면 세분화를 종합적인 작업 흐름에 결합한다. CANUPO (compact and non-uniform point cloud) 분석은 3차원 포인트 클라우드 데이터를 분류하기 위해 사용되는 방법 중 하나이다. 주로 레이저 스캐닝이나 LiDAR (light detection and ranging) 데이터를 분석할 때 활용되며, CANUPO는 개별 포인트들의 공간적 패턴을 분석하여, 주어진 포인트가 어떤 객체나 지형에 속하는지 분류하는 데 사용된다. 본 연구에서는 평면 피팅, 법선 벡터 변환, 면 세분화 및 나침반 측정의 네 가지 측정 방법을 평가하였다. 측정의 정밀도를 높이기 위해 본 연구에서는 법선 벡터 계산을 위한 최적의 LNR을 찾는 분석을 실시했다. R-C-D 방법의 주된 원리는 절리선을 제거하고 절리 근입점을 보존하여 면 세분화를 통해 절리면의 경사각과 방향을 얻는 것이다.
2. 현장 시험
2.1 현장 소개
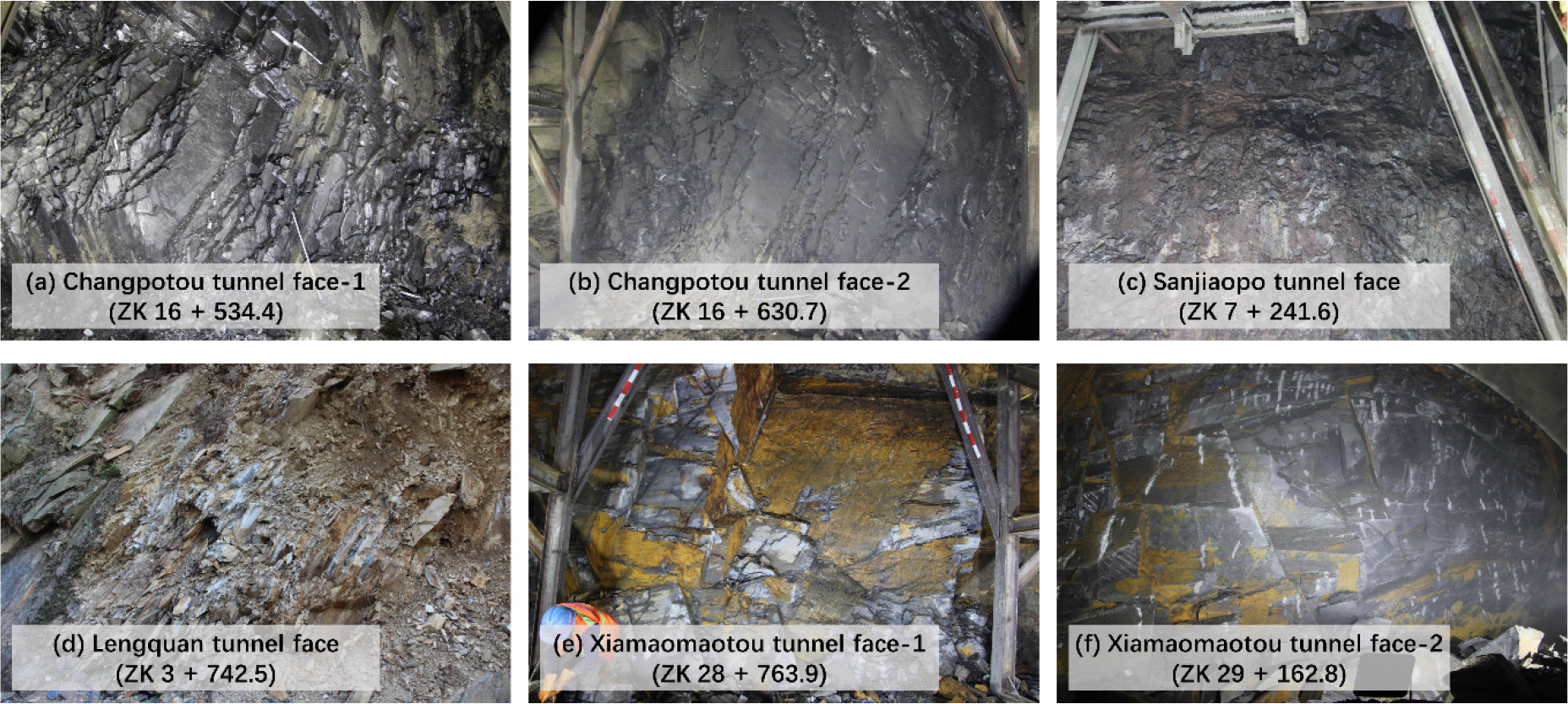
본 연구에서 언급한 프로젝트 현장은 중국 윈난성에 위치한 Mengzi-Pingbian 고속도로 터널이다. 고속도로의 길이는 40.25 km이며, 총 길이 14.8 km의 터널 13개가 포함되어 있다. 단일 터널의 최대 길이는 2.7 km이다. 터널 현장의 수문지질학적 조건은 복잡하고, 암석 풍화는 심하여 암석 표면이 광범위하게 박리되었다. 또한, 절리 균열이 상대적으로 뚜렷하여 서로 다른 막장 영역, 심지어 동일 막장의 서로 다른 영역에서도 암석의 거칠기 값에 큰 변화가 발생한다. 한편, 터널이 석회암 지역을 지나갈 때 카르스트 동굴, 높은 지압 등의 지역과 마주칠 수 있어 터널공사시 다양한 지질재해가 발생할 수 있다. 따라서 암석의 마찰 특성에 중요한 거칠기를 연구하는 것은 매우 중요하다. 터널 표면의 거칠기를 분석하기 위해 Changpotou-1 및 2, Sanjiaopo, Lengquan, Xiamaomaotou-1 및 2의 터널 막장을 포함하여 Fig. 1에서 보여주는 여러 일반적인 터널의 6개 막장 단면을 사례 연구로 선택하였다. 연구된 6개 터널의 주행거리(mileage)는 각각 ZK 16 + 534.4, ZK 16 + 630.7, ZK 7 + 241.6, ZK 3 + 742.5, ZK 28 + 763.9 및 ZK 29 + 162.8이다. 이러한 터널의 겉보기 균열 형상은 서로 다르고 암석 유형도 분명히 다르기 때문에 이는 의심할 여지없이 표면 거칠기 특성화에 큰 어려움을 가질 수 있다.
2.2 사진 측량 기반 이미지 수집
더 나은 3D 재구성 성능을 위해서는 여러 위치에서 촬영한 이미지가 암석 터널 막장을 완전히 포함해야 하며, 카메라 촬영 위치는 이미지 간 높은 수준의 중첩을 유지해야 한다. 합리적인 카메라 레이아웃은 이미지 품질, 촬영 범위 및 촬영 시간에 영향을 미칠 수 있으므로 매우 중요하다. Fig. 2에서는 4가지의 일반적인 사진 레이아웃 유형(발산형, 초점형, 균일형, 하이브리드)을 보여준다. 하이브리드 레이아웃과 균일 촬영(uniform photography)의 차이는 주로 이미지 캡처와 배열 방식에서 나타난다. 하이브리드 레이아웃은 다양한 방식의 촬영 방법과 구도를 결합한 배열로서, 여러 다른 촬영 기법이나 각도, 해상도, 그리고 센서를 함께 사용하여 데이터를 얻는다. 반면, 균일 촬영은 일정한 구도, 일정한 해상도, 일정한 촬영 간격을 유지하며 동일한 설정으로 이미지를 캡처하는 방식이다. 하이브리드 레이아웃은 특정 조건에 맞춰 배열을 조정할 수 있다. 예를 들어, 특정 영역에서는 고해상도의 집중적인 촬영을 하고, 덜 중요한 영역에서는 낮은 해상도로 촬영하는 방식으로 설정할 수 있다. 하지만 균일 촬영은 모든 카메라가 동일한 설정으로 배열되기 때문에 전체적으로 균일한 이미지를 얻을 수 있다. 또한 하이브리드 레이아웃은 여러 각도나 센서를 이용하기 때문에 더 다양한 정보를 얻을 수 있으며, 이 정보는 객체의 3D 모델링, 움직임 추적, 또는 환경 변화 모니터링 등 다양한 용도로 활용된다. 하지만, 균일 촬영은 데이터의 일관성이 높기 때문에 분석 및 처리 과정이 비교적 간단하며, 주로 변화 감지나 간단한 객체 인식에 많이 사용된다. 전반적으로 하이브리드 레이아웃은 카메라 위치 이동을 최소화하면서 상대적으로 크고 균일한 촬영 범위를 보장할 수 있으며, 절리면이 포함된 암반에서 그림자진 절리면을 찾기 위해서 적합하다. 따라서 본 연구에서는 암석 터널 막장의 영상데이터를 수집하기 위해 하이브리드 레이아웃 방법을 사용하였다.

