
1. 서론
2. 터널 검측시스템의 비교 분석
3. 상용 레이저 스캐너를 통한 터널 라이닝의 표현
4. 터널 레이저 스캐너 시작품 개발
4.1 레이저의 특징 및 활용
4.2 철도 터널 스캐너의 요구사항 및 측정 방식
4.3 철도 터널 스캐너 시작품 상세
4.4 시스템 검증 및 적용
5. 결론
1. 서론
기술개발의 발전으로 인하여 건설 분야에도 다양한 첨단기술의 적용이 이루어지고 있으나 예기치 않은 사고 또한 존재하는 것이 현실이다. 특히, 지하철 및 고속철도 등의 공공터널의 경우 사고발생시 많은 인명피해가 발생할 수 있으므로 구조물 안전에 만전을 기해야 할 것이다. 모든 구조물은 노출되는 외부환경 및 재료적인 요인에 의하여 시간이 경과하면서 열화 및 손상이 발생하게 된다. 이렇게 노후화 되는 구조물의 기능을 유지하고 수명을 연장시키기 위해서는 지속적이고 정기적인 관리와 효율적인 점검 및 진단을 실시하여 그 본래의 기능이 유지될 수 있도록 하여야 한다. 점검 및 진단을 수행하는데 있어서 기존 방법은 대부분 인력에 의한 육안조사에 의존하고 있어 정량화가 어렵고 객관성이 결여된다. 특히 고속철도의 경우 고속반복 주행에 따라 결함이 타 구조물에 비해 증가 될 가능성이 크므로 안전성에 각별한 주의가 요구된다. 또한 조사된 정보가 문서로 보관되므로 효율적인 데이터의 관리 및 분석이 용이하지 않다. 이러한 문제점을 해결하기 위해서는 자동화된 터널 검측 시스템의 개발이 요구되는 실정이다. 본 논문에서는 터널 검측 자동화 시스템 개발의 일환으로 기존의 터널 스캐너에 대한 비교 분석과 장단점의 파악 및 이를 바탕으로 철도터널에 적합한 터널 스캐너 시작품의 개발 그리고 개발된 시작품의 적용성 검증을 위하여 여러 형태의 공용중인 터널에 대한 스캐닝이 수행되었다.
2. 터널 검측시스템의 비교 분석
국내외 터널 검측 자동화 시스템은 크게 영상, 레이저, 열적외선 등을 이용한 시스템으로 구분할 수 있다(Haack 등, 1995; Richards, 1996). 특히 그중에서 영상(Sasama 등, 1998)과 레이저를 이용한 검측 시스템(Lindenbergh 등, 2005; Girardeau-Montaut 등, 2005)이 현재 개발 및 상용화중이다. 이 두 시스템을 중심으로 기술개발 사례를 소개하며 국내 철도환경에 맞는 시스템 구축을 위한 조사 내용을 소개하고자 한다.
영상을 이용한 시스템은 국내외에서 개발이 진행되어 현재 사용되고 있다. 스위스의 TS360B, 일본의 TML, 국내에서는 몇 개의 기관에서 상용화된 제품을 판매하고 있다. 이상의 시스템은 영상을 획득할 수 있는 카메라(고성능 비디오 카메라 혹은 라인카메라)와 터널 라이닝 표면에 일정한 광원을 조성하는 조명장치 그리고 검측 차량으로 구성된다. 영상을 이용한 시스템은 카메라의 해상도에 의존적이긴 하나 상당히 높은 정밀도와 해상도를 가진 시스템을 구성할 수 있다. 다만 제약점으로는 영상을 이용한 시스템의 경우 항상 광원이 필요하므로 검측 이전에 조명의 설치가 필수적이며 터널 라이닝의 표면이 깨끗하지 않은 경우 검측이 불가능할 수도 있으며 사전 조명장치등의 설치 작업이 요구되며 터널의 형상에 따라 초기 세팅을 바꾸어 주어야 하는 단점이 있다.
