

1. 서 론
2. 차량하중 및 접속부재
2.1 차량하중 모형
2.2 접속부재 모형
3. 중간슬래브의 동적응답해석
3.1 해석모형
3.2 차량 모델(Vehicle model)
3.3 노면 조도(Surface roughness)
4. 해석 결과
4.1 모드해석
4.2 동적응답 해석
4.2.1 중앙부(시점 기준 44 m지점)
4.2.2 종점부(시점 기준 88 m 지점)
5. 결 론
1. 서 론
최근 급속한 경제발전에 따른 도시 확장과 생활수준의 향상에 따라 도로 교통량이 급속히 증가하고 있으며 한정된 면적으로 증가한 교통량을 효율적으로 처리하기 위하여 복층터널과 같은 지하구조물의 건설이 해외를 중심으로 늘어나고 있다. 복층터널은 일반터널과 달리 터널 내부에 상부와 하부를 분리하는 중간슬래브가 존재하며 중간슬래브는 터널 라이닝 양 끝단에 브라켓을 지지점으로 설치하여 그 위에 설치하므로 단면 형상이 교량과 유사한 형태를 띠게 된다(Fig. 1 참조).
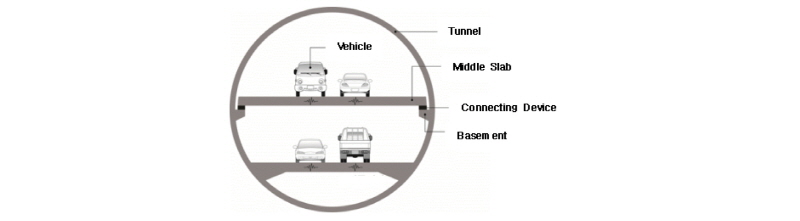
복층터널 내 하중의 대표적인 것은 차량하중이며 차량의 중량화 및 고속화 현상이 가속되고 있어 터널 구조물의 과도한 진동이나 처짐 등의 문제를 유발하게 된다. 특히 중간슬래브의 경우 차량하중의 영향을 직접적으로 받으며 양쪽 단부가 교각의 역할을 하고 있으므로 교량의 동적거동에 준하여 그 거동특성을 파악하여야 한다.
중간슬래브의 동적거동은 차량하중의 크기, 노면조도, 중간슬래브 구조물의 구조적 특성(강도, 질량, 형상, 감쇠비 등) 뿐만 아니라 차량하중의 이동속도와 차량의 급제동 및 급출발 시 발생하는 면내하중의 크기 등에 의해 영향을 받는다. 특히, 노면의 파손, 시공의 불량 및 진입부의 침하 등으로 생기는 노면조도 및 단차 등은 주행하는 차량의 동적하중을 증가시키는 중요한 요인이 되고 있다.
중간슬래브의 동적응답을 구하기 위해서는 교량의 노면조도의 영향은 물론 차량-교량 사이의 상호작용을 고려한 동적응답에 관한 연구가 필요하다. 차량이 중간슬래브를 주행할 때 발생하는 차량의 동적하중으로 인하여 동적거동을 하게 되며, 이러한 동적거동으로 인하여 중간슬래브에는 차량하중이 정적으로 작용할 때의 응답보다 더 큰 응답이 발생한다. 그러므로 복층터널 중간슬래브의 동적거동을 정확히 파악하여 설계 및 해석에 이용하는 것이 중요하다. 그러나 복층터널의 경우 중간슬래브가 라이닝에 거치되는 교량 형식으로 기존의 일반적인 도로교와는 그 형식이 다르며 차량 주행에 의한 동적 거동에 대한 연구가 거의 이루어지지 않고 있다. 따라서 본 연구에서는 복층터널 중간슬래브의 구조형식, 설계속도, 주행차량 및 노면조도 등을 고려한 해석모델을 작성하고 노면에 차량이 일정속도로 주행하는 경우에 대해 3차원 동적해석을 수행하여 복층터널 중간슬래브의 동적거동을 분석하도록 한다.
2. 차량하중 및 접속부재
2.1 차량하중 모형
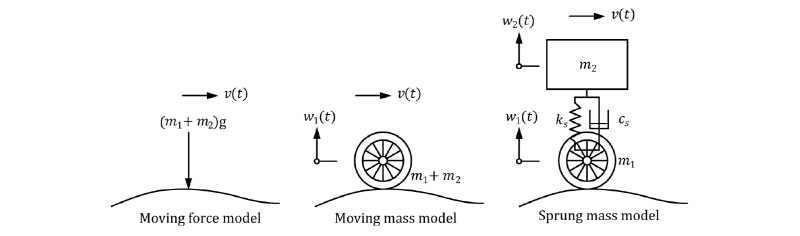
차량의 이동하중에 의한 해석적 연구들은 주로 주행하중 모형 및 주행질량 모형에 의하여 수행되었고, 보다 발전된 방법으로 교량 처짐과 노면조도를 포함하는 차량의 운동방정식을 이용하여 차륜․노면사이의 상관력을 고려하는 주행차량 모형해석이 있다.
