

1. 서 론
TBM (tunnel boring machine)을 이용한 터널 공사는 타 건설산업과 달리 폐쇄적인 환경이며 복잡한 중장비의 이동이 잦다. 또한, 지하공사는 재난 발생 시 인적, 경제적 리스크가 크고, 바깥으로 대피 가능한 경로가 매우 한정적이다(Kim et al., 2011). 따라서 터널 공사에서 작업자의 안전을 확보하고 비상상황에 신속히 대비하는 것이 중요하다. 이를 위해 지하 공간 내 작업자의 위치 정보를 실시간으로 추적하여, 재난 발생 시 위험 인원을 정확히 파악하고 신속히 구조 작업을 수행해야 한다.
터널 공사에서 요구되는 위치추적 시스템은 제한된 환경에서도 높은 정확도로 실시간 정보를 제공해야 하며, 분진, 진동, 충격 등이 발생할 수 있는 열악한 환경에서도 안정적으로 운영될 수 있어야 한다. 또한, 일반적인 건설 현장의 한정된 공간과는 달리, 터널 공사는 공간이 지속적으로 확장되므로 시스템의 위치정보 추적범위도 동일하게 확장될 수 있어야 한다. 그 외에도, 합리적인 비용으로 구축 및 운영할 수 있어야 하며, 시공현장에서 작업자의 이동 경로나 중장비의 배치 등에 영향을 주지 않아야 한다.
최근 스마트폰, 사물인터넷(IoT) 등의 보급이 증가함에 따라, RFID (radio frequency identification), BLE (bluetooth low energy), Wi-Fi 등 협대역 무선통신 기반의 다양한 실내 위치추적 기술이 발전되고 있다. 협대역(narrowband) 위치추적 기술은 좁은 주파수 대역을 활용해 무선 신호를 송수신하여 거리를 추정하는 방식으로, 저전력 소모와 시스템 구축의 용이성 등의 장점이 있다. 그러나 1~5 m 정도의 오차범위를 가지며, 주파수 간섭과 다중경로 간섭(multi-path interference) 등의 영향을 받아 측위 정확도가 저하될 수 있다. 따라서 협소한 시공 공간과 송수신 신호를 간섭할 수 있는 중장비들을 활용하는 TBM 공사 현장에서는 협대역 무선통신 기반 위치추적 시스템의 활용도가 매우 낮을 것으로 판단된다.
따라서 본 논문에서는 상술한 협대역 무선통신의 문제점을 극복하기 위해 초광대역(ultra-wideband, UWB) 무선통신 주파수 기반의 위치추적 기술 선정을 목적으로 한다. 초광대역 무선통신은 매우 짧은 펄스를 이용해 정확한 위치측위를 제공하며, 다중경로 간섭의 영향이 거의 없어 실내 위치추적에서 큰 강점을 지닌다. 따라서 본 연구에서는 UWB 세부 위치측위 기술들을 분석하고, 선정된 기술을 바탕으로 TBM 터널 시공현장의 위치추적 시스템을 설계한다. 마지막으로 시스템 구성 요소별 필요 기능을 제안한다.
2. 초광대역(UWB) 위치추적 기술
2.1 개요
Federal Communications Commission (2002)은 UWB를 500 MHz 이상의 넓은 주파수 대역폭을 사용하거나, 중심 주파수 대비 대역폭이 20% 이상인 무선통신 기술로 정의하고 있다(Sharma et al., 2021). UWB는 시간 영역에서 1~4 nsec의 매우 짧은 펄스를 이용해 데이터를 전송하므로, 높은 위치추적 정확도와 빠른 데이터 전송속도를 제공한다. 특히 UWB는 폭이 좁은 펄스 신호를 활용해 신호를 넓은 주파수 대역폭으로 확산시켜 전송하므로, 특정 주파수 대역에서의 간섭을 줄일 수 있다. 따라서 BLE, Wi-Fi, RFID 등과 같은 협대역 위치측위 기술보다 cm 수준의 높은 정확도로 위치를 측정할 수 있다. 실내 위치측위 기술별 성능 비교는 Table 1과 같다(Ahmed et al., 2020).
Table 1.