2.3 SfM 기반 3D 재구성
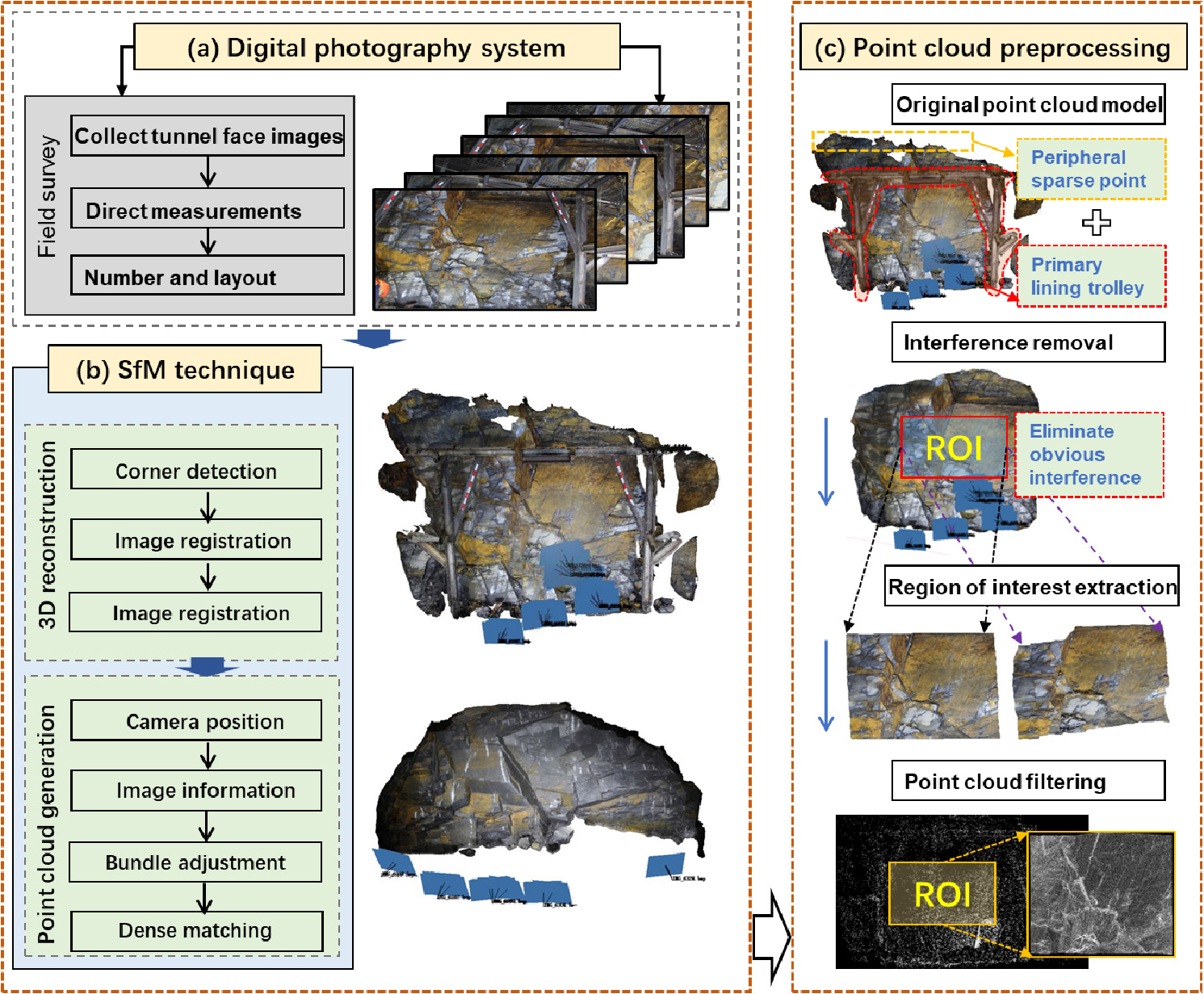
여러 각도에서 획득한 영상부터 포인트 클라우드 분석까지 본 연구의 전체 과정을 Fig. 3에 나타내었다. Xiamaotou 터널 막장-1을 예로 사용하여 다양한 각도에서 막장의 영상 데이터를 획득하였다. 그런 다음, SfM 기반 방법은 여러 개의 중첩 이미지를 사용하여 카메라의 방향 변수를 계산하고 추가 변수 보정을 피하기 때문에 효율적인 3D 재구성 접근 방식(Fig. 3(b) 참조)으로 나타냈다(Westoby et al., 2012). 지상 기준점은 연구 대상에 배치하거나 연구된 장면에서 선택할 수 있으므로 서로 다른 이미지의 특징점을 지상 기준점으로 채택할 수 있다(Dandois and Ellis, 2010). 본 연구에서는 암석 터널 막장의 3차원 포인트 클라우드 모델을 재구성하기 위해 MATLAB 프로그램을 사용하였다. 주요 프로세스는 Fig. 3(b)에 설명되어 있으며 다음의 단계들 포함한다. (1) 사용된 각 원본 2D 이미지에서 중요한 지점을 식별한 다음 중첩된 이미지에 일치시킨다. (2) 반복적인 번들 조정(bundle adjustment) 알고리즘을 적용하여 각 이미지의 카메라 변수를 추정하고, 이러한 임계점의 3D 위치를 계산하여 초기 분산된 3D 포인트 클라우드를 구축한다. (3) Multi-View Stereo 기술을 사용하여 3D 포인트 클라우드를 구성한다. (4) 기준 시스템에서 포인트 클라우드의 크기를 조정하고 방향을 지정하기 위해 지상 기준점(또는 인식 가능한 점)을 사용한다. (5) 재구성된 3D 포인트 클라우드 데이터 세트를 출력한다. 연속해서, 원본 포인트 클라우드 데이터에서 간섭을 제거하고 영역 ROI를 묘사하는 것을 통해 거칠기 연구를 위한 입력 데이터가 결정된다.