주행하중 모형과 주행질량 모형으로 교량의 진동해석을 수행하는 방법은 Frÿba (1968)와 Biggs et al. (1959)가 일정한 속도, 하중 및 질량을 교량에 적용하면서 최근에 이르기까지 많이 사용되고 있다. 2자유도 주행질량 모형의 경우 Honda et al. (1982)에 의해 단순교와 연속교에 적용하였으며, 주행하중 모형의 경우 Wu와 Dai (1987)는 연속교에 적용하였으며 Inbanathan와 Martin (1989)는 상자형 단면의 단순교에 적용하였다.
주행차량모형을 적용한 경우로는 Huang et al. (1995)이 4자유도 차량 모형을 3경간 연속교에 적용하여 동적응답을 구하였다. Frÿba (1999)는 2자유도와 4자유도의 차량모형을 단순교에 적용하였으며 Gupta (1980)와 Trail-Nash와 Gupta (1980)는 4자유도의 차량모형을 단순교에 적용하였다. Mulcahy (1983)는 2축 트럭과 3축 트레일러를 각각 4 자유도 및 7자유도의 차량모형으로 단순교에 적용하였다. 한편, Li와 Fafitis (1994)는 4자유도와 5자유도의 차량모형을 단순교에 적용하여 주부재의 피로응력범위를 구하는데 사용하였다. Hwang (1990)은 2축 트럭과 3축 트렉터-트레일러를 각각 4자유도와 6자유도를 갖는 차량으로 모형화하여 단순교에 적용하였다. Wang et al. (1991)은 7자유도의 2축 차량과 12자유도의 3축 트렉터-트레일러를 3차원으로 모형화하고 격자요소와 보요소를 사용하여 다중형 단순교를 모형화하여 동적응답에 관한 연구를 수행하였다. Huang et al. (1995)은 AASHTO 설계 차량 하중인 HS20-44를 11 자유도로 모형화하여 종방향 경사와 횡방향 경사가 있는 경우의 강 상자형교와 강판형교의 동적거동에 대하여 연구하였다.
2.2 접속부재 모형
복층터널 중간슬래브와 라이닝과의 접속부에서 회전, 이동 및 신축변형 거동을 원활하게 수용할 수 있는 대표적인 접속부재로 격리장치가 있으며 주로 지진격리장치에 대해 연구가 진행되어 왔다. 초기에 Hwang (1990)은 지진격리장치로써의 격리 받침에 대해 지진하중에 대한 응답을 여러 가지 등가선형 해석모형으로 평가하였다. 하지만 최근에는 탄소성 및 마찰형 지진격리장치 등의 비선형 거동을 구현할 수 있는 다양한 상용프로그램이 선보이면서 다양한 분야에 널리 사용되고 있다.
격리받침은 그 형태에 따라 Fig. 2와 같이 크게 2가지로 구분되는데, 고무의 전단강성과 감쇠를 이용한 탄성받침(Elastomeric bearings, Rubber bearings) 계열과 PTFE (Poly-tetra-fluor-ethylene)와 스테인레스판 사이의 마찰감쇠를 이용하고 별도의 복원장치를 갖는 미끄럼받침(Sliding bearings) 계열로 구분할 수 있다.