Comparison of positioning technology
| UWB | BLE | Wi-Fi | RFID | |
| Accuracy | < 30 cm | < 8 m | < 15 m | < 10 m |
| Range/Coverage | 20~100 m | 5~50 m | < 150 m | < 1 m |
| Battery | < 2 years | 2~5 years | < 3 years | No battery |
| Tag cost | $100+ | $5~$100+ | $100+ | $20~$100+ |
2.2 세부 위치측정 방식 선정
UWB를 활용한 거리측정은 ToF (time of flight)를 이용한다. 위치측정 방식은 신호 전송 및 측정 방법에 따라 크게 TWR (two-way ranging), TDoA (time difference of arrival) 및 PDoA (phase difference of arrival)로 구분된다.
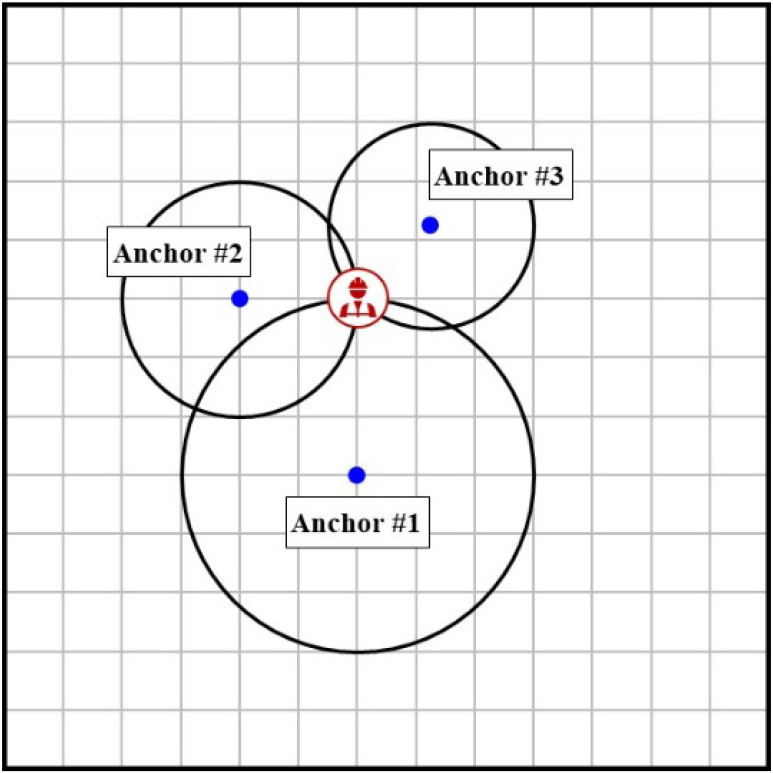
TWR 방식은 장치 간 양방향 통신을 이용하며, Fig. 1과 같이 태그-앵커간 메시지 교환을 통해 거리를 계산한다. 이때, 태그(tag)는 위치 추적 대상이 되는 이동 객체에 부착되는 장치이며, 앵커(anchor)는 대상 태그의 위치좌표를 계산하기 위한 기준점 역할을 하는 고정된 장치이다. 먼저 태그는 Poll 메시지를 앵커로 송신하고, 이때의 송신시작시간 t1을 기록한다. Pool을 수신한 앵커는 일정한 응답지연시간 treply을 두고 태그로 Response 메시지를 전송한다. 태그는 Response를 수신한 후, 이때의 신호수신시간 t2을 기록한다. 두 장치 간 거리는 식 (1)과 같이 신호왕복시간(ToF)과 빛의 속도 c를 이용해 계산할 수 있다. 앞서 측정된 태그-앵커간 거리를 활용한 삼각측량을 통해 Fig. 2와 같이 태그의 위치를 정확히 추정할 수 있다.
