

1. 서 론
2. 기계학습기반 영상유고감지시스템의 구성
2.1 시스템의 설계
2.2 사전검토용 차량유고시스템 및 영상자료의 구성
3. 현장자료 적용 및 고찰
3.1 학습자료 작성
3.2 기계학습 환경 설정 및 학습
3.3 학습결과 분석
4. 결 론
1. 서 론
터널은 일반도로에 비해 운전자가 대피할 공간이 충분하지 않으며, 회피운전을 하기 어렵기 때문에 터널 내에서의 교통류 돌발상황은 대형사고와 2차 사고로 이어질 가능성이 크다. 2022년까지 국내 국도터널은 288개소가 신설 될 계획이며 그 중 장대터널은 61개소가 신설 될 계획에 있다(MOLIT, 2015). 장대터널의 증가와 함께 터널사고와 더불어 2차사고의 피해 역시 더욱 증가될 것으로 예상된다.
국내 도로터널의 경우, 고속도로 총 925개 터널 중 73%에 해당하는 678개소에 사고자동 감시 시스템이 설치되어 있는 반면 국도터널에는 총 499개소의 터널 중 17%에 해당하는 84개소에만 사고자동 감시 시스템이 설치되어 있어 나머지 83%에 해당하는 터널에서는 사고가 발생할 경우 감시 시스템의 미비로 인한 신속대응의 어려움으로 추가 사고의 위험이 있다(MOLIT, 2016). 또한 터널에 설치되어 있는 사고 자동감지 시스템의 검지 현황을 연도별로 분류해서 살펴보면, 2012년에는 오검지율이 약 88%정도였지만 2015년에는 약 96%까지 증가한 것으로 나타났다(National Committee for Land and Transport. 2016). Kim (2016)은 8개소의 고속국도와 2개의 고속국도 터널에서 터널 영상유고 감지시스템의 성능분석을 수행한 바 있다. 여기서, 현재 운영 중인 장비들과 소프트웨어들은 터널 내 환경변화와 감지된 영상의 질에 매우 민감하며, 대부분의 터널에서 각 영상유고항목에 대한 자동 인식률이 매우 낮음을 파악한 바 있다. 이에 각 터널의 특성을 감안해 확보영상의 조도 특성을 소프트웨어에 반영해주고 각 터널 형상을 고려해 그림자 등의 발생 특성을 파악하여 조정해 주면 CCTV장비로부터 100 m이내에서 크게 감지 성능을 향상시킬 수 있다 그러나 수많은 터널 내 모든 CCTV장비들을 일일이 최적화하는 것은 쉽지 않은 일이며, 최적화 조건도 시간이력별, 그리고 터널 상황에 따라 달라질 것은 자명하다. 이처럼 현재 터널에 설치되어 있는 사고 자동감지시스템의 오검지율을 개선하기 위해 새로운 방향의 문제 해결을 위한 연구가 절실한 상황이다(Kim et al., 2012).
이렇게, 영상감시를 통한 현장 상황 인식에 대한 중요성이 높아지며 IP기반 카메라의 대중화와 영상분석 기술의 발전으로 세계 지능형 영상감시 시장은 37%이상 성장할 것으로 전망하고 있다(Choi and Kwon, 2010). 여기에서 영상 인식은 데이터를 통해 의미 있는 정보를 추출하는 문제를 뜻하는데 조명변화나 주변 환경에 영향을 많이 받으며 카메라의 각도 등에 따라 형상이 달라질 수 있기 때문에 수학적인 모델링이 쉽지 않다(Park, J.K et al, 2015). Karpathy et al. (2014)은 컨벌루션네트워크(Convolution network, CNN)를 활용하여 대규모의 영상자료를 분류하는 연구를 수행하였고 그 결과 정확한 분류가 되어있지 않은 데이터를 분류하는 과정에서 기존 방법보다 더 우수한 성능으로 영상자료를 분류하는 것을 확인하였다. 하지만 고정프레임을 가지고 있는 영상에 대해서만 성능 검증을 하였기 때문에 이동프레임 영상에 대한 추가적인 검토가 필요할 것이다. Qouc et al. (2012)는 대규모의 불특정 이미지 데이터를 비지도 학습과정을 통하여 높은 수준으로 이미지의 특징을 탐지하는 기능을 구축하기 위하여 불특정 다수의 영상을 16,000개의 CPU에서 비지도(unsupervised learning) 학습을 수행하여 사람 얼굴과 몸 등이 검출되는 뉴런이 자연스럽게 학습됨을 발견하였다.