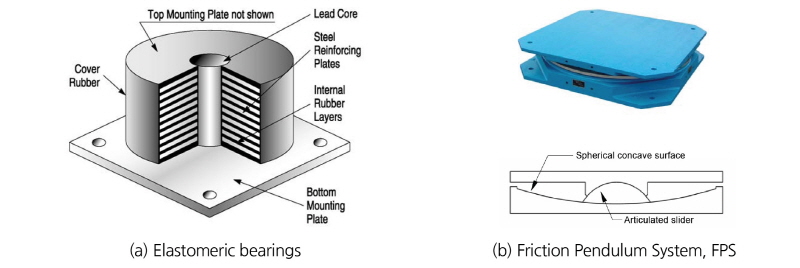
탄성받침 계열은 고무판과 철판의 적층구조로 제작되며 감쇠능력을 증대시키기 위하여 고감쇠 고무를 이용하거나 내부에 납봉을 삽입하기도 한다. 현재 당산철교 및 광안대교를 포함한 수백여 개의 국내 교량과 일부 건축물, 인천 LNG저장탱크 및 프랑스 아레바사의 원자력발전소 등에 설치된 바 있다. 미끄럼받침 계열로는 미국의 EPS (Earthquake Protection Systems, Inc.)에서 개발한 마찰진자형 격리받침 (Friction Pendulum System, FPS)이 있다. FPS는 마찰감쇠와 복원기능을 함께 갖춘 격리장치로 다수의 교량과 건축물 및 LNG저장탱크 등에 적용되었다. PTFE를 이용한 미끄럼받침 계열의 격리장치는 구소련(Makris et al., 1991)을 비롯하여 일본, 이탈리아, 미국 등지에서 사용된 바 있다. 미국에서는 최근에 기존 구조물의 내진성능을 향상시키기 위해 사용되고 있으며, 이탈리아에서는 총 연장 150 km 이상의 교량에 미끄럼받침 계열의 격리장치가 여러 가지 종류의 복원장치와 함께 사용된 예(Medeot, 1991)가 있다. 국내에서도 지난 2002년 상반기에 전남소재의 지도-사옥간 연육교에 감쇠력을 제공하는 마찰포트받침과 복원력을 제공하는 탄성받침을 조합하여 시공한 사례가 있으며, 현재 다수의 교량이 이와 같은 형태로 시공된 상태이다. 이러한 격리장치는 하중의 고른 분산과 이동하중에 의한 회전 및 이동, 온도신축변위를 원활하게 수용하여 불필요한 응력집중 및 진동의 발생을 방지할 수 있으므로 복층터널 중간슬래브 양 끝단에 적용하기에 적합한 부재이다. 복층터널 슬래브에 적용하는 격리장치로는 탄성받침 계열을 우선적으로 고려할 수 있다. 미끄럼받침 계열의 경우 마찰력으로 갑자기 미끄러지는 현상(stick slip)이 발생하고 이로 인해 구조 진동이 발생한 사례가 종종 발생하고 있어 신중히 검토해야 한다.

3. 중간슬래브의 동적응답해석
차량의 주행에 의한 복층터널 중간슬래브의 동적거동은 중간슬래브 및 차량의 동특성, 주행노면의 요철상태, 주행차량의 속도와 통행특성 등 여러 요인에 의해 지배를 받는다. 이러한 동하중에 의한 효과를 도로교 설계기준에서는 충격계수를 적용하여 설계에 반영하고 있으나 복층터널의 중간슬래브는 교량과 상이한 지지형태를 가지고 있어 별도의 검토가 필요하다. 따라서 본 연구에서는 주행차량에 의해 복층터널 중간슬래브에서 유발되는 실질적인 동하중 효과를 수치해석적으로 평가하기 위해 차량 주행에 의한 시간이력해석을 수행하였다. 중간슬래브 단면에 대하여 3차원 유한요소해석 요소망을 작성하고 노면조도, 주행속도 및 터널 라이닝과의 연결방법 등을 변화시켜가며 동적해석을 실시하고 동하중 효과를 분석하였다.
3.1 해석모형
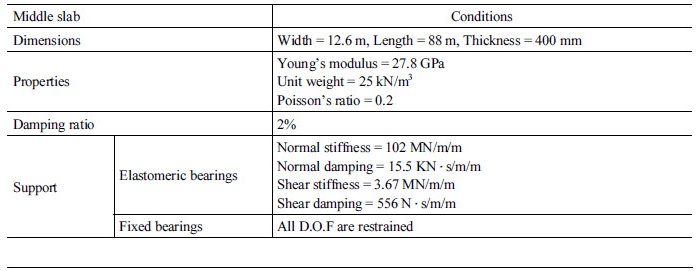
중간슬래브는 주행차량에 의한 거동을 입체적으로 파악하기 위해 4절점 Shell 요소를 사용하여 폭 12.6 m를 갖는 길이 88 m의 판형태로 모형화하였다. 주행방향의 양 측면에 위치하는 라이닝과의 연결부는 강결연결(Fixed bearings, FB) 조건과 진동에 대해 상대적으로 우수한 특성을 가지는 탄성받침(Elastomeric bearings, EB) 지지조건의 적용을 가정하였다. 강결연결의 경우 중간슬래브 측면 단부의 방향별 자유도를 모두 구속하도록 경계조건을 설정하였으며, 탄성받침은 수직과 수평방향으로 강성과 감쇠를 갖도록 spring과 dash-pot 요소로 모형화 하였다. 중간슬래브 유한요소 해석모형은 Fig. 3과 같고 모델링 조건 및 물성은 Table 1과 같다.
3.2 차량 모델(Vehicle model)
차량은 차체와 서스펜션 시스템 등으로 이루어져 있으며 집중질량(lumped mass), 스프링 및 감쇠장치를 고려하여 Fig. 4와 같이 모형화 할 수 있다. 이동하중모형(moving force model)은 차량의 관성력(inertia force)이 차량의 자중보다 훨씬 작을 때 유용하며 차량이 등속으로 중간슬래브 위를 주행할 때 차량의 관성력은 주로 중간슬래브의 변형과 노면의 불균질한 조도에 의해 발생한다. 스프링 상질량 모형(spring-mass model)은 실제 여러 축을 가진 차량을 한 개의 축으로 모형화하여 동적 해석에 적용하며 차량의 축간거리보다 중간슬래브의 길이가 훨씬 긴 경우에 대해 유효하며 일반적인 경우 이에 해당한다. 본 연구에서는 스프링 상질량 모형(spring-mass model)을 사용하였으며 차량의 주행속도를 30 km/hr 에서 90 km/hr 까지 10 km/hr 씩 증가시켜가며 해석을 수행하였다. 또한 차량모델의 제원은 다음 Table 2와 같다.