레이저를 이용한 터널 스캐닝 시스템의 경우에는 이탈리아의 Technogamma사에서 개발된 시스템이 있으며 국내에서는 전무한 실정이다. 레이저를 이용한 시스템의 경우 기존에는 레이저 신호를 터널 원주 방향으로 송신하여 돌아오는 도달시간으로 거리를 측정하는 방식(TOF, Time of Flight)으로 터널의 건축한계 및 제원의 측정이 가능한 시스템이었다. 과거 저성능을 기반으로 개발된 레이저 스캐너의 경우에는 터널 라이닝의 상태평가는 할 수가 없으며 건축한계에 대한 측정만이 가능하다. 그러나 최근 개발되고 있는 레이저 스캐너의 경우에는 기존 시스템에서 진일보하여 3차원 스캐닝을 기본으로 하기 때문에 터널 라이닝에 대한 세밀한 묘사가 가능한 것이 개발되었다. 이러한 레이저 시스템을 사용할 경우에는 카메라를 이용한 시스템과 달리 광원이 필요치 않으므로 사전 조명 설치 과정의 생략이 가능하며 터널의 상태(가시여부)에 상관없이 측정이 가능하다. 따라서 레이저 스캐너의 경우 카메라 방식에 비해 능동적인 모니터링 시스템을 구성할 수 있다. 또한 레이저 스캐너를 통한 터널 검측의 결과는 철도를 구성하는 타 시설물(궤도, 전차선로)에 대한 검측과 상호 호환이 가능하여 선로위치별 각 구조물의 상태와 연계되는 종합 유지관리 시스템의 개발에도 유리한 이점이 있다. 이상이 내용에 대해서 영상과 레이저를 바탕으로 하는 터널 스캐닝 시스템에 대한 비교분석의 내용은 표 1과 같다.
3. 상용 레이저 스캐너를 통한 터널 라이닝의 표현
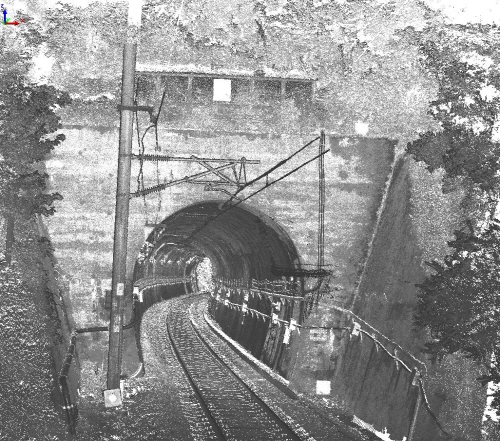
레이저와 영상을 이용한 시스템은 앞서 살펴본 바와 같이 각각의 장․단점이 있다. 특히, 시스템 적용에 있어 중요한 부분은 철도 시설물 검측에 있어 타 분야와의 호환성과 작업의 용이성이다. 따라서 비록 정밀도는 상대적으로 낮으나 레이저를 이용한 측정 방법이 철도시설물(궤도, 전차선, 터널) 검측을 위한 검측시스템 개발에 있어 더 효과적일 것으로 판단된다. 이상의 분석 내용을 확인하기 위하여 기존의 상용 레이저 스캐너를 이용하여 터널 라이닝에 대한 검측을 시도하였다. 본 연구에서 사용한 제품은 캐나다 Optech사의 ILRIS-3D이며 ILRIS-3D를 이용하여 중앙선 지평터널의 라이닝에 대한 스캐닝을 실시하였다. 터널 전체의 모형을 만들기 위하여 터널의 전방 및 후방 갱구부 좌, 우측에서 각 1회, 합계 4회의 스캔을 실시하였으며 그림 1은 스캐닝이 수행된 영역을 나타내며 사각형 박스내부 영역이 스캔되었다. 전체 터널 스캐닝 과정은 (1) 현장스캐닝, (2) 에러 포인터 제거, (3) 삼각망 표면 모델 구성, (4) 스캔 합성의 과정을 거친다.