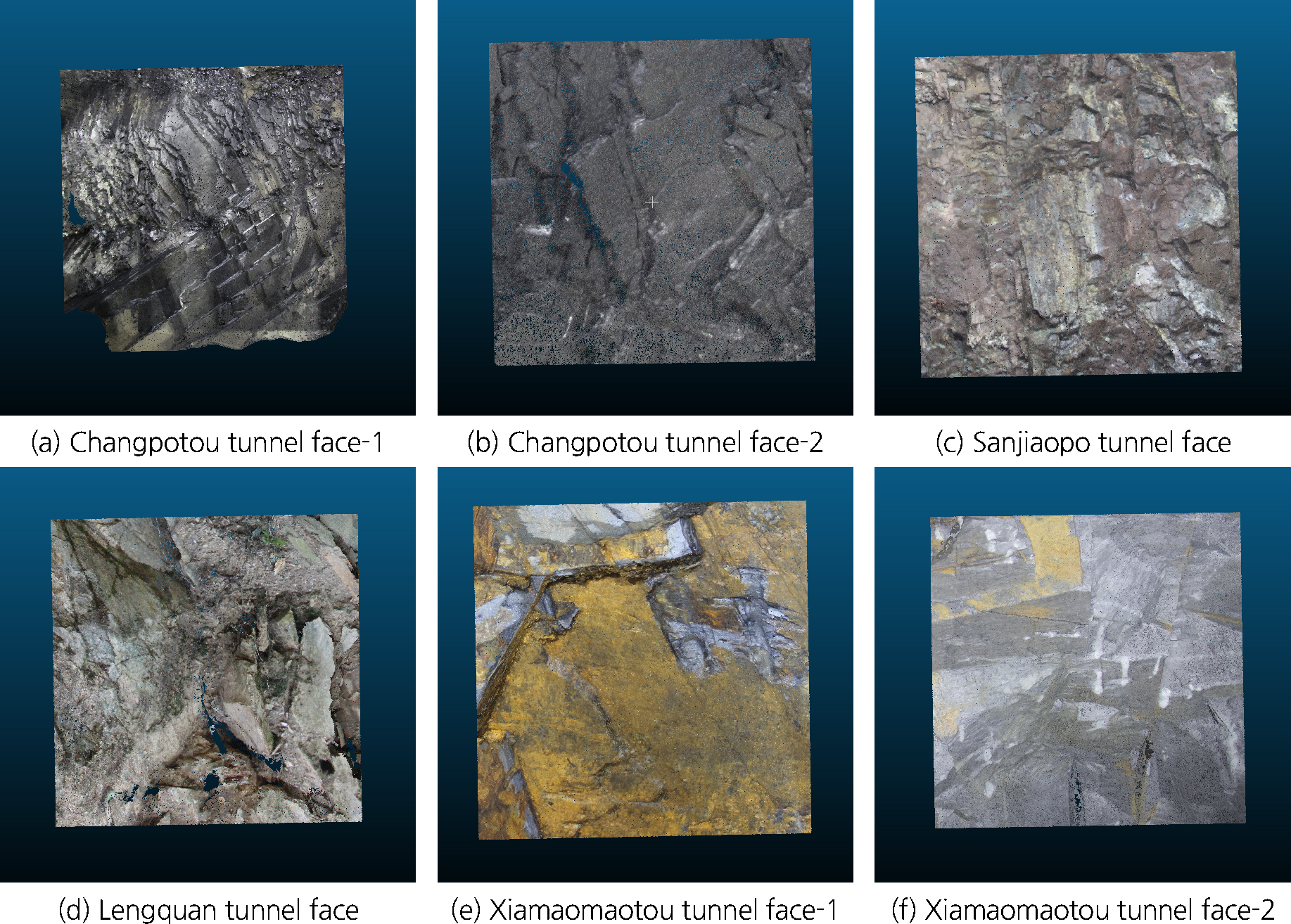
3D 재구성 후 얻은 6개 현장의 포인트 클라우드 데이터는 Fig. 4에 나타나 있다. Fig. 4(a) and (b)에서 보는 바와 같이 Changpotou 현장의 터널 막장은 절리와 암반이 뚜렷이 구별되는 것을 볼 수 있다. Sanjiaopo 현장의 터널 막장은 암석 표면이 거칠고 절리가 분명하게 보이지 않는다(Fig. 4(c) 참조). Lengquan 현장의 터널 막장에는 Fig. 4(d)와 같이 임의의 방향으로 절리가 있다. Xiamaomaotou 터널은 암석 표면이 편평하고 절리수가 Changpotou 터널에 비해 적다(Fig. 4(e) and (f) 참조). 각 현장마다 암석의 종류가 다르고, 거칠기의 모양과 간격도 다른 것을 알 수 있다.
3. 방법론
3.1 최적의 경사각 및 방향 측정법 선정
경사각과 방향의 정확한 측정은 지질 구조를 이해하고 지질학적 재료의 거동을 예측하는 데 중요하다. 경사각과 방향을 측정하는 네 가지 방법인 평면 피팅, 법선 벡터 변환, 면 세분화, 나침반 측정을 평가하였다. 평면 피팅(plane fitting)은 최소 제곱법(least squares method)을 사용하여 각 점의 좌표와 가장 가까운 평면을 구한 후, 이 평면의 기울기와 방향을 통해 경사각과 경사방향을 계산한다. 평면의 법선 벡터를 추출하고, 이를 이용하여 평면과 지면 사이의 각도를 경사각으로 산정한다. 이 방법은 여러 점들로부터 최적의 평면을 추정하기 때문에, 노이즈가 있거나 복잡한 데이터에서도 안정적으로 경사각을 계산할 수 있다. 법선 벡터 변환(normal vector conversion)은 각 점에 대해 법선 벡터를 계산한 후, 이 벡터의 방향과 지면과의 각도를 비교하여 경사각을 구한다. 이러한 법선 벡터는 인접한 점들의 분포를 기반으로 계산되며, 표면이 복잡할수록 더 정밀한 결과를 도출할 수 있다. 법선 벡터는 표면의 기울기와 방향을 직관적으로 나타내므로, 경사각 계산이 매우 효율적이며 복잡한 지형에서도 활용도가 높다. 면 세분화(facet segmentation)는 3D 포인트 클라우드 데이터를 세분화하여 작은 면으로 구분하고, 각 면에서 경사각과 방향을 개별적으로 계산한다. 이를 통해 곡면이나 불규칙한 형태의 지형에서도 보다 정밀한 경사각 분석이 가능하다. 이 방법은 복잡한 구조나 표면에서 면 단위로 상세한 경사 정보를 얻을 수 있으며, 다양한 스케일에서 경사 분석이 가능해 높은 정밀도를 제공한다. 나침반 측정(compass measurements)은 먼저 3D 포인트 클라우드 데이터나 메시에서 측정하려는 면이나 점을 선택한다. 즉, 임의의 지점을 선택하거나, 특정 영역을 선택해서 경사 측정을 시작할 수 있다. 선택한 지점에서 해당 지점의 표면에 수직으로 서 있는 법선 벡터를 계산한다. 이 법선 벡터는 해당 지점의 기울기 및 방향을 나타내며, 나침반 도구는 이 법선 벡터를 이용해 경사각과 방향을 구한다.
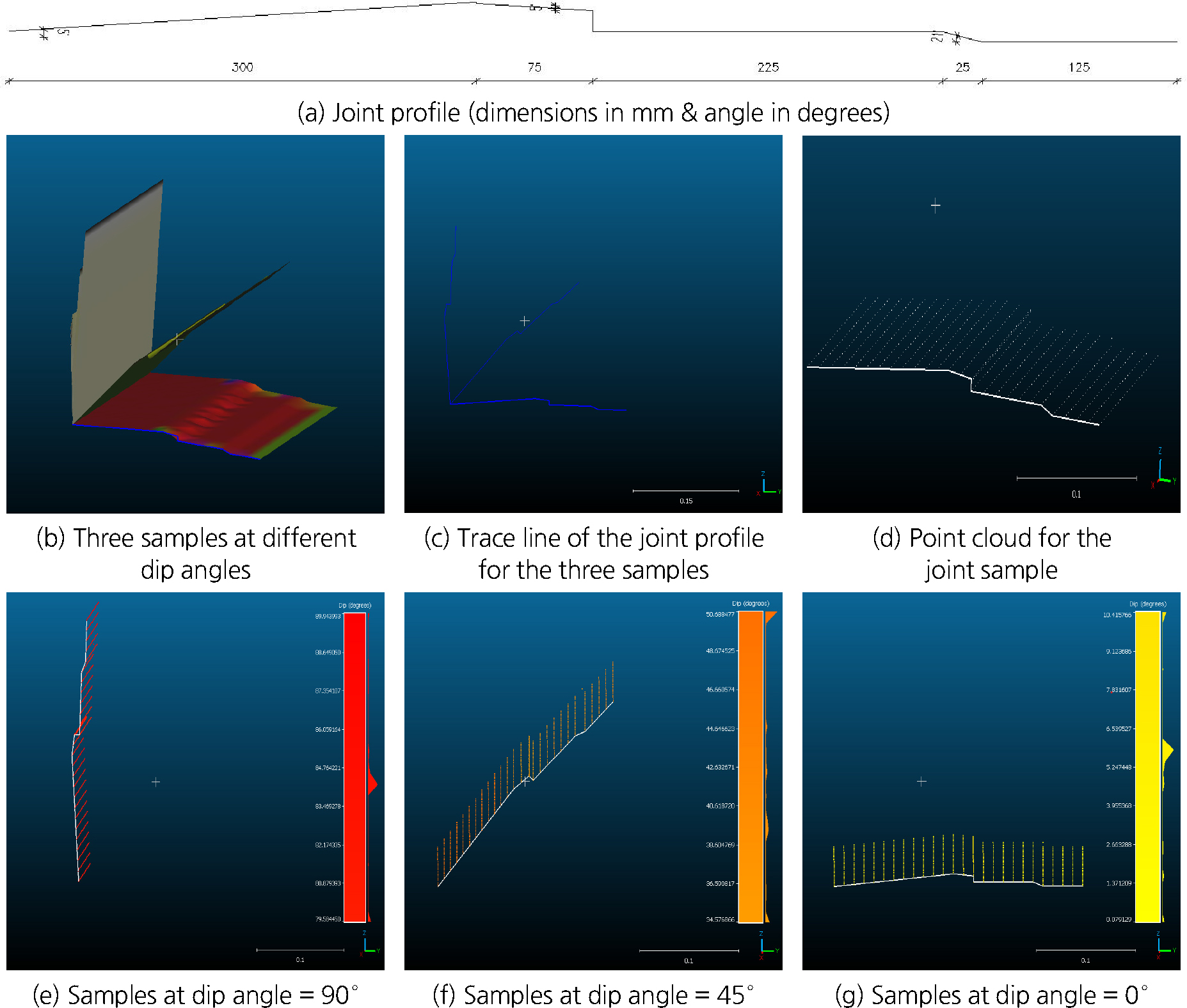
본 연구에서는 제안된 방법의 적절성을 검증하기 위해 가상의 절리를 생성하여 이미 알고 있는 절리의 기하학적 구조와 방위를 사용하여 가상 포인트 클라우드를 생성하였으며, 경사각과 방향은 4가지 측정 방법을 사용하여 계산하였다. 측정된 결과를 실제 값과 비교하고 각 방법의 정확성과 정밀도를 평가하였다. 사용된 경사각 및 방향 측정 방법은 평면 피팅, 법선 벡터 변환, 면 세분화 및 나침반 측정이다. Table 1은 경사각 및 방향을 계산하기 위해 사용된 네 가지 방법에 대한 검증 결과를 요약한 것이며, 절리 샘플의 실제 경사각과 방향은 각각 0°/0°, 45°/180° 및 90°/180°였다(Fig. 5 참조).