3.3 노면 조도(Surface roughness)
도로의 노면조도는 도로 노면의 시공기면으로부터의 수직변위로 각기 다른 파장을 갖는 무수히 많은 파형의 연속으로 구성되어 있다고 볼 수 있다. 이러한 파장의 유형은 수 mm 의 매우 짧은 것에서부터 수백 m 까지 그 폭이 매우 넓으나, 주행차량에 영향을 미치는 파장의 길이는 보통 0.1~100 mm 정도이고, 진폭은 일반적으로 0.1 ~ 10 cm 정도의 범위로 볼 수 있다(Dodds and Robson, 1973). 도로의 평탄성에 크게 영향을 미치는 것은 진폭으로 진폭이 크면 도로의 평탄성이 그만큼 불량하다고 말할 수 있다. 불량한 노면 조도는 승차감을 나쁘게 할 뿐만 아니라 주행차량의 동적 하중을 증가시켜 포장면의 파손과 교량의 동적 거동을 증폭 하는 원인이 되고 있다.
도로 노면의 평탄성을 평가하는데 많이 사용되는 국제평탄성지수(International Roughness Index, IRI)는 노면 평탄성 측정단위에 대한 국제 표준화를 도모하기 위하여 1982년 브라질에서 수행된 국제도로평탄성실험(International Road Roughness Experiment, IRRE)에서 채택되었다. 이러한 측정단위는 일정 구간에 대한 노면 요철의 크기를 평균치로 나타내기 때문에 상대적 비교에는 편리하고 재현성이 매우 높은 것으로 알려져 있다(Sayer and Karamihas, 1998). 그러나 IRI의 값으로는 인공적인 노면조도를 생성시킬 수 없다. Dodds와 Robson (1973)은 노면 조도계수를 사용하여 여러 가지 종류의 도로에 대한 분류표를 제안하였다. 이 방법에서는 여러 가지 종류의 도로에 대한 노면조도를 PSD로 나타내어 노면 조도계수를 구하고 이들 노면 조도계수에 따라 도로의 종류를 분류하는 방법이다. 또한, 이 방법은 노면조도의 PSD를 사용하여 인공적으로 노면조도를 생성시킬 수 있는 장점이 있다. 따라서 본 연구에서는 불규칙 변동인 노면조도를 재현하는데는 PSD 함수를 사용하였으며 식으로 표현하면 아래와 같다.

여기서,  ,
,  ,
,  ,
, 

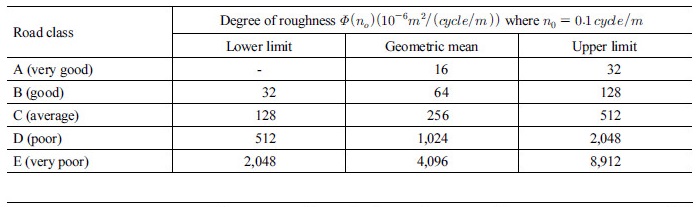
ISO 8608 (1995)에서는 Table 3과 같이 노면조도를 5개의 등급으로 분류하였으며, 본 연구에서는 이 분류에 따라 노면조도를 생성하였다.
주어진 도로를 일정속도로 주행한다면 노면의 임의 형상(random profile)은 식 (2)와 같이 sine 함수의 중첩에 의해 가정할 수 있다.
여기서,  : distance along the road (m)
: distance along the road (m)
 : random phase angel following a uniform distribution from 0 to 2
: random phase angel following a uniform distribution from 0 to 2
 는 식 (3)과 같다.
는 식 (3)과 같다.

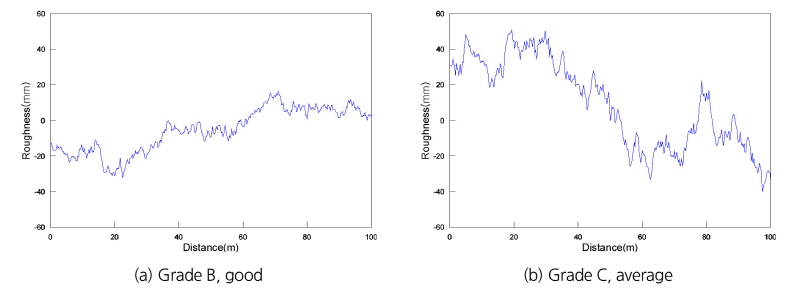
위의 과정을 거쳐 생성한 노면조도의 양호한 상태(B, good)와 보통의 상태(C, average)를 도시하면 Fig. 5와 같다.