이상의 과정을 통하여 제작된 스캐닝 이미지는 그림 2와 같다. 스캐닝 결과를 표현해 보면 마치 흑백영상의 형태로 나타난다. 이러한 표현은 레이저 스캐닝한 데이터를 표현하는데 있어 고저차이의 발생을 음영으로 표현하는 기법(hill shade)을 적용한 것으로서 이미지 상에서는 전차선로, 궤도, 그리고 터널 내 시설물이 측정되는 것을 알 수 있다. 비록 개략적으로 표현되기는 했지만 궤도 및 전차선로에 점검 목적으로의 사용 또한 어느 정도 가능함을 나타내고 있다.
보다 조밀한 데이터의 형성을 위하여 좁은 영역에 대한 스캐닝을 실시하였다. 스캐닝 결과는 그림 3에서 확인할 수 있는데 여기서 영상과 레이저 방식의 비교를 할 수 있다. 그림 3(a)는 스캐너에 장착된 카메라로 촬영한 것이며 터널내 라이닝의 변단면 구간을 촬영한 것이다. 그림 3(a)의 사각형이 스캐닝 영역을 나타내고 있다. 사진상에서는 조명의 부재로 인하여 라이닝의 상태를 파악할 수 없는 상황이다. 그러나 그림 3(b)는 스캐닝 결과를 영상화 한 것으로서 라이닝 전면부에 있는 횡방향 파이프, 브래킷, 그리고 단면 확대부를 확인할 수 있으며 또한 라이닝의 콜드조인트 그리고 라이닝 손상이 발생한 부분을 확실히 구분할 수 있다. 이와 같이 레이저 스캐닝 시스템의 경우에는 영상을 이용한 시스템으로부터 확인할 수 없는 경우에도 데이터 취득이 가능한 경우가 있다. 그림 3에서 확인할 수 있듯이 터널 내에는 여러 시설물과 터널 라이닝 손상대가 공존하고 있음을 알 수 있다. 효율적인 유지관리를 위하여 스캐닝 결과로부터 시설물과 손상대에 대한 자동 검측 및 구분이 향후 수행 되어야 할 연구 내용으로 판단된다.
4. 터널 레이저 스캐너 시작품 개발
영상과 레이저 측정기술에 대한 비교분석 결과 정밀 스캐닝 측면에서는 영상을 바탕으로 하는 시스템이 레이저를 바탕으로 하는 시스템에 비해 장점이 있으나 측정데이터의 활용도 측면에서 레이저를 바탕으로 하는 시스템이 더 많은 가능성을 보인다. 따라서 본 연구에서는 레이저 기술을 기반으로 하는 스캐너 시작품을 개발하여 완제품에 대한 개발 가능성과 향후 연구 방향을 설정하고자 한다.
4.1 레이저의 특징 및 활용
레이저(Laser: Light Amplified by Stimulated Emission of Radiation)는 빛의 유도방출에 의한 광 증폭 현상이다. 원자 중에는 빛에너지 등을 받아들여 들뜬 준위로 될 때 이 준위에 머무는 시간이 긴 것이 있다. 크롬이온이 들어 있는 인공(人工)루비도 이런 성질을 가진 물질이며, 이 성질은 레이저광선을 만드는 데 중요한 성질이다. 이러한 물질에 빛에너지를 조사(照射)하여 들뜨게 하면 바닥준위(또는 하위의 들뜬 준위)에 있는 원자수보다도 상위의 들뜬 준위에 있는 원자수가 더 많아진다. 이 상태를 반전분포(反轉分布)라고 한다(Svelto와 Hanna. 1989; Hect, 1988)
물질(예를 들면, 인공루비 등)이 들떠서 반전분포 상태에 있을 때, 1개의 원자가 어떤 계기로 빛을 내면서 상위의 들뜬 준위로부터 하위의 들뜬 준위로 옮겨지면 다른 들뜬 원자도 자극되어 위상이 고른 같은 파장을 가진 빛을 차례차례 발생한다. 들뜬 물질의 양쪽에 거울 2개를 평행하게 놓으면 빛은 2개의 거울 사이를 반사하면서 몇 번씩 왕복한다. 그 동안 차례로 유도방출이 생겨 빛은 자꾸만 증폭된다. 2개의 평행한 거울은 유도방출을 일으킬 뿐만 아니라 거울 사이에 빛의 정상파를 만들고, 이 조건에 맞는 빛만을 증폭한다. 그 때문에 발생하는 빛의 파장은 선택되어서 하나로 된다. 이 때 2개의 거울 중 1개의 거울에서 대부분의 빛은 반사하지만 일부(몇 %)만을 투과하도록 만들어 두면 거울 사이에서 증폭된 빛의 일부를 외부로 꺼낼 수 있다. 레이저광선은 이렇게 하여 만들어진 빛이다. 이러한 과정을 통해서 생성된 레이저는 간섭성과 지향성이 좋으며 스펙트럼 순도가 매우 좋은 특성을 가지고 있다.