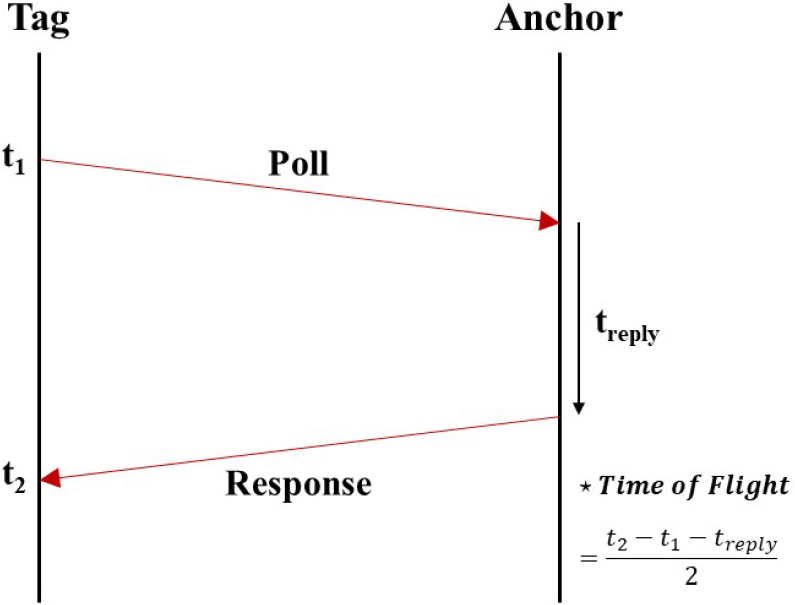
TWR 방식은 양방향 통신을 사용하므로 별도의 시간 동기화 작업이 필요하지 않아 안정성이 뛰어나다. 또한, 계산이 단순해 간단한 하드웨어로 구현 가능하다. 그러나 태그와 앵커가 양방향으로 메시지를 교환하므로 전력소모가 크다는 단점이 있다.
TDoA 방식은 하나의 태그에서 주변의 여러 앵커로 신호를 송신하는 단방향 통신 방식이며, 정밀하게 시간 동기화된 앵커들의 태그로부터 신호 수신 시간 차이를 이용해 태그의 위치를 추정하는 방식이다. 수신시간 차이를 통해 계산된 각 앵커와 태그 사이의 거리 차이는 식 (2)로 표현할 수 있고, 태그는 두 앵커로부터의 거리의 차이가 일정하므로 식 (3), (4)와 같은 쌍곡선 식으로 정리할 수 있다. 태그는 쌍곡선 중 한곳에 위치하게 되며, 산출된 쌍곡선들의 교차점을 계산하면 Fig. 3과 같이 태그의 정확한 위치를 추정할 수 있다.
여기서, 는 앵커 와 의 거리 차이, 는 신호의 전파속도, , 는 각 앵커 , 에서의 신호수신시간이다. 또한, , ( = 1, 2, 3)는 앵커 의 위치 좌표이며, 이를 통해 태그의 위치 좌표 , 를 추정할 수 있다.
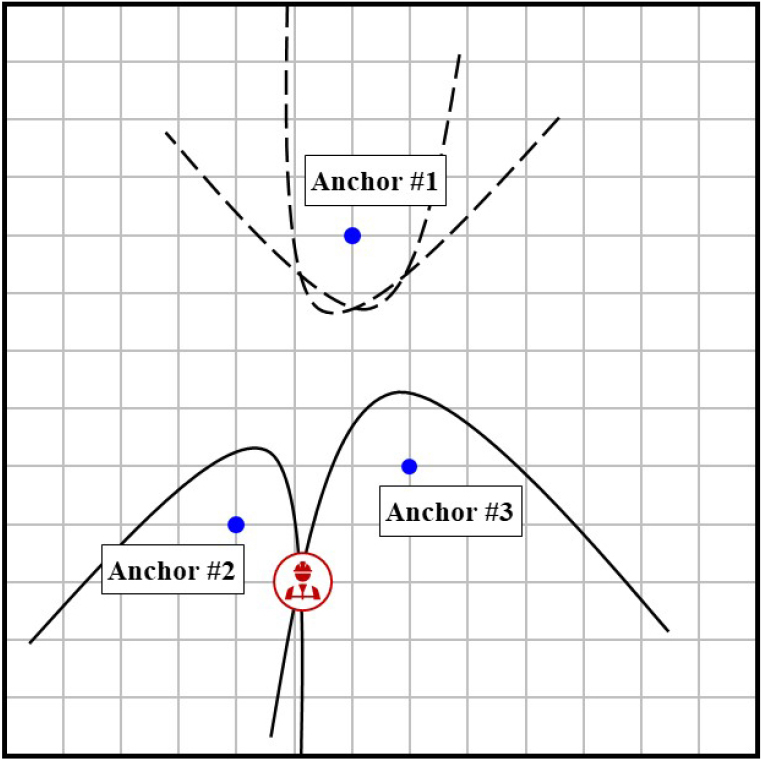
TDoA 방식은 단뱡향으로 하나의 메시지만 전송하므로 적은 전력소모로 통신이 가능하다. 또한, 태그는 신호 송신에 필요한 시간이 짧아 송신 주기가 짧고, 이는 동시에 많은 태그를 처리할 수 있어 대규모 위치 추적이 가능하다. 다만, 정확한 위치측위를 위해선 앵커 간 매우 정밀한 시간 동기화가 필수적으로 요구되므로 온습도에 영향을 받지 않는 고정밀 발진기(정밀도 10 ppm 이하)를 사용해야 하며, 다중경로 환경에서는 전파 지연으로 인해 앵커간 시간 변화가 발생할 수 있다(Gezici et al., 2005). 또한, 쌍곡선 방정식을 활용하므로 태그가 앵커 영역 외부에 위치할 경우 측위 정확도가 떨어질 수 있다.