Roh et al. (2016)은 터널관리시스템 콘텐츠를 대상으로 IPA (Important Preference Analysis)분석을 실시하여 터널 관리자가 중점개선사항으로 요구하는 항목을 선정하였다. 중점개선 사항으로 요구된 부분은 터널 관리에 있어 중요도가 매우 높게 평가되지만 지원되는 콘텐츠의 질이 만족스럽지 않은 것들인데 선정된 3가지 항목이 모두 영상관제와 관련된 콘텐츠로 선정되었다. 이러한 문제점 해결을 위해 해당 연구에서는 영상정합기술을 통한 터널관리시스템을 제안하였지만 범용 CCTV를 활용하여 일반도로에서만 성능을 테스트 하였고 터널 환경에 대한 테스트는 미비하였다.
이처럼 여러 사례를 살펴 본 결과 터널이라는 특수한 환경에 대한 연구사례는 아직 부족하고 기존에 있는 영상유고 시스템은 일반도로와 다른 터널의 특성을 고려하지 않아 시스템의 오검지율이 높게 나타났다. 따라서 본 연구에서는 이러한 문제점을 해소하고자, 비산먼지가 많고 조도가 낮은 터널의 특성을 감안할때 기존의 규칙기반 알고리즘을 활용한 영상유고감지에는 한계가 있다고 판단하였다. 따라서 최적 영상 확보를 위한 노력보다는 확보된 영상을 기반으로 정확하게 터널 내 유고상황을 감지할 수 있는 방향으로 연구를 수행코자 한다. 결국 본 논문에서는 기계학습 기반의 영상 학습을 통해 수많은 터널 내 CCTV 영상을 학습하여 유고상황을 일반화시키고 터널 유고상황을 자동 감지할 수 있는 시스템을 개발하기 위한 선행 사전검토 연구를 수행하였다. 사전검토를 위해, 1단계로 기존의 영상 내 이동체를 식별하고 이동경로를 추적하는 영상분석 알고리즘을 활용해 도로상의 CCTV영상을 처리하여 이동객체와 그 이동 정보를 확보한다. 확보된 이동객체의 이동특성을 기계학습 알고리즘으로 학습하여, 도로상의 이동객체가 보여주는 이벤트에 대한 자동 인지 성능수준을 파악해 본다.
2. 기계학습기반 영상유고감지시스템의 구성
2.1 시스템의 설계
Fig. 1은 본 논문에서 구성한 시스템의 구성 모식도를 나타낸다. 본 시스템은 기계학습 단계와 추론단계로 구분된다. 우선, 학습단계에서 터널 영상유고감지를 위한 학습자료를 구성하기 위하여, 가용한 일반적인 터널 CCTV영상과 KICT (2006)에서 터널유지관리시스템(Tunnel Management System, TMS) 운영을 통해 수집해온 터널사고영상을 기존의 논리기반 알고리즘으로 활용해 영상내의 개별차량들을 감지하고 이동경로를 추적하여 개별차량의 시간이력별 위치정보를 계산한다. 이동경로 정보는 일정시간 간격으로 감지된 차량의 위치정보와 시간을 이용하여 이동 차량의 이동 벡터와 속도정보를 계산하여 구성한다. 시스템 내에서는 감지된 이동차량의 위치정보를 50 ms간격으로 파악하여 계산하는 것으로 코드화 하였다. 그러나, 동 시간에 CCTV영상내에서 감지된 차량의 수가 많아지면 지정된 시간간격보다 지연되어 계산될 수 있으므로, 이동차량의 정보 출력 시 절대시간을 출력케 하여 속도정보를 계산하였다. 하지만, 각 감지된 시간간격이 다르다 하여도 모든 차량의 위치정보는 10개로 설정하였으며, 따라서 동선 벡터의 수는 9개로 고정되었다.