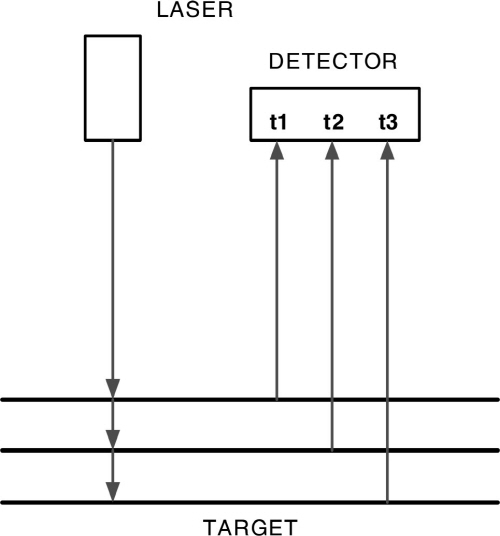
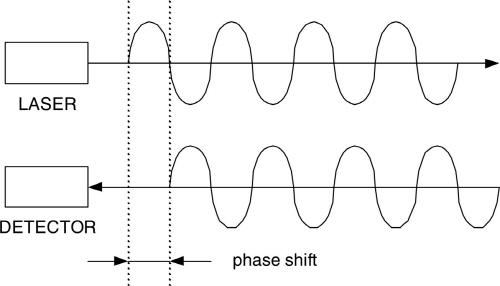
레이저를 이용한 비접촉 측정은 측정 대상에 레이저를 조사하고 측정 대상의 표면에서 반사되어 되돌아오는 레이저광을 광센서(light-detecting sensor)를 이용하여 감지, 분석하는 방법이다. 이를 위하여 일반적인 레이저 측정 시스템은 그림 4와 같이 송신부(transmitter), 수신부(receiver), 처리부(processor)로 구성된다. 레이저 거리 측정기(Laser Range Finder)는 레이저가 측정 대상의 표면에 반사되어 되돌아오는 반사광의 각도, 또는 소요시간을 이용하여 측정대상까지의 거리를 측정하는 장치이다. 이때 반사각을 이용하는 방법을 trian-gulation method, 비행속도를 이용하는 방법을 Time -Of-Flight(TOF) method라 한다. Time-Of- Flight 방식은 그림 5와 같이 측정 대상에 반사되어 수신기에 도달하는 레이저의 시차를 이용하는 방법으로서 그림 6과 같이 레이저에 시간 측정을 위한 신호를 변조(modulation)하여 송신하고 수신되는 레이저의 위상차(phase shift)를 비교하여 레이저의 비행시간을 간접적으로 측정한다.

4.2 철도 터널 스캐너의 요구사항 및 측정 방식
터널 스캐닝 시스템은 불리한 철도터널 환경에서 사용되는 계측 장비로서 터널내 환경, 철도운행 환경 및 운영조건에 부합하여야 한다. 따라서 계측기기의 정도, 반복 정밀도, 감도, 계측 범위와 신뢰도가 계측 목적에 적합하여야 하며, 구조가 간단하고 튼튼하며 설치가 용이하여야 할 것이다. 특히 사용자의 편의를 위하여 측정치에 대한 계산 과정이나 분석 절차가 간단하여야 한다. 또한 기후 변화나 물리적 피해를 견딜 수 있어야 하며 부식이나 전기적 방해 요인을 극복할 수 있어야 할 것이다.