4. 해석 결과
중간슬래브를 3차원 유한요소망으로 구성하고 지지형태에 따른 중간슬래브의 모드형상과 고유진동수 등의 확인을 위하여 모드해석을 수행하였다. 또한 노면조도와 차량에 대해 모형화하고 중간슬래브의 해석모델과 결합하여 직접적분법에 의한 주행속도별 동적해석을 수행하였다. 그리고 동적해석과 정적해석에 의한 응답을 이용하여 동적확대계수를 산정하고 해석변수에 따른 변화를 분석․검토하였다.
4.1 모드해석
지지형태별로 모드해석을 수행하였으며 종방향으로 유사한 모드형상에 대해 정리하면 Table 4와 같다.
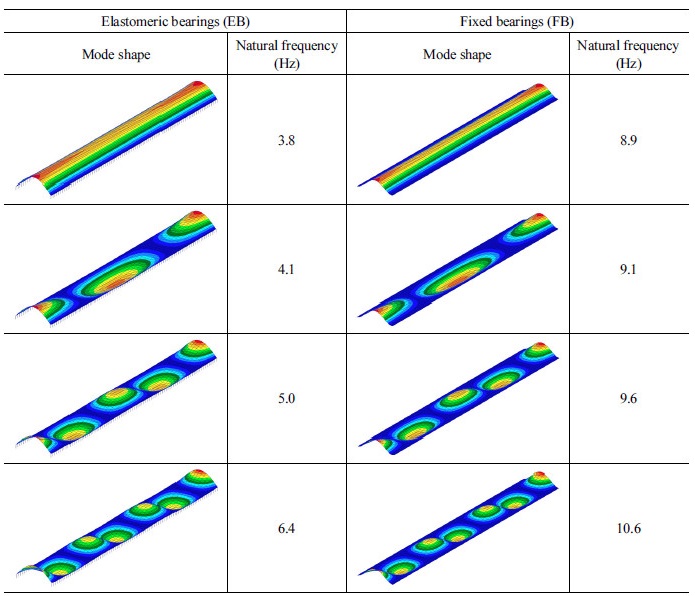
일반교량의 경우 종방향으로 지점이 형성되나 복층터널의 중간슬래브는 횡방향으로 지점이 위치하여 건축물의 바닥슬래브와 유사한 모드형상을 갖는다. 횡방향(차량주행의 직각 방향) 단면의 첫 번째 모드형상을 살펴보면 탄성지지와 강결지지의 경우 각각 단순지지보 및 양단고정보의 1차모드와 유사하게 나타났다. 종방향(차량주행 방향) 단면으로 모드형상이 비슷한 경우에 대해 고유진동수를 살펴보면 강결의 경우가 탄성받침 지지의 경우에 비해 진동수가 최대 134.2% 크게 나타나며, 동적 응답의 주파수 특성에 주요한 영향을 미친다.
4.2 동적응답 해석
중간슬래브 구조물과 차량모델로 구성된 유한요소 해석모델을 바탕으로 지지형태, 노면조도 및 차량의 주행속도 등을 변화시켜가며 동적해석을 수행하였다. 일반적으로 주행속도의 변화에 따른 교량에서의 응답은 반드시 속도에 비례하여 증가하지는 않는 것으로 알려져 있으므로 설계속도에서 뿐만 아니라 설계속도 이하에서의 검토도 필요하다. 따라서, 80 km/hr를 설계속도로 가정하여 최저 30 km/hr 에서 최고 90 km/hr 까지 10 km/hr 간격으로 동적해석을 수행하고 중간슬래브를 종방향으로 중앙부와 종점부에서 동적응답을 분석하였다.
4.2.1 중앙부(시점 기준 44 m지점)
중앙부에서의 연직 처짐량에 대하여 주행속도별 최대동적응답과 정적응답의 비(동적확대계수, Dynamic Magnification Factor)는 Fig. 6과 같다.
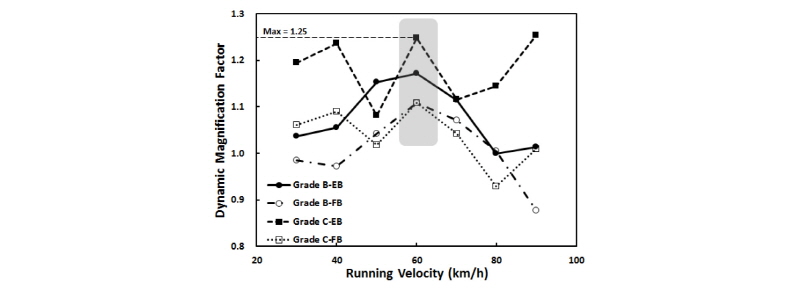
최대동적응답은 주행속도 60 km/hr 에서 발생하였으며 양호한 노면조도에 비해 보통의 노면조도(Grade C)에서 크게 발생하는 경향을 보인다. 노면상태가 양호한 경우 속도의 변화에 따른 응답의 특성을 살펴보면 저속에서 60 km/hr 까지 주행속도가 높아짐에 따라 증가하다가 이후 다시 감소하는 경향을 보인 반면, 노면상태가 보통인 경우에는 주행속도에 따라 동적응답이 불규칙하게 나타났다.