각 인지 차량의 이동정보와 연계된 이벤트 태그(event tag)정보는 도로터널 방재시설설치지침(2016)에 명시된 평가항목(보행자, 정지차량, 역주행, 화재감지)인 4개 항목으로 구성되고 이외에도 유용하게 활용될 수 있는 낙하물 발생, 차량 충돌이나 터널내 차선변경 이벤트 등도 포함시켜 시스템을 구성할 계획이다. 하지만, 이와는 별도로 본 논문에서 수행된 고찰에서는 사전검토 목적으로, 현재 확보된 이벤트들을 중심으로 이벤트태그를 구성하여 사전검토를 수행하였다. 따라서 기계학습에 사용될 입력변수는 9개의 이동벡터(2개의 방향성분)와 속도정보로 총 27개이며, 결과변수는 향후 7개의 태그로 이루어 질 계획이나 본 논문에서는 이와는 별도로 6개의 태그정보로 설정하였다. 이러한 정보형식에 맞추어 가용한 차량 CCTV영상을 대상으로 시스템을 가동하여 학습자료를 구성하고, 기계학습을 수행하게 된다. 이를 이미 확보한 자료를 대상으로 학습하는 off-line 학습단계라 한다.
학습이 완료되면, 추론 및 운영모드가 가동된다. 운영모드에서는 실시간으로 들어오는 CCTV 영상을 대상으로 상기 서술한 1단계 영상처리 알고리즘을 통해 실시간으로 개별 차량을 감지하고 정해 놓은 입력변수의 정의에 따라 정보를 자동 생성한다. 각 차량의 동선을 모니터링하며 기 설정한 이벤트 태그 항목에 명시된 이상 현상들의 발생 여부를 실시간으로 파악하게 된다.
동시에, 운영모드에서 축적된 차량 이동정보와 이벤트 정보는 데이터베이스에 저장되어 기존의 학습자료와 함께 누적된다. 운영모드에서 시간이력별로 누적되는 자료들은 시스템의 운영과 동시에, 별도의 기계학습 서버에서 추가 학습이 진행된다. 이를 on-line 학습이라 하고, on-line 학습결과는 정기적으로 운영모드로 가동 중인 기계학습 시스템에 반영되어 그 추론성능을 점차적으로 자동 향상시킬 수 있다.
2.2 사전검토용 차량유고시스템 및 영상자료의 구성
본 사전검토 연구에서는 CCTV로부터 확보된 초기 영상내의 일부를 주 관심영역에 추가로 설정하였다. 이는 개별 CCTV 영상마다 임의로 달리 설정될 수 있으며, 최초 CCTV 설치시 설정되어 고정될 수 있다. 이러한 접근법을 통해 목표 영역을 명확히 하여 정보의 일관성과 추론 성능을 향상 시킬 수 있을 것으로 기대된다. Fig. 2에서와 같이, CCTV 원영상은 좌측상단을 원점으로 1920×1080 픽셀(수평×수직)로 구성되어 있고(global coordinates), 원영상 내부에 관심영역(ROI) 창이 수동으로 임의 설정된다. 그 다음 Fig. 2에서와 같이 임의 설정된 ROI창의 4개 꼭지점은 원영상 픽셀좌표를 기준으로 그 좌표가 설정된다. 그 다음 ROI창 내부는 원영상 픽셀좌표와 독립적으로 ROI좌측상단 꼭지점을 원점으로 하여 255×255 픽셀 좌표로 재정의된다(local ROI coordinates). 따라서 최종적으로 CCTV 원영상에서 감지된 차량의 위치좌표는 ROI좌표로 변환된 후, ROI좌표계로 정의된 좌표로 이동차량의 이동벡터와 속도를 계산한다. 이는 다양한 각도와 다양한 조건의 CCTV영상들에서 확보한 차량 이동정보들을 통합처리하기 위한 공간정보의 정규화과정이라 할 수 있다.
이어 ROI 좌표계로 정의된 각 이동차량의 위치좌표와 시간을 이용하여 임의 시간간격의 동선벡터를 계산한다. 따라서, 동선벡터는 모든 감지차량의 첫 번째 감지 위치를 기준으로 계산되므로 ROI창에 들어온 위치가 다르다 하여도 모든 차량의 동선벡터는 진입위치를 기준으로 정규화 되어 설정된다. 이를 수식으로 표현하면 다음과 같다.