Table 1.
Verification results for the method used to calculate dip angle & direction
평면 피팅 방법은 평면을 포인트 클라우드의 데이터 포인트에 맞추는 방법이며, 포인트 클라우드의 각 포인트들에서 가장 가까운 하나의 평면을 피팅한 것이다. 이후 경사각과 방향은 맞춰진 평면의 방위를 기준으로 계산하게 된다. 평면 피팅 방법의 결과, 경사각과 방향 모두 최대 편차가 1°로, 계산된 경사각 및 방향 값이 예상 값에 근접한 것으로 나타났다. 법선 벡터 변환 방법은 포인트 클라우드 내 각 점의 법선 벡터를 계산한 후 법선 벡터를 경사각 및 방향 값으로 변환하는 방법이다. 법선 벡터 변환 방법의 결과, 계산된 경사각과 방향 값은 경사각의 최대 편차가 0.45°, 경사 방향의 최대 편차가 0.36°로 예상 값에 근접한 것으로 나타났다. 면 세분화 방법은 포인트 클라우드를 개별 면으로 분할한 다음 각 면의 경사각과 방향을 계산하는 방법이다.
면 세분화 방법의 결과, 계산된 경사각 및 방향 값은 경사각의 최대 편차가 1.03°, 경사 방향의 최대 편차가 1°로 예상 값에 매우 근접한 것으로 나타났다. 나침반 측정은 나침반을 사용하여 포인트 클라우드의 경사 방향을 측정하는 방법이다. 나침반 측정 방법의 결과, 계산된 경사 방향 값은 최대 편차가 1°로 예상 값과 매우 근접한 것으로 나타났다. 그러나 이 방법에는 광범위한 수동 개입이 필요하므로 심각한 측정 오류를 유발할 수 있다. 평면 피팅, 법선 벡터 변환, 면 세분화 방법 역시 수동적인 작업에 의해 평면을 구성하거나 벡터의 방향을 산정하거나 면을 세분화 하지만 한번의 수동적 개입 이후 경사각 및 경사 방향을 바로 산정할 수 있다.
결과는 모든 측정 방법이 99.4%에 달하는 정확도로 경사각을 정확하게 계산할 수 있음을 보여주었다. 다양한 방법으로 얻은 경사각 및 방향 값은 기준 값과 거의 일치하였고, 본 연구에서는 자동 특성 측정이 가능한 면 세분화 방법을 최적의 측정 방법으로 선택하였다. 다른 방법인 나침반 측정, 평면 피팅 및 법선 벡터 변환은 수동으로 적용해야 하기 때문에 사용자에 따라 오차의 범위가 크며 대형 모델의 경우 심각한 오류를 유발할 수 있는 반면 면 세분화 방법은 수동 개입 없이도 정확한 결과를 제공할 수 있었다.
3.2 포인트 법선 계산을 위한 LNR 최적화
법선 벡터 계산에 사용되는 최적의 LNR (local neighbor radius)을 추정하기 위한 검증을 수행하였다. 이 검증 결과는 나침반 방법을 통해 산정한 결과와 하여 비교하였다. 기준 평면은 53°의 경사각과 61°의 경사 방향을 가졌다. 0.01 m에서 0.035 m까지의 LNR 값 범위를 0.005 m 간격으로 변화하여 최적의 LNR을 찾기 위한 분석을 실시하였고, Fig. 6은 LNR에서 평가된 절리대의 위치를 보여준다. 각 LNR 값에 대해 기준면 값에 도달한 점들의 백분율을 계산하고 그 결과를 Fig. 7의 시각화와 함께 Table 2에 나타냈다.
Fig. 7(a)는 LNR 값 0.01에 대한 법선 벡터 계산 결과를 보여준다. 기준 평면의 경사각은 53°이고 경사 방향은 61°이다. 그림에서는 점들의 48.18%만이 기준 평면과 일치하는 경사각을 가지고 있음을 보여준다. 이는 LNR 값 0.01이 법선 벡터를 정확하게 계산하는 데 충분하지 않음을 나타낸다. Fig. 7(b)는 LNR 값 0.015에 대한 법선 벡터 계산 결과를 보여주며, 그림에서는 점들의 55.32%가 기준 평면과 일치하는 경사각을 갖고 있음을 보여준다. 이는 LNR 값을 0.01에서 0.015로 늘리면 법선 벡터 계산의 정확도가 향상됨을 의미한다. Fig. 7(c)는 LNR 값 0.02에 대한 법선 벡터 계산 결과를 보여주며, 그림에서는 점들의 68.32%가 기준 평면과 일치하는 경사각을 갖고 있음을 보여준다. 이는 LNR 값을 0.015에서 0.02로 늘리면 법선 벡터 계산의 정확도가 더욱 향상됨을 나타낸다. Fig. 7(d)는 LNR 값 0.025에 대한 법선 벡터 계산 결과를 보여주며, 그림에서는 점들의 84.63%가 기준 평면과 일치하는 경사각을 갖고 있음을 보여준다. 이는 LNR 값을 0.02에서 0.025로 증가시키면 법선 벡터의 계산 정확도가 크게 향상됨을 의미한다. Fig. 7(e)는 LNR 값 0.03에 대한 법선 벡터 계산 결과를 보여주고, 그림에서는 점들의 96.93%가 기준 평면과 일치하는 경사각을 갖고 있음을 보여주며, 정확도가 더 향상됨을 나타낸다. Fig. 7(f)는 LNR 값 0.035에 대한 법선 벡터 계산 결과를 보여주며, 그림에서는 점들의 100%가 기준 평면과 일치하는 경사각을 갖고 있음을 보여준다. 이는 LNR 값을 0.03에서 0.035로 증가시키면 계산된 법선 벡터와 기준 평면이 완전히 일치한다는 것을 의미한다.