지지형식에 따른 응답을 살펴보면 대체로 탄성지지의 경우(EB)가 강결인 경우(FB)에 비해 크게 나타났으며, 이는 강결로 인하여 중간슬래브가 터널 전체 라이닝과 일체거동 함으로써 차량의 주행으로 인한 동적영향이 작아졌기 때문으로 판단된다.
노면상태가 보통의 상태(Grade C)이고 지지조건이 탄성지지인 경우 주행속도 60 km/hr 에서 동적영향이 25% (DMF=1.25)로 가장 크게 나타났으며, 노면조도를 양호한 상태(Grade B)로 유지할 경우 그 영향은 17% 로 감소함을 알 수 있다. 또한 속도의 변화에 따른 동적응답의 변화 양상은 주로 노면조도에 의해 영향을 받으며 지지형식은 동적응답 크기에 영향을 미치는 것으로 파악되었다.
동적응답이 큰 탄성받침 지지시 주행속도 50 km/hr, 60 km/hr 및 70 km/hr 에서의 시간이력 해석결과를 도시하면 Fig. 7과 같다. 차량이 중간슬래브에 진입하는 초기에서는 주행속도나 노면조도가 변화하더라도 중앙부 수직 처짐은 유사하게 거동하며, 차량이 중앙부로 접근함에 따라 노면조도에 따라 점차로 응답의 차이가 커지는 것을 확인할 수 있다. 차량이 중앙부를 지나 종점부로 가면서 중앙부의 처짐량은 감소하기 시작하며 종점부를 지나 중간슬래브를 완전히 이탈한 후 순간적으로 처짐의 진폭이 증가하고 이후 자유 진동하는 것을 알 수 있다. 즉 차량이 중앙부에 접근함에 따라 응답의 진폭이 증가하는 경향이 나타나며 이러한 특성은 양호한 노면상태에 비해 보통의 노면상태에서 보다 뚜렷해지면서 최대동적응답값이 더 커진다. 조면노도에 따른 동적 처짐은 슬래브 중앙부에서 크게 발생하는 특성을 나타내었으며 그 최대값의 차이는 노면조도의 차이(Grade B, C)보다는 동일한 노면조도 조건일 때 차량속도차이에 더 크게 의존하는 경향을 보였다. 또한 주행속도가 높아지면서 중앙부의 최대처짐이 발생하는 시점과 종점부를 통과하는 시점이 빨라지며 속도의 변화에 따른 응답의 변화가 보통의 노면상태에서 더 크고 복잡하게 나타난다.
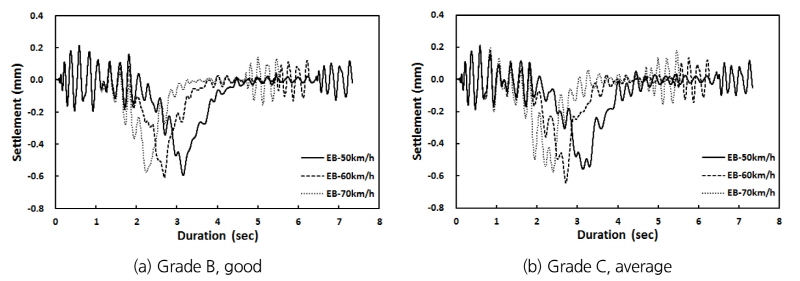
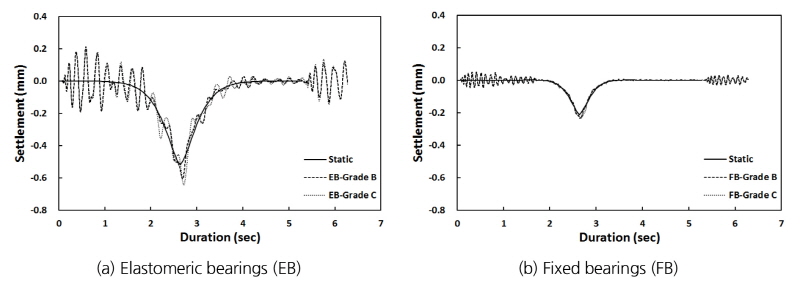
Fig. 8은 주행속도가 60 km/hr 일 때 중앙부에서의 정적응답과 동적응답을 함께 도시한 것이다. 차량이 중간슬래브에 진입하는 초기의 응답을 살펴보면 강결연결 조건 시의 지배적인 주파수대역이 탄성받침 지지시에 비해 상대적으로 높게 나타나는 것을 확인할 수 있으며 이는 강결연결 조건 시 중간슬래브의 고유진동수가 탄성받침 지지시에 비해 증가하기 때문으로 판단된다. 탄성받침 지지조건 시의 응답을 살펴보면 노면조도가 양호인 경우에 비해 보통인 경우에서 응답의 최대 약 200% 까지 진폭이 증가하며 이로 인해 최대동적 처짐량도 증가함을 알 수 있다.