Veci = PTi+1 – PTi ; Veli = Length(Veci)/(Ti+1 – Ti), i = 1 to 9 (1)
여기서, Length는 벡터의 길이, P는 감지된 차량의 i시점에서의 좌표이며(ROI좌표계 기준)이고, T는 i시점에서의 시간이다. 따라서, Veci는 i시점에서 i+1시점 간에 이동한 동선벡터를 의미하며, Veli는 i시점에서 i+1시점 간의 이동속도를 의미한다.
결과적으로 CCTV영상에서 ROI창내로 진입하는 모든 차량은 자동으로 감지되며, 각 차량은 총 10번의 위치감지 단계를 거쳐 총 9개의 벡터와 9개의 속도정보로 그 동선이 정규화 되어 정의된다. 벡터성분이 수평 및 수직, 2개의 성분임을 감안하면 총 27개의 기계학습의 입력변수(영향인자)가 설정된다.
27개의 정보로 정의된 각 이동차량 동선정보는 해당 차량의 이벤트 정보와 한 쌍을 이룬다. 따라서, 매칭되는 이벤트 정보를 이동차량으로부터 얻어내고 자료화 한다. 감지된 이동차량의 이벤트 태그의 정의는 Table 1과 같다. 이들은 사전검토를 목적으로 임의로 설정된 이벤트이며, 추후 터널영상유고 자동 감지용 시스템에서는 도로터널 방재시설설치지침(2016)에 명시된 평가항목(보행자, 정지차량, 역주행, 화재감지)인 4개 항목과 유용하게 활용될 수 있는 낙하물 발생, 차량 충돌이나 터널내 차선변경 이벤트 등을 포함하여 이벤트 태그정보를 구성할 계획이다.
Table 1에 설정된 이벤트 각각은 본 논문의 저자들이 기 보유한 이동체 감지소프트웨어에 프로그램화 하여 이동차량에 대한 이벤트 정보를 자동으로 모니터링하고 초기 추출하였다. 이후, 초기 확보된 이벤트 정보는 해당 CCTV영상을 통해 육안으로 확인하고 수동 조정 작업을 통해 정보의 신뢰성을 확보하였다. 초기단계의 off-line 학습단계에서는 과거의 정상류 영상과 유고 이벤트가 발생한 영상들로부터 준비된 학습자료를 대상으로 학습하게 되므로 면밀한 사전 학습자료 검토를 통해 학습 신뢰도를 향상 시킬 수 있다. 이후, 운영단계에서, 영상유고 이벤트의 추론이 지속적으로 이루어지고, 이벤트 태그 정보가 추론을 통해 자동 생성되며, 이벤트 발생 시 현장 관리인들을 통해 확인되고 정보가 실시간으로 보정된다. 그러므로 신뢰성 있는 이벤트 정보가 갖추어진 방대한 양의 터널 내 이동차량의 정보가 모든 현장으로부터 자동으로 누적되게 된다. 이들은 영상유고감지시스템의 현장 운영과 동시에, 별도의 기계학습 서버로 옮겨져, on-line 학습을 통해 학습이 이루어지며, 학습 결과는 일정 시간간격으로 현장의 영상유고감지시스템에 업데이트되어 그 추론성능을 지속적으로 향상시킨다.

3. 현장자료 적용 및 고찰
3.1 학습자료 작성
2.1장에서 설명한 27개의 입력변수들(이동벡터와 속도 정보)과 6개의 출력변수(이벤트 태그정보)들로 구성된 자료형식에 맞추어, 보유한 CCTV 영상처리 소프트웨어를 사용하여, 일정시간동안 2개의 교통류 CCTV를 통해 얻어진 교통류 영상을 처리하여 총 4,051개 차량을 감지하였으며, 각 차량의 이동경로 정보와 이벤트 정보 자료를 작성하였다.
기계학습에 사용된 입력변수는 식 (1)에 의해 정의되며, 이벤트 정보는 상기한 Table 1에 정의된 바 있다. 4,051개의 학습자료 중에서 6개 이벤트 중 한 개 이상의 이벤트가 발생한 차량수는 총 1,126건이며, A 이벤트 발생건수는 629개, C 이벤트 발생건수는 558건, D 이벤트는 303건이다. C과 E, F 이벤트 발생건수는 본 사전검토 기계학습에서는 없으며, 그럼에도 향후 추가 학습자료 발생 가능성을 감안하여 출력변수로 반영하고 학습에 적용하였다.