이상의 성능을 기반으로 요구되는 기능으로는 (1) 터널 단면 측정, (2) 터널 구간 측정, (3) 터널의 삼차원 모델 구성, (4) 통과한계면 검출, (5) 가변측정 해상도, (6) 손상영역 자동 검지, (7) 터널 변상 감지, (8) 측정 데이터 변환, (9) 터널 영상 저장, (10) 터널 영상 3차원 렌더링 등을 들 수 있다. 현 단계에서 이상 언급한 조건을 모두 만족시키는 시스템의 구성은 불가능 하므로 개략적으로나마 포인트 데이터를 구성할 수 있는 시스템의 개발을 목표로 한다.
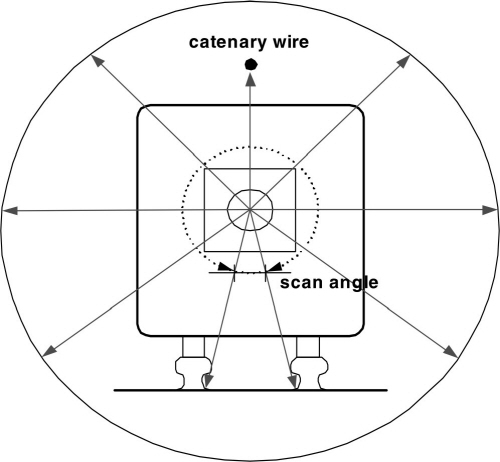
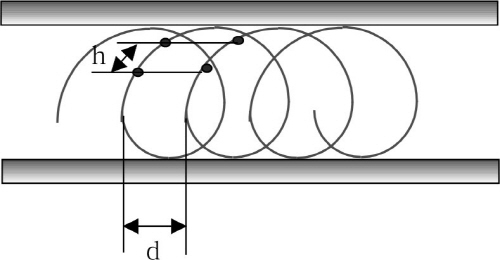
터널 스캐너는 차량탑재, 자율주행, 또는 휴대측정과 같이 현장의 상황과 측정 목적에 따라 선택될 수 있으나 차량탑재 측정의 경우 그림 7, 8과 같이 레이저에 의한 터널의 원주 방향 스캔이 가능하도록 차량의 전두부, 또는 후부 등 장애물이 없는 곳에 설치된다. 그리고 차량의 진행과 함께 회전하는 레이저 스캐너 헤드가 터널의 내부를 360° 스캔하며 터널 라이닝 및 시설물, 전차선, 궤도의 형상을 추출한다. 본 연구에서 사용한 레이저 센서의 기능은 원주방향으로 레이저 송수신 각도는 0.08°로서 한 원주 당 4096포인트를 생성한다. 따라서 철도 터널 스캐너가 열차에 탑재되어 주행하면서 측정할 경우 나선형의 궤적을 그리면서 측정하며 이때 직경 10m 원형 터널을 기준으로 할 경우 속도에 따른 각 점간의 간격은 그림 9와 같다.

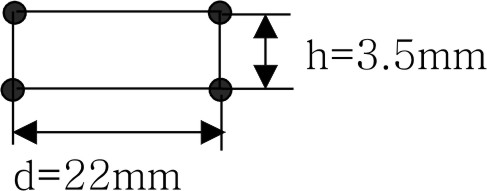
직경 10m 터널을 시속 1km/h로 주행할 경우 초당 277mm 이동하게 된다. 본 연구에서 사용한 레이저 센서의 경우(Acuity Research사의 AR-4000) 초당 50,000회의 데이터 측정이 가능하므로 1mm 진행시 약 181포인트가 측정된다. 또한 레이저 센서는 원주방향으로 회전하는데 원주 당 4096 포인트를 측정하므로 1mm 진행시 스캐닝 되는 부분은 약 16°가 된다. 결국 360° 회전하는 동안 22mm가 진행됨을 알 수 있다. 그림 9(b)에서 22mm는 진행방향으로의 나선간의 간격(d)가 되며 원주상의 간격(h)은 3.5mm가 된다. 결국 스캐닝 속도는 달리는 열차의 속도와 상관이 있으며 레이저의 측정빈도와 상관이 있음을 알 수 있다.