4.2.2 종점부(시점 기준 88 m 지점)
종점부에서의 연직 처짐량에 대하여 주행속도별 동적확대계수를 구하면 Fig. 9와 같다.
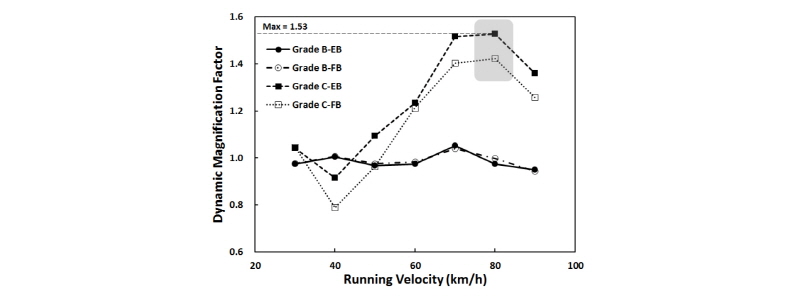
노면상태가 양호한 경우의 최대동적응답은 주행속도 70 km/hr에서 5% 이내로 나타났으며 속도에 따른 변화량은 크지 않고 정적응답에 가까운 처짐량을 보였고, 주행속도 40 km/hr, 70 km/hr(탄성지지, Grade B)에서는 정적응답에 비해 동적응답이 오히려 작게 산정되었다. 노면상태가 보통인 경우 주행속도 40 km/hr에서 동적영향이 최소로 나타났으며 이후 주행속도 80 km/hr까지 속도가 증가함에 따라 동적영향도 증가하고 처짐량의 변화폭도 크게 나타났다.
지지조건에 따른 응답을 살펴보면 노면상태가 양호한 경우에는 차이가 거의 없으며 노면상태가 보통인 경우에 탄성받침 지지조건의 경우가 강결연결 조건인 경우에 비해 크게 나타났다. 동적영향은 강결의 경우 주행속도 80 km/hr에서 약 42% 로 나타났으며 탄성받침 지지의 경우 동일 속도에서 53% 로 최대값을 나타내었다. 이는 역시 강결로 인하여 중간슬래브가 터널 전체 라이닝과 일체거동 함으로써 차량의 주행으로 인한 동적영향이 작아졌기 때문으로 판단된다. 종점부에서 속도의 변화에 따른 응답의 양상에 가장 큰 영향을 미치는 요인은 노면조도이며, 지지조건은 이러한 응답 양상의 크기에 영향을 미치는 경향을 보인다.
종점부에서 동적영향이 크게 나타나는 조건에서 시간이력 특성을 고찰하고자 보통의 노면상태(Grade C)와 주행속도 50 km/hr, 60 km/hr 및 70 km/hr 에 대한 시간이력 해석결과를 Fig. 10과 같이 나타내었다. 차량이 중간슬래브에 진입하는 초기에서는 주행속도가 변화하더라도 종점부 수직처짐은 유사하게 산정되며 차량이 종점부로 접근하면서 점차로 응답의 차이가 증가하는 것을 확인할 수 있다. 최대 처짐량이 발생하는 시점은 차량속도에 반비례하며 차량이 중간슬래브를 벗어난 이후 자유진동하면서 서서히 응답이 감소하는 것을 확인할 수 있다.