3.2 기계학습 환경 설정 및 학습
본 사전검토 연구에서는 기계학습 알고리즘의 표준인 역전파 인공신경망 알고리즘의 보완 버전인 레질리언스 역전파 알고리즘(Resilient Propagation, RPROP)을 사용하였다(Shin, 2001; Shin and Kwon, 2009a; Shin et al., 2009b). 입력변수는 27개이며 출력변수는 6이다. 은닉층은 2개로 설정하였고, 각 은닉층의 노드수를 변수로 하여 총 9개의 은닉층 구조모델을 설정하였다. 모든 층에서의 활성화 함수는 비선형 시그모이드함수를 사용하였다(Shin, 2001). 설정된 은닉층 모델은 첫 번째 은닉층의 경우 입력변수보다 적은 10개에서 500개의 노드수 사이에서 임의간격으로 설정하였다. 두 번째 은닉층의 경우는 출력변수보다 적은 3개의 노드와 250개 노드수의 임의 사이값으로 설정하였다. 따라서 최종 인공신경망의 구조는 27(입력층)-1차 은닉층-2차 은닉층-6(출력층)이 된다. 상대적으로 대규모의 은닉구조가 적용됨에 따라 과학습(overfitting)의 우려가 커질 것이므로, 조기학습종료기법(early stopping)을 적용하여 과학습을 방지한 학습의 일반화를 확보토록 하였다(Skouras et al., 1994; Prechelt, 1998). 또한, 자료의 복잡도가 상당하여 학습 자체가 수렴되지 않고 발산하는 현상(underfitting)에 대비하여 학습률을 최소로 하여 조심스럽게 최적화 점(global minima)에 도달시킬 수 있도록 하였다. RPROP 학습 알고리즘에서 요구하는 학습율 매개변수인 △min은 일반적으로 사용하는 0.1보다 적은 0.001로 설정하였으며, 최대 가중치 허용변화량을 뜻하는 △max는 50으로 설정하여 국부최저점에 귀착될 가능성을 최소화하였다. 설정된 학습 매개변수값 등 학습 환경들은 수차례의 시행착오적 학습 수행을 통해 직관적으로 찾아진 값들이다.
학습은 가용한 4,051개의 학습자료에서 5%인 202개 자료를 무작위(random)로 추출하여 검증자료(testing data)로 활용하였다. 본 검증자료는 학습에 직접 사용하지 않았으며, 조기학습종료시점을 결정하기 위하여 학습도중 학습자료에 대한 시스템 오차값의 계산과 별도로 검증자료에 대한 시스템 오차값도 동시에 계산하여 오차값의 진행상황을 모니터링 하였다.
Fig. 3은 학습에 사용된 자료에 대한 학습진행 중의 평균 시스템 오차값 변화추이를 나타낸다. 그림에 의하면 가장 방대한 은닉층 규모의 모델에서는 학습초기에 오차율이 급작스럽게 증가한 구간이 있었으나, 이내 안정화되어 학습이 수렴되었다. 또한, 중간 수준급의 모델인 1, 2차 은닉층수 50-20모델은 15,000회 학습단계부터 학습자료에 대한 평균시스템 오차값이 꾸준히 증가하여 최적점을 찾지 못하고 발산하는 현상을 보였다. 이외의 모델에서는 전체적으로 시스템 오차값이 설정된 최대 반복회수까지 수렴하는 경향을 보였다.
Fig. 4는 학습에 사용되지 않고 무작위로 선택된 검증자료(testing data)에 대한 학습도중 평균 시스템 오차값(testing error) 변화추이를 나타내며, 상기한 조기학습종료기법의 적용을 위해 종료시점을 결정하는데 사용된다. 그림에서 보는 바와 같이, 중간급인 50-20모델은 비학습자료에 대한 시스템 오차값이 급격히 증가하는 22,000회에서 학습을 종료하였으며, 200-100모델에서는 33,000회에서 학습을 종료하였다. 100-50모델에서는 44,000회에서 학습을 종료하였으며, 초기에 시스템 오차값이 급격히 증가하였다 안정화된 500-250모델과 기타 모델들은 최대 반복학습회수인 50,000회까지 학습을 진행시켰다.