LNR 값이 증가할수록 기준 평면 값에 도달한 점들의 백분율이 증가하였다. LNR 값이 0.01인 경우 점들의 48.18%만이 기준 평면과 일치하는 경사각을 가졌고, LNR 값이 0.035인 경우 포인트의 100%가 기준 평면과 일치하는 경사각을 가졌다. 마찬가지로 경사 방향의 경우 기준 평면과 일치하는 점의 비율은 LNR 값 0.01의 경우 57.79%에서 LNR 값 0.035의 경우 61%로 증가하였다. 이러한 결과는 법선 벡터를 계산하는 데 사용되는 LNR 값이 결과의 정확도에 상당한 영향을 미칠 수 있음을 나타낸다. LNR 값이 증가할수록 기준 평면과 일치하는 점들의 비율도 증가하므로, LNR 값이 클수록 더 정확한 결과를 얻을 수 있음을 나타낸다. 그러나 더 큰 LNR 값을 사용하면 법선 벡터를 계산하는 데 필요한 계산 시간 역시 LNR 값에 거의 비례하여 늘어나게 된다. 따라서 LNR 값을 선택할 때 정확도와 계산 효율성 사이의 균형을 맞출 필요가 있다. 그림 7의 결과에서 보았듯이 LNR의 변화는 굴곡 및 거칠기가 있는 포인트 클라우드의 표면에서의 경사 방향 및 경사각을 산정하는 영역이 변화하는 것이기 때문에 결과에 영향을 미친다.
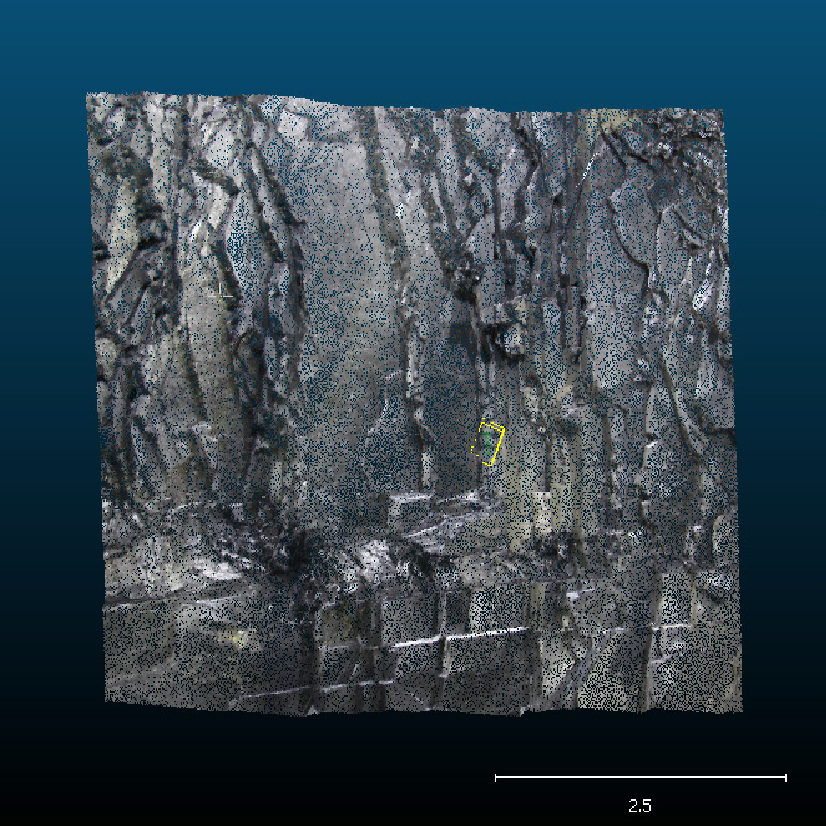
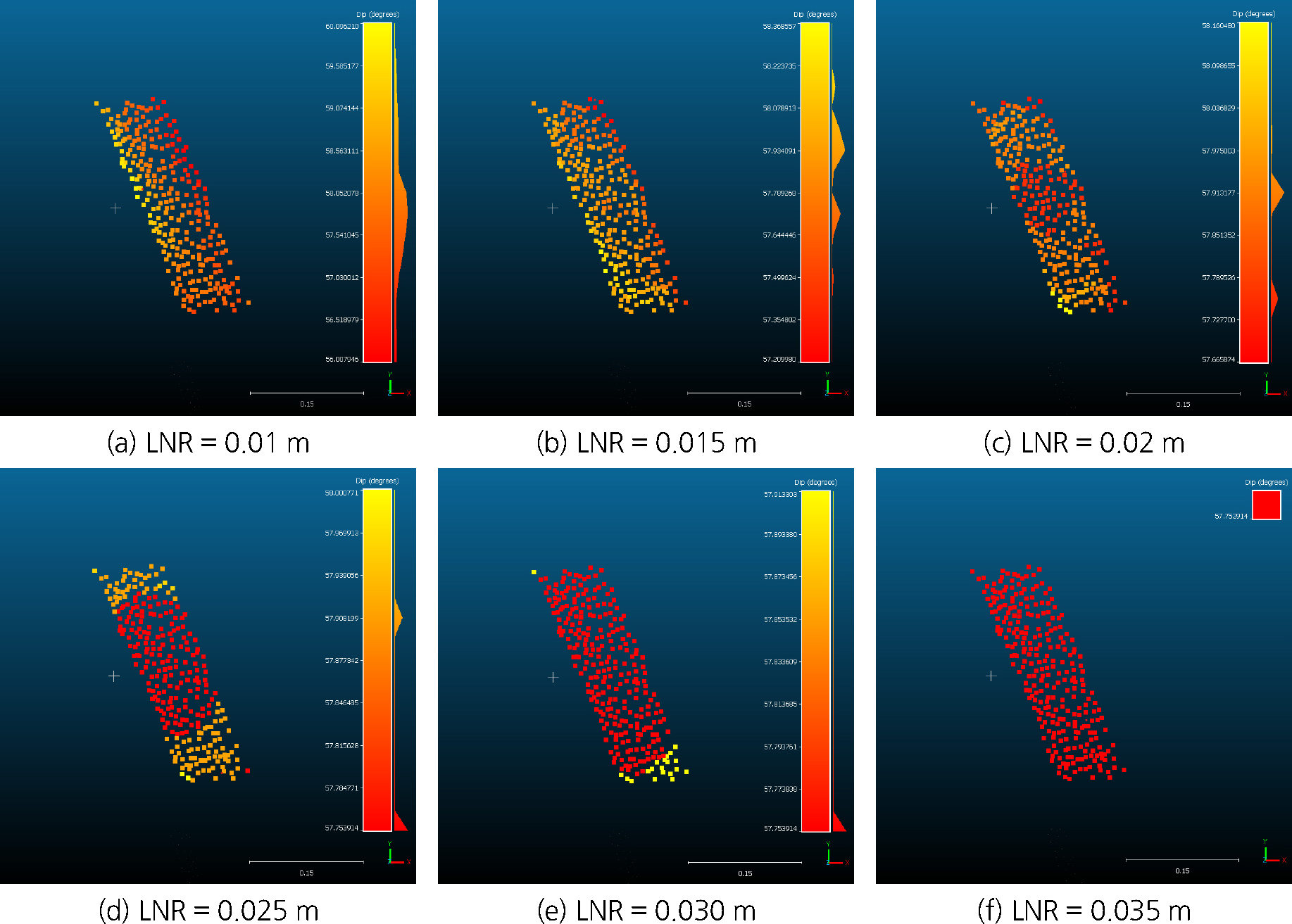
Table 2.