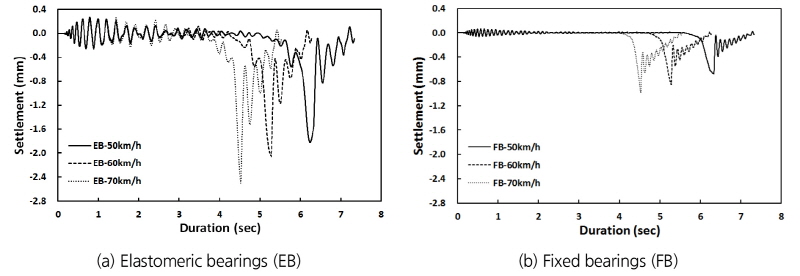
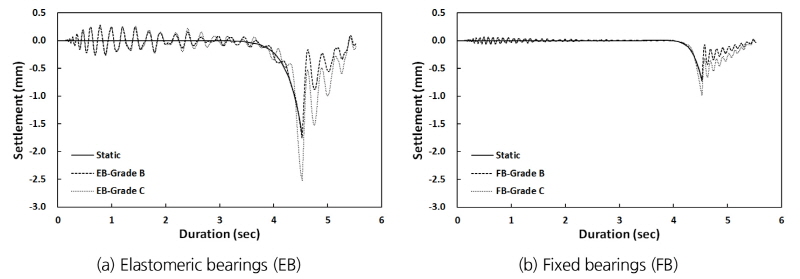
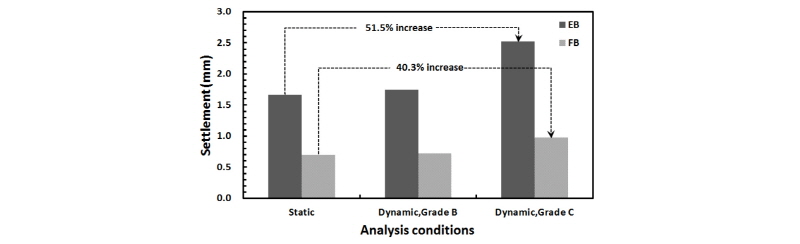
Fig. 11에서 주행속도가 70 km/hr 일 때 종점부에서의 정적응답과 동적응답을 함께 도시하였다. 중앙부에서의 응답에서도 확인한 바와 같이 탄성받침 지지조건 시 응답이 강결연결 조건 시 응답에 비해 지배적인 주파수대역이 상대적으로 저주파수이며, 이는 강결연결 조건 시 중간슬래브의 고유진동수가 높아지기 때문에 발생하는 현상이다. 노면상태가 양호한 경우(Grade B) 최대 처짐량이 탄성받침 지지조건 시 5.2%, 강결 연결조건 시 3.9% 증가함으로써 처짐량 증폭의 기여도가 낮은 반면, 보통의 노면상태(Grade C)에서는 최대 처짐량이 탄성받침 지지조건 시 51.5%, 강결 연결조건 시 40.3% 증가함으로써 처짐량 증폭의 기여도가 상대적으로 크게 나타났다. 보통의 노면상태에서 주행속도가 70 km/hr 일 때 종점부에서의 정적처짐과 동적처짐의 최대치를 비교한 결과는 Fig. 12와 같다.
5. 결 론
중간슬래브 구조, 지지형태, 노면조도, 차량의 동적특성 및 주행속도 등을 고려하여 3차원 유한요소해석 모델을 작성하여 모드 해석 및 차량과 중간슬래브 간 상호작용을 고려한 동적해석을 수행하고 해석결과를 분석하여 얻은 결론은 다음과 같다.
1.탄성받침 지지조건과 강결연결 조건에 대해 종방향으로 유사한 형태의 모드형상에 대해 고유진동수를 비교한 결과 강결연결 조건에서 최대 134.2% 증가하였다.
2.동적영향을 대표하는 동적확대계수는 중간슬래브 중앙부에서 탄성받침 지지조건 주행속도 60 km/h 이고 노면조도 보통(Grade C)인 경우에 최대 1.25, 종점부에서는 탄성받침 지지조건, 주행속도 80 km/h 이고 노면조도 보통인 경우(Grade C)에 최대 1.53의 값을 보여 탄성받침 지지조건 및 보통의 노면조도 조건에서 동적응답이 가장 크게 증폭되는 경향을 보였다. 추후 설계적용시 조면노도에 따른 다양한 해석을 수행하여 설계시 동적 응답치에 대한 보수적인 값을 적용하는 것이 바람직할 것으로 판단된다.
3.중앙부의 동적영향은 탄성받침 지지조건에 비해 강결 지지조건에서 작게 나타났으며, 탄성받침 지지조건의 경우 노면조도가 양호한 경우에 비해 보통인 경우가 크게 나타났다. 종점부에서의 동적영향은 노면상태에 의해 크게 영향을 받았으며 보통의 노면상태에서 탄성받침 지지조건 경우가 강결연결 조건인 경우에 비해 약 10% 큰 53% 로 나타났다.
4.종점부의 동적처짐 검토결과 노면조도가 양호한 경우(Grade B) 최대 처짐량이 탄성받침 지지조건 시 5.2%, 강결연결 조건 시 3.9% 증가함으로써 처짐량 증폭의 기여도가 낮은 반면, 보통의 노면조도(Grade C)에서는 최대처짐량이 탄성받침 지지조건 51.5%, 강결연결 조건 시 40.3% 증가함으로써 처짐량 증폭의 기여도가 상대적으로 크게 나타났다.
5.중간슬래브의 동적영향은 양호한 노면조도와 강결연결 조건에서 작게 관측됨을 확인하였다.