PDoA는 태그에서 보낸 신호가 앵커의 두 안테나에 도달할 때의 위상 차이를 측정하여 도착 각도를 계산하고, 이를 활용해 태그의 위치를 추정하는 방식이다. Fig. 4에서 신호의 도착 각도 θ는 식 (5)와 같이 구할 수 있다. 여기서, λ는 입사신호의 파장, ∅는 두 안테나 간의 위상 차, d는 두 안테나 사이의 거리이다.
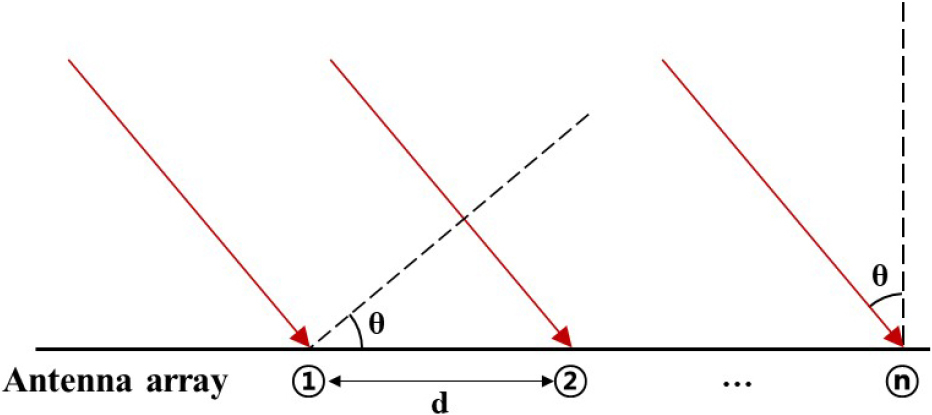
태그의 위치는 PDoA 방식으로 추정된 각도들과 앵커 사이의 거리를 활용한 삼각측량으로 측정할 수 있다. PDoA 방식은 정밀한 동기화 없이도 정확한 측위가 가능하지만, 배열 안테나와 일련의 신호처리를 위한 물리계층 등이 포함되어야 하므로 크기가 크고 소비전력이 많다(Pages-Zamora et al., 2002). 또한, 장애물에 의해 도착 각도 변화와 장거리에서의 신호 감쇠 등으로 인해 오차가 발생할 수 있다.
본 논문에서는 터널 공사의 특성상 지속적인 지반 굴착에 따른 측위 공간 확장, 밀폐된 지하 환경, TBM 중장비 등을 고려하여 시간 동기화 작업이 크게 필요하지 않고, 편의성 및 소형화가 가능한 TWR 방식을 최적의 측위 기술로 선정하였다.
3. UWB 기반 터널 시공현장 위치추적 시스템 구축 방안
TBM 시공 환경은 작업자 간 의사소통이 매우 힘들고, 재난 발생 시 작업자의 위치를 파악하기 어려운 특성이 있다(Jang et al., 2009). 또한, TBM 본체에는 전파 송수신을 방해하는 시설이 많이 배치되어 있으며, 작업 공간이 협소하기 때문에 이를 고려한 UWB 기반 위치추적 시스템 적용이 적합하다고 판단하였다.
우선, TBM 지지 프레임 도출부, 이동 중인 MSV (multi service vehicles) 와의 충돌, 장비 작동 중 일부 이동 제한 통로, 전기 및 유압설비 등 작업자의 안전을 위협할 수 있는 공간을 출입 제한 지역으로 선정해야 한다. 실시간 위치추적 시스템은 작업자가 제한 지역에 접근하거나 진입할 경우 경고 알람을 주어 안전사고를 예방해야 한다. 또한, 시공 중 재난 발생 시 시공 현장 및 외부 사무실에 이를 통보하고, 재난 발생 장소에 위치한 작업자의 위치정보를 신속히 제공해야 한다.