Results optimizing LNR for geometrical analysis
3.3 필터링 경사각 최적화
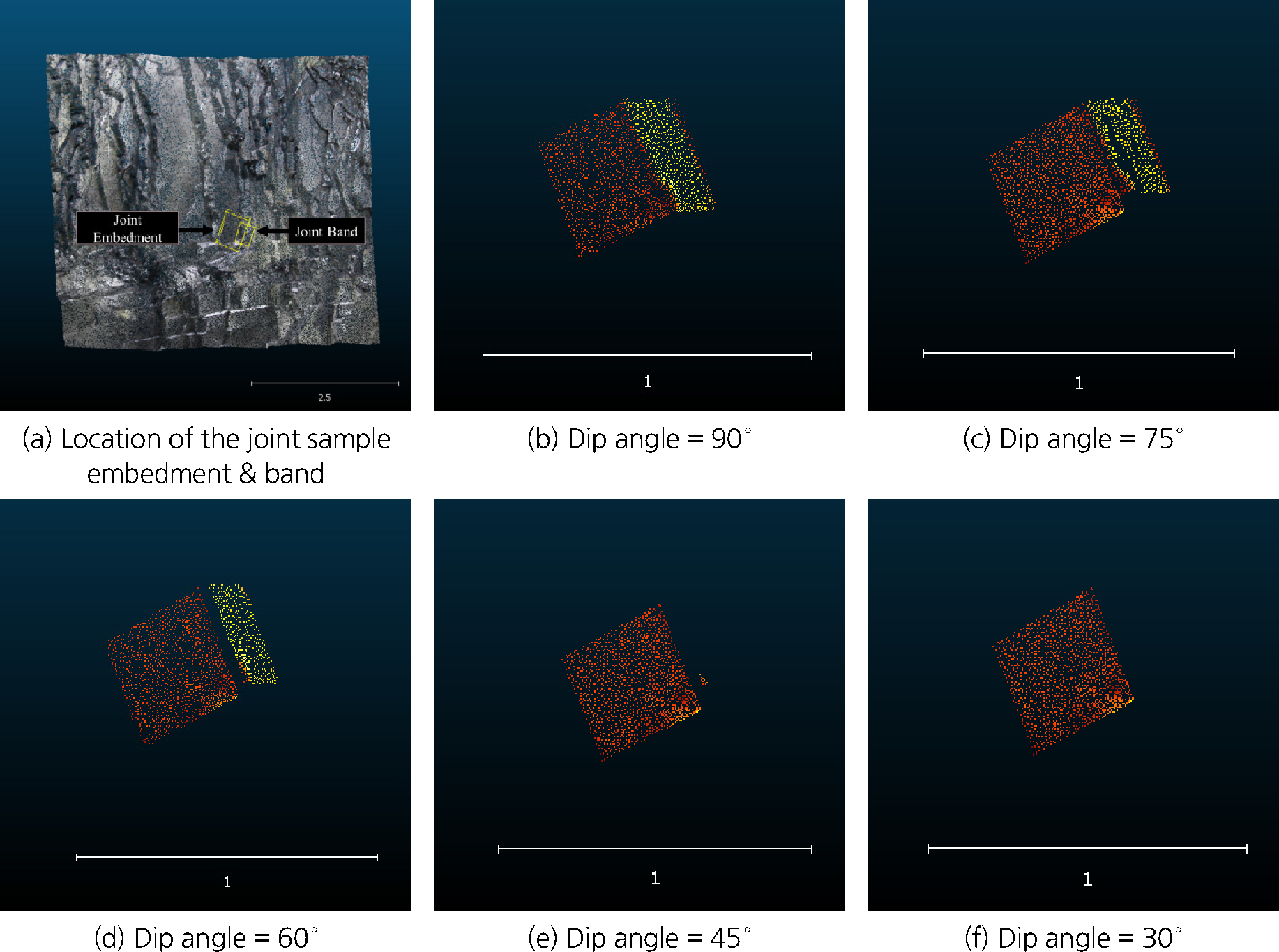
절리암대를 나타내는 점들을 필터링하는데 사용되는 경사각을 추정하기 위해 추가 검증을 수행하였다. 30°에서 90°까지의 경사각 범위를 나누어 분석하였으며, 각 각도에 대해 절리암 연결 지점(절리대)과 절리암 근입 지점의 수를 기록하였다. 제거된 절리암 연결점과 남은 절리암 근입 지점의 비율도 각 경사각에 대해 계산되었다. 경사각 최적화를 위한 기하학적 분석 결과는 Table 3에 제시되어 있으며, Fig. 8(b)~(f)는 데이터를 시각적으로 표현한 것이다. 분석에 사용된 원본 포인트 수는 절리암 연결의 경우 550, 절리암 근입의 경우 1,400이었다. Fig. 8(b)는 경사각 90°에 해당한다. 필터링 처리 결과 Table 3에서 보는 바와 같이 절리대 지점들은 하나도 제거되지 않았으며, 절리암 근입이 남아있는 비율은 100%로 이 각도에서 절리대층이 온전함을 알 수 있다. Fig. 8(c)는 경사각 75°에 해당하며, 결과는 남아있는 절리암 근입 비율이 100%임을 보여준다. 그러나 절리대 지점들 중 19% 만이 제거되어 절리대층이 대부분 절리 근입으로 손상되지 않았음을 나타낸다. Fig. 8(d)는 절리대층이 절리대 지점들의 상당 부분이 제거되어 부분적으로 손상되지 않았음을 보여준다. 60°의 경사각에서 필터링 처리는 절리대 지점들의 22.2%를 제거하고 절리암 근입의 남은 비율은 93.8%이었다. Fig. 8(e)는 45° 경사각에 해당하며, 이 경사에서 필터링은 절리대 지점들의 98.4%를 제거한 반면 절리암 근입 지점들의 92.14%는 여전히 남아 있다. 이는 암석층이 두 개 또는 그 이상의 세그먼트로 크게 세분화되어 절리대 중 극히 일부만 남았음을 의미한다. Fig. 8(f)는 30° 경사각을 보여주며, 필터링 처리를 통해 모든 절리대 지점들이 성공적으로 제거되었으며, 경사각이 증가하면 절리대 지점 수가 감소하고 절리암 근입 지점 수가 증가함을 나타낸다. 경사각 30°에서는 절리암 연결점이 모두 제거되어 절리암 근입점이 100% 남게 되었다. 그러나 이로 인해 원본 포인트 클라우드 데이터 세트의 78.6%가 제거되는 등 상당한 데이터 손실이 발생하였다. 따라서 최대로 절리 근입점들을 유지하면서 모든 절리대 지점들을 효과적으로 제거할 수 있는 최적의 경사각은 45°이다. 필터링에 사용된 최종 경사각과 연구에 사용된 세 가지 현장 모델의 LNR 최종 값은 Table 4와 같다. 결과는 포인트 법선들을 계산하기 위한 필터링 경사각 및 LNR의 최적값을 나타낸다. 따라서 Changpotou 터널 막장-1 (face-1)의 경우 필터링 경사각은 45°로 선정되었고 LNR은 0.030 m로 설정되었다. Changpotou 터널 막장-2 (face-2)의 경우 필터링 경사각은 30°로 선정되었으며, LNR은 0.65 m로 매우 거친 표면을 나타낸다. Xiamaomaotou 터널 막장 2 (face-2)의 경우 필터링 경사각은 45°로 선정되었으며 LNR은 0.075 m로 설정되었다.
Table 3.
Results optimizing dip angle used for geometrical analysis
4. R-C-D 방법
R-C-D 방법은 거칠기 분석, CANUPO 머신러닝 알고리즘, 경사각 필터링(dip filtration) 방법이 결합된 방법으로, 각 방법의 분석과정을 거치면서 절리면이 포함된 암반의 포인트 클라우드 데이터에서 절리면만을 추출해 낼 수 있는 방법이다. R-C-D 방법은 각 방법의 분석과정을 거치면서 절리면에 해당하는 포인트들은 필터링하여 제거되며, 최종적으로 절리면을 제외한 암반의 표면만을 감지하여 암반표면의 경사각과 방향을 확인할 수 있다.