3.3 학습결과 분석
Table 2에서는, 이벤트가 발생한 1,126개의 자료와 발생하지 않은 자료 모두를 합친 자료인 4,051개 자료를 모수로 하여 계산된 추론 정확도 값을 나타낸다. 학습에 사용된 자료(training data)에 대한 추론 정확도는 좌측편에 학습에 사용되지 않은 자료(testing data)는 우측에 정리하였다. 먼저, training data에 대한 추론 정확도 경향을 살펴보면, 매우 작은 은닉구조모델이라도 학습 자체는 성공적으로 진행되었다 평가할 수 있다. 또한 그 구조가 커져서 학습의 기억능력이 커짐에 따라, 학습자료에 대한 재추론 정확도는 점차 증가하는 경향을 보인다. 보다 방대한 규모의 기계학습은 상대적으로 과학습에 빠질 가능성이 더욱 커지나, 본 논문에서 사용된 조기학습종료기법을 적용함으로써 과학습의 가능성은 극복되었다고 가정하였다. 3% 이하 수준의 학습 달성도 기준으로, 100-50규모 이상의 모델들이 합리적인 학습모델들이라 평가될 수 있다. 규모가 커질수록 기하급수적으로 소요 학습시간과 같은 학습효율성이 기하급수적으로 떨어지므로, 이를 감안하면 300-150 모델이 그 중에서 최적의 학습모델이라 평가할 수 있다.
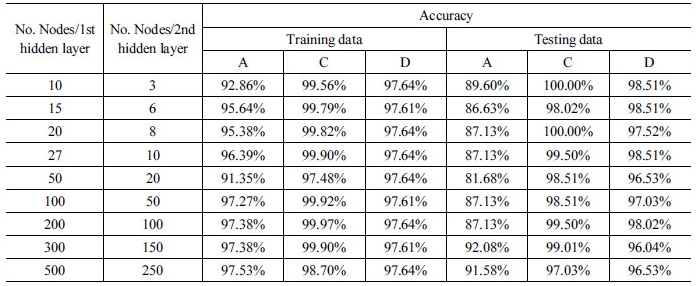
이어, 학습에 활용되지 않은 자료에 대한 추론성능을 분석해 보면, Table 2에서 볼 수 있는 바와 같이 서행정차 이벤트(C)와 정차 후 재출발 이벤트(D)의 경우는 전체 모델에서 거의 만점에 가까운 정확도를 보였으나, 차선변경 이벤트(A)에 대한 추론 정확도에서는 각 모델마다 상이한 결과를 보였다. 위에서 언급한 합리적인 학습모델로 1차 평가된 300-150모델이 서행정차 이벤트에 대해서도 8%이내의 추론 정확도를 보이며 상대적으로 가장 일반화 학습이 잘 이루어 졌다고 평가될 수 있다. 하지만, 전체적으로 각 은닉층 구조 모델별 추론 정확도의 차이는 크지 않았다. 따라서 동일 학습모델을 사용하여 이벤트가 발생한 1,126개 자료를 모수로 하여 Table 2와 동일한 방식으로 추론 정확도 분석을 실시하였다. 그 결과는 Table 3과 같다.
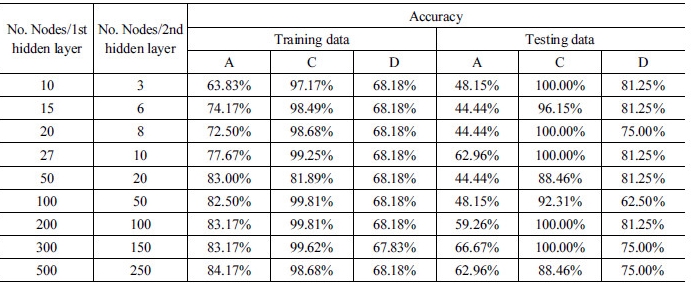
Table 3에서 볼 수 있듯이, Table 3의 경우보다 각 학습모델별 추론 정확도의 차이가 확연하다. 특히, 차선변경 이벤트(A)에 대한 추론 정확도는 training data와 testing data에 대한 정확도 공히, 100-50모델 규모 이하에서는 확연히 추론정확도가 떨어지는 것을 볼 수 있다. 따라서 Table 2의 분석결과와 같이, 문제의 복잡도를 감안하여 충분한 기억력을 갖춘 300-150모델이 합리적인 추론 성능과 일반화 학습이 진행된 최적의 학습모델로 평가될 수 있다.