UWB 기반 TBM 시공현장 위치추적 시스템의 구성도는 Fig. 5와 같다. 터널 외부에는 RTLS (real-time location systems) 플랫폼과 실시간 위치감시 시스템을 구축하고, 터널 내부에는 작업자 태그, UWB 앵커, 그리고 외부 네트워크 연결을 위한 통신 네트워크로 구성할 수 있다.
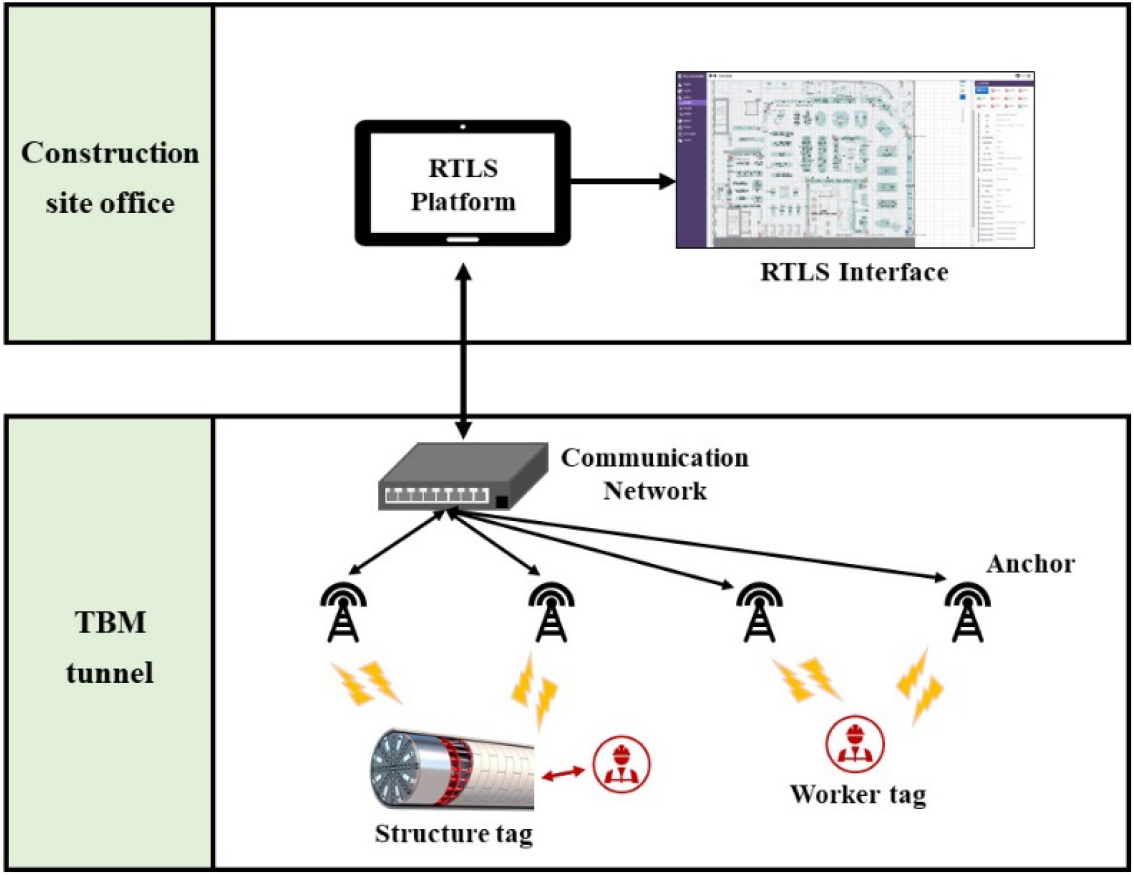
작업자 태그는 위치정보를 Sub-meter의 오차범위로 제공하는 UWB 신호 송수신 모듈로 구성되며, 열악한 작업 환경에 맞춰 내구성이 확보되어야 한다. 또한, 현장 작업자의 착용 및 작업 편의성을 고려하여 소형화 및 경량화된 센서로 개발되어야 한다. 그 외에도 시공 중 재난 발생을 대비해 저전력 소모 기술, LED 표시등, SOS 긴급 호출 버튼 등의 기능을 갖추어야 한다.