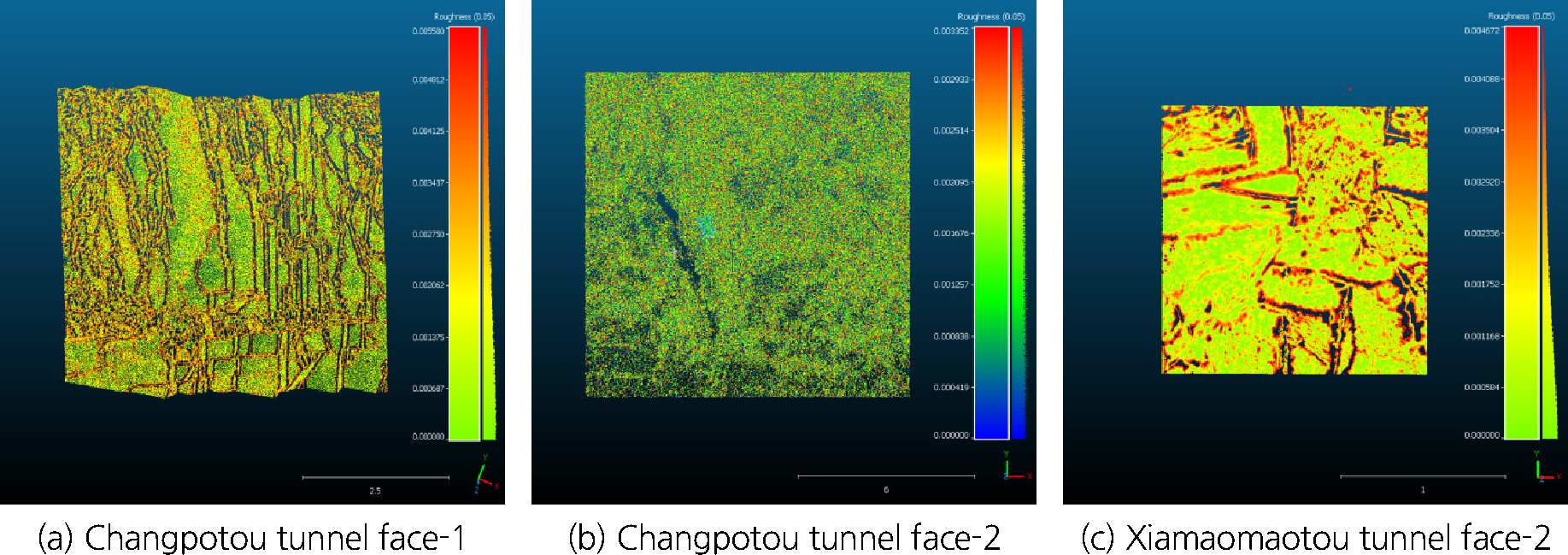
거칠기 분석은 Fig. 9와 같이 Changpotou 터널 막장-1, Changpotou 터널 막장-2 및 Xiamaotou 터널 막장-2를 포함하는 3개 현장 모델에 대해 수행되었다. 이 분석의 목적은 절리 근입 면의 점들을 유지하고 그 경사각과 방향을 얻기 위해 절리면들을 식별하고 제거하는 것이다. 이 방법의 기본적인 원리는 절리의 거칠기와 암반 표면의 거칠기가 다르다는 것에서 착안되었다. 따라서, 거칠기 분석을 통해서 거칠기 히스토그램 상에서 거칠기가 낮은 암반표면의 포인트들은 유지하고 거칠기가 더 거친 절리면 포인트들을 제거할 수 있다. 앞선 최적의 파라메타 산정에서 얻은 결과를 바탕으로 최적의 LNR은 3개 현장 모델 모두에서 0.05 m로 결정되었다. Fig. 9(a)~(c)에서는 거칠기의 히스토그램이 나타나 있으며, 본 연구에서는 절리와 절리를 제외한 암반의 포인트를 구분하기 위한 최적 거칠기 필터링 비율(%)을 산정하였다. 이 결과 Changpotou 터널 막장-1의 경우 이 히스토그램에서 약 70% 이상에 해당하는 포인트들을 삭제하였으며, 이는 거칠기 값이 약 0.005577 m에 해당한다. Changpotou 터널 막장-2의 경우 히스토그램에서 약 48% 이상에 해당하는 포인트들을 삭제하였으며, 이는 거칠기 값이 0.003352 m에 해당한다. Xiamaotou 터널 막장-2는 히스토그램에서 87% 이상에 해당하는 포인트들을 필터링하였으며, 이는 거칠기가 약 0.004672 m정도이다. Changpotou 터널 막장-1과 Xiamaotou 터널 막장-2의 결과는 유사하며, Changpotou 터널 막장-2경우 낮은 필터링 비율을 보여줬다. Fig. 9(a) and (c)에서 보이는 것과 같이 두 막장면은 암반 표면의 거칠기가 거칠지 않은 반면 절리면의 거칠기가 거칠어 두 지질학적 구조의 특정이 명확히 구별된다. 하지만 Changpotou 터널 막장-2의 경우 Fig. 9(b)에서 보는 것과 같이 암반 표면의 거칠기가 거칠어 절리의 거칠기와 큰 차이를 보이지 않기 때문에 절리면뿐만 아니라 암반표면에 해당하는 포인트들도 함께 제거되게 된다. Fig. 9의 결과 세 막장에서 70%, 48%, 87% 이상에 해당하는 포인트들을 필터링함으로써 절리면을 제외한 암반 표면에 해당하는 포인트들이 많이 잔존하게 될 뿐만 아니라 추후에 수행되는 분석의 정확도를 증진시키고 분석시간을 감축시킬 수 있다.
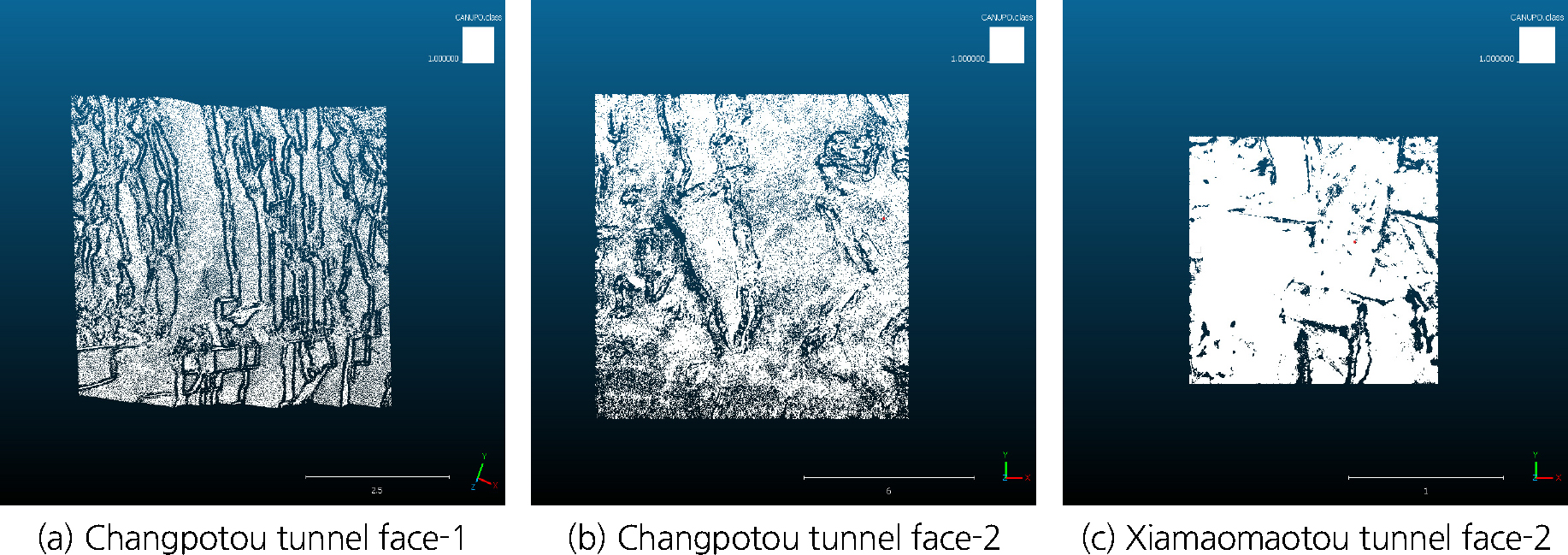
거칠기 분석 후에 절리면만을 추출하기 위해 CANUPO 머신러닝 분석을 수행하였으며, 추출된 절리면을 통해 절리면의 경사각과 방향을 얻을 수 있다. CANUPO 분류 머신러닝 알고리즘은 3개 현장 모델(Changpotou 터널 막장-1, Changpotou 터널 막장-2, Xiamaomaotou 터널 막장-2)에 적용되어 암석면과 절리면으로 구분하여 두 가지 카테고리 모두에 대해서 훈련을 실시하여 훈련된 포인트 클라우드의 데이터를 구축하였다. 알고리즘은 지정된 위치와 규모에서 각 지점 주변의 포인트 클라우드 차원과 포인트 클라우드 형상에 대한 다중 규모 측정을 사용하여 각 포인트를 분류하였다. 각 스캔 위치의 각 지점에 대한 분류 분리성, 공간 해상도 및 분류의 확률적 신뢰도 또한 계산하였다.