4. 결 론
본 연구에서는 교통류의 차량 이동 특성을 파악하는데 있어서 기계학습의 적용 가능성을 고찰하였다. 이를 위해 CCTV 스크린상에서 주 관심영역을 설정하여 관심영역내에 진입한 모든 차량들의 경로정보와 이동특성을 기존 영상처리 소프트웨어를 활용해 얻어내고, 각각의 경우에 이벤트 발생정보를 파악하여 자료화 하였으며, 이를 기계학습알고리즘에 연계시켜 학습하였다. 학습의 일반화를 확보하기 위해 가용한 자료인 총 4,051개의 이동차량 정보 중 95%를 학습자료로 사용하였다. 나머지 5%는 학습 달성도 파악, 과학습을 극복하기 위한 조기학습종료기법을 적용하기 위한 비학습자료에 대한 시스템 오차 계산 등에 활용하였으며, 학습 종료 후, 추론 신뢰도를 파악하는데에도 사용하였다.
기계학습은 은닉층 규모에 대해 총 9개의 모델을 설정하여 매개변수 연구를 수행하였다. 학습자료와 비학습자료로 구분하여 학습이 완료된 기계학습엔진의 추론 정확도를 파악하였다. 전체자료에 대한 정확도와 이벤트가 발생한 자료에 대한 추론 정확도를 구분하여 검토하였다. 이러한 검토연구를 통해 다음과 같은 결론을 얻었다.
1.교통류 차량 이벤트 특성은 기계학습을 통해 학습될 수 있으며, 이벤트 예측에 높은 적용 가능성을 보였다. 심지어는 교통류 이동특성을 나타내는 27개의 입력변수 수준의 은닉층 규모로도 학습 자체는 성공적임을 보였다. 입력변수 개수의 10배정도 되는 다소 큰 규모의 은닉층 구조모델에서 보다 안정적이고 다소 우수한 추론 성능을 보였다. 본 연구에서는 1차 및 2차 은닉층 수가 각각 300, 150개로 설정된 모델이 최적의 구조로 평가되었다. 하지만, 규모가 커질수록 요구되는 학습시간은 기하급수적으로 늘어나므로 실제 본 시스템 개발에서의 학습에서는 학습 효율성 또한 고려하여야 하며, 최신 GPU기반 병렬계산의 적용도 검토될 수 있다.
2.본 연구와 같은 방대한 빅데이터를 다루는 기계학습에 있어서, 시스템의 추론성능은 기계학습 알고리즘보다, 확보하고 있는 빅데이터의 질과 구성, 특히, 지도학습을 위한 이벤트 정보의 신뢰성과 그 양에 의해 좌우된다. 따라서 본 논문에서 제시된 Table 2와 Table 3의 값들은 기계학습 시스템 개발을 위한 사전 검토 목적에 대해서만 의미가 있다. 즉, 본 논문에 사용된 영상 학습자료 이벤트 정보의 신뢰성에 대한 면밀한 검토 없이는 추론 정확성 분석결과를 정량적인 정보로 활용하기에는 무리가 있다. 특이할 만한 사항으로, 기존 시스템과 달리 기계학습기반 시스템은 운용 중에 자동으로 추가 확보되는 빅데이터의 추가 학습을 통해 시스템의 수정 없이 자동으로 감지능력이 향상된다는 점이다.
3.본 사전검토에서는 CCTV영상 스크린내의 관심영역(ROI)내 동시다발적으로 진입하는 교통 차량들을 개별적으로 감지하고 추적한 정보를 학습에 사용하였다. 따라서, 같이 이동하는 주변 차량의 이동 정보는 연계되어 학습되지는 못 했다. 하지만, 일반적으로 도로상의 교통류 돌발 현상들은 관심 차량과 인접차량의 이동 특성들을 연계하여 함께 검토하고 판단하는 것이 합리적이라 할 수 있다. 이를 위해서는 시간 이력별로 변화하는 다수의 차량이 함께 포함된 영상들을 학습하는 것이, 교통류 유고 감지를 위한 보다 현실적인 접근방식이라 할 수 있다. 따라서, 향후 연구에서는 딥러닝 개념을 도입하여 교통류 영상화면 자체를 학습하고 차량의 이동 특성 및 돌발상황을 감지하는 접근법이 시도될 만하다.