정밀한 위치정보 제공을 위해선 UWB 앵커의 설치 위치가 면밀히 검토되어야 한다. 신호 송수신을 방해하는 전파 방해 시설 및 대차 이동경로 등을 고려하여, 작업자의 주 이동 공간인 터널 좌우 벽면에 앵커를 설치하는 것이 적절하다. 통상적인 RTLS 시스템에서 위치추적을 위해서는 3개 이상의 앵커가 필요하지만, 터널 시공 특성상 지반 쪽 위치는 배제할 수 있으므로, 일부 구간에서는 2개의 앵커만으로도 작업자의 위치 파악이 가능하다. 앵커의 배치 간격은 터널의 크기와 형태에 맞춰 고려되어야 한다. 배치 간격이 좁을수록 더욱 정밀한 위치 측위가 가능하지만, 앵커 설치 및 유지관리 비용 등의 경제성도 고려되어야 한다. 또한, TBM 시공 환경에 맞춰 방수, 방진 성능을 갖추고, 발생 가능한 진동 및 충격에 대비한 내구성도 확보해야 한다. 그 외에도 앵커 간 시간 동기화, 전력 소모량 파악, 외부 접근 제어 등이 고려되어야 한다.
RTLS 플랫폼은 모든 작업자와 MSV의 위치를 실시간으로 파악하고 관리할 수 있도록 구성되어야 한다. 작업자 태그에는 작업자의 정보 및 작업 현황, 상태 등이 기록되고, 출입 제한 지역에 진입할 경우 경고 이벤트를 발생시켜 실시간으로 확인할 수 있어야 한다. 비상 상황 발생 시에는 대응 프로토콜을 작동시켜 119 자동 호출, 사고 현장에 위치한 작업자 정보 제공 등을 통해 신속한 대처가 가능하도록 하여야 한다. 그 외에도 UWB 앵커와 태그의 상태를 원격으로 점검하고, 펌웨어 버전 관리 및 업데이트를 수행할 수 있어야 한다.
또한, RTLS 플랫폼에서 획득한 위치 정보를 실시간으로 전송하기 위해서는 유선통신망(fiber, copper 등) 또는 상용 무선 통신망(LTE, 5G 등) 등이 필요하지만, 공사 현장은 특성상 과도한 구축 및 유지보수 비용으로 인해 제한적인 통신망 제공이 가능한 현실이다. 따라서 비용경제성(cost effective)을 고려하여 TVWS (TV White Space) 무선 통신 기술 기반의 Private wireless network 적용시 기존 통신망 대비 1/10 수준의 비용으로 전송망 구축 및 운영이 가능하여 터널 건설 안전 관리 시스템 확산이 가능하다(Shin et al., 2023).
4. 결 론
TBM 터널 시공현장에서 안전사고 발생 시 작업자의 위치를 빠르게 파악하고 신속히 대응하는 것이 중요하다. 본 논문에서는 TBM 터널 공사 중인 근로자의 위치를 실시간으로 추적하기 위해 초광대역(UWB) 무선통신을 활용한 위치측위 기술을 선정하였다. 또한, UWB 기반 TBM 터널 시공현장 위치추적 시스템의 구축을 위한 요소별 주요 고려사항을 제시하였다. 주요 결론는 다음과 같다.
1. 밀폐된 지하 공간에서 여러 중장비를 사용하는 TBM 터널공사의 특성상 주파수 간섭 및 다중경로 간섭이 발생할 수 있으며, 이를 상쇄할 수 있는 UWB 무선통신을 위치추적 기술로 선정하였다. UWB 기반 세부 위치측위 기술로는 TWR, TDoA 및 PDoA 등이 있으며, 터널공사의 특성을 반영해 TWR 기법을 최종 위치측위 기술로 선정하였다.
2. 선정된 위치측위 기술을 기반으로 TBM 터널 시공현장 위치추적 시스템의 구축 방안을 제시하고, 구성 요소별 주요 고려사항을 선정하였다. 작업자 태그는 소형화, 저전력, SOS 호출 기능 등을 갖추어야 하며, UWB 앵커는 터널 구조 및 작업 환경에 맞춰 적절히 배치되어야 한다. 또한, 재난 발생 시 119 자동 호출 및 위험 지역의 작업자 위치정보 제공 등의 비상 상황 대응 프로토콜이 구축되어야 한다.
3. 향후 UWB 기반 위치추적 시작품을 개발하고, TBM 시공현장 환경을 모사한 성능평가 실험 수행을 통해 제안된 시스템의 측위 정확도를 평가해야 한다. TBM 시공현장 위치추적 시스템이 상용화되면 안전사고 예방, 재난 신속대응, 작업 효율성 향상 등의 효과를 기대할 수 있다.