CANUPO 분석 결과는 Fig. 10에 나와 있으며, 추가 절리선 제거를 보여준다. Fig. 10은 Changpotou 터널 막장-1, Changpotou 터널 막장-2, Xiamaomaotou 터널 막장-2에 대한 R-C 해석 결과를 각각 보여준다.
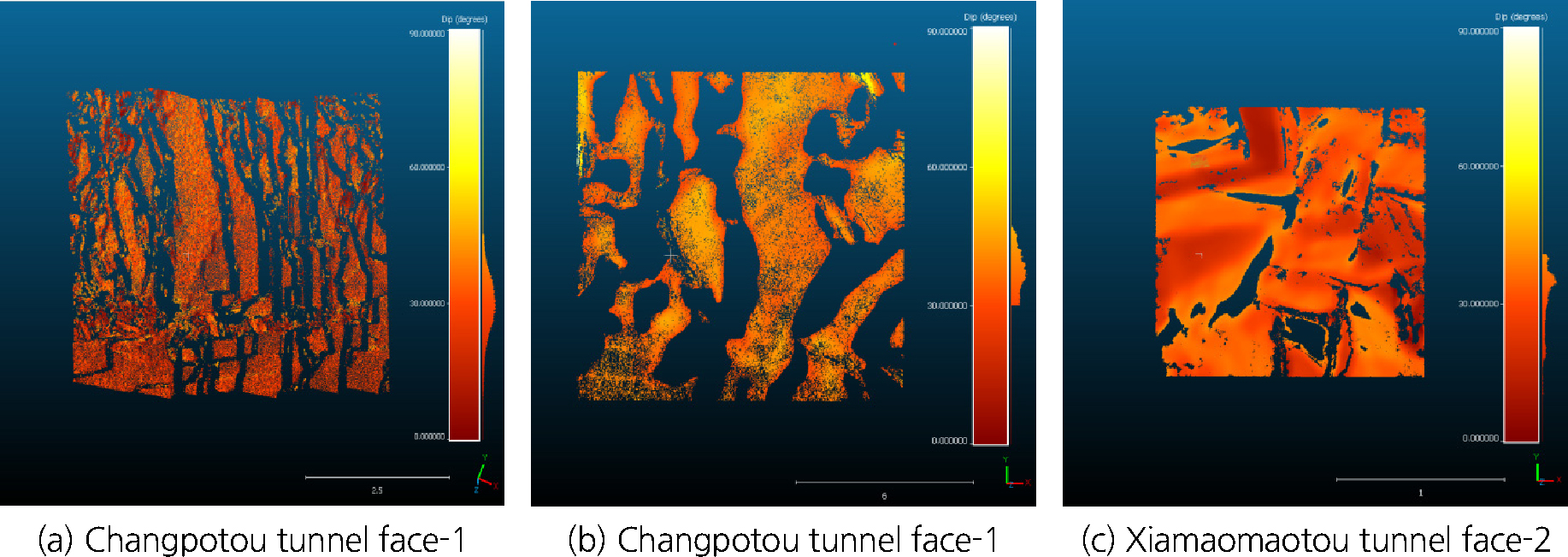
본 연구에서는 절리대를 더 명확히 제거하기 위해서 경사각 필터링을 사용하였으며, 암반 표면의 법선 방향은 경사 및 경사방향으로 변환되어 경사각 필터링을 적용할 수 있다. Fig. 11에서 볼 수 있듯이 경사각 필터링은 현장 모델에서 절리대를 성공적으로 제거하였다. 이것은 절리대와 암반의 표면이 이루는 각도가 명확히 다르기 때문이다. 일반적으로 절리대와 암반의 표면은 직각을 이루기 때문에 절리대를 제거하기 위해서 경사각 필터링은 매우 효과적인 방법이라고 할 수 있다. 대부분의 암반이 동일한 방향을 가지고 있으며, 절리대의 경사각은 이와 큰 차이를 보이므로 경사각 필터링에 사용된 임계값이 이 둘의 차이를 통해 설정될 수 있다.
각 터널 막장면의 절리 근입부에 걸친 경사각과 경사 방향의 변화는 터널 주변 암반의 지질 구조에 관한 중요한 정보를 제공한다. 이러한 특성들을 이해하는 것은 터널의 안정성을 평가하고 지하 구조물의 안전과 수명을 보장하기 위한 적절한 보강 조치를 결정하는 데 중요하다. 또한, 절리 근입부에 대한 분석을 통해 얻은 데이터는 향후 터널 프로젝트의 설계 및 건설에 정보를 제공하는 데 사용될 수 있으며, 복잡한 지질 구조에서 지하구조물의 굴착을 위한 보다 효율적이고 비용 효율적인 전략 개발을 촉진할 수 있다.
5. 결 론
1. 경사각 및 방향을 측정하는 네 가지 방법을 평가한 결과 모든 측정 방법이 경사각을 정확하게 계산할 수 있는 것으로 나타났다. 그러나 면 세분화 방법은 수동 개입 없이 자동 특성과 정확성으로 인해 최적의 측정 방법으로 선택되었다.
2. 로컬 인접 반경(local neighbor radius, LNR)은 법선 벡터 계산에 최적화되었으며, LNR 값이 클수록 더 정확한 결과를 얻을 수 있지만 계산 시간도 늘어난다. LNR 값을 선택할 때 정확성과 계산 효율성 사이의 균형을 맞출 필요가 있다. 법선 벡터를 계산하는 데 사용된 최적 로컬 인접 반경(LNR)은 현장 모델의 지질 표면 특성에 따라 0.075 m, 0.03 m 및 0.65 m로 결정되었다.
3. 추가 지점들을 필터링하고 제거하는 데 사용되는 경사각의 최적화도 수행되었다. 그 결과, 경사각이 증가할수록 절리대 지점의 수가 감소하고 절리암 근입 지점의 수가 증가하는 것으로 나타났다. 경사각의 최적값은 Changpotou 터널 막장-1과 Xiamaomaotou 터널 막장-2에서 45°, Changpotou 터널 막장-2에서 30°인 것으로 나타났다. 이 검증 결과, 법선벡터 계산에 사용된 LNR 값이 결과의 정확도에 큰 영향을 미치는 것으로 나타났다. LNR 값이 클수록 더 정확한 결과를 얻을 수 있지만 법선 벡터를 계산하는 데 필요한 계산 시간도 늘어난다. 이러한 결과는 이 주제에 대한 이전 연구와 일치하며 정확성과 계산 효율성의 균형을 맞추기 위해 적절한 LNR 값을 선택하는 것이 중요하다는 것을 강조한다.
4. Roughness-CANUPO-Dip Fitration (R-C-D) 방법이 Changpotou 터널 막장-1, Changpotou 터널 막장-2, Xiamaomaotou 터널 막장-2의 세 가지 현장 모델에 적용되었다. 결과는 RCD 방법이 절리선을 탐지하고 현장 모델에서 제거하는 데 성공적이었음을 보여주었으며, 법선 벡터는 경사/경사방향으로 변환되었으며 경사각 필터링은 현장 모델에서 절리대를 성공적으로 제거하였다.
전반적으로, 이 연구는 R-C-D 방법을 사용하여 효과적으로 암석 절리면을 추적할 수 있는 것을 보여줌으로써 암석 안정성 관련 분야의 연구에 기여할 수 있다. 본 논문의 결과는 터널, 광산 및 기타 암석 공학 응용에 있어 암석 엔지니어링 설계와 건설에 적용될 것으로 예측된다. 3.1장에서 제시한 경사방향 및 경사각을 산정하는 방법은 R-C-D 방법과 연계하여 사용될 수 있다. 향후 연구에서는 R-C-D 방법에서 산정된 절리면의 경사방향 및 경사각을 4가지 기법을 도입해서 산정하고 비슷한 경사방향 및 경사각을 그룹핑하는 연구를 진행할 예정이다.