4.3 철도 터널 스캐너 시작품 상세
터널스캐너 시작품의 기능 모델은 그림 10과 같으며 구성 파트는 레이저 거리 측정부, 레이저 제어부, 구동대, 구동대 제어부, 스캐닝 제어부, 스캔 및 해석시스템으로 구성된다. 레이저 거리 측정부는 레이저에 의하여 측정 대상까지의 거리와 반사 강도(intensity)를 구하는 레이저 모듈로서 라인 스캐너와의 조합에 의하여 측정물의 표면을 분석할 수 있다. 레이저 제어부는 레이저 거리 측정부의 동작을 제어하는 제어부로서 측정의 시작과 종료, 측정 데이터의 수집의 기능을 수행하며, 구동대는 레이저 거리 측정부의 이송을 담당하며 구동대는(직교좌표 제어로봇) 단방향 등속 이동 기능을 제공한다. 본 시스템에서는 구동대의 총 길이를 80cm로 제한하였다. 구동대의 길이가 긴 경우 구동모터의 크기 및 시스템의 전체적인 크기에 영향을 미치므로 현재의 조건에서 최적의 길이를 산정하여 제작되었다. 구동대 제어부는 구동대의 제어를 담당하는 제어부로서 레이저 센서의 이동 및 위치 제어 기능을 수행하며, 스캔 제어부는 스캔 및 해석시스템으로부터의 측정 명령에 의하여 측정 과정을 제어한다. 이는 레이저 제어부와 구동대 제어부를 통하여 레이저 거리 측정기와 구동대의 동작을 통합 제어함으로써 이루어지며, 측정 데이터를 스캔 및 해석 시스템으로 전송하는 기능을 수행한다. 마지막으로 스캔 및 해석 시스템은 측정 기능을 위한 user interface의 기능, 사용자 명령에 의한 측정 제어 기능 및 측정 데이터의 분석 기능을 수행한다. 이상의 요소를 고려하여 제작한 철도터널 스캐너 시작품은 그림 11과 같다.


개발된 터널 레이저 스캐너의 경우 생성하는 데이터의 종류는 위치정보와 반사강도가 있다. 위치정보의 경우에는 신호가 반사되는 포인트에서의 X, Y, Z정보가 있다. 터널 스캐닝시 터널의 폭 방향은 X축 방향이며 터널의 높이 방향은 Y 방향 그리고 터널의 진행 방향(구동대의 진행방향)은 Z 방향이 된다(그림 12(a) 참조). 레이저 스캐너의 회전은 반 시계방향으로 돌며 레이저 스캐너를 원점으로 하여 1 사분면에서 모든 좌표값은 양의 값을 가진다.
4.4 시스템 검증 및 적용
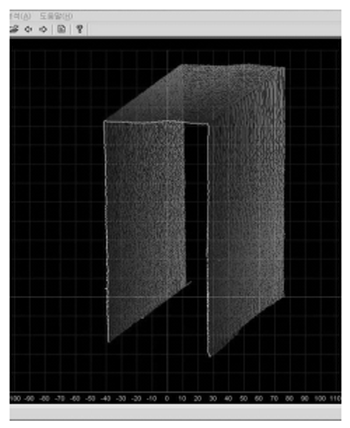
레이저 측정시스템의 정밀도는 여러 세부적인 요인에 의해 영향을 받을 수 있으며, 제작된 시스템의 검증은 중요한 단계이다. 검증절차를 위하여 실내에서 간단한 실험을 수행하였다. 실내에서의 환경은 실외보다 통제가 가능하며 일정한 조건(온도 및 광원등)을 유지할 수 있으므로 우선 시스템의 정밀도를 확인하기 위하여 임시 구조물을 제작하여 측정 정밀도를 확인하였다. 시작품 시스템에서 사용하는 Acuity사의 AR-4000 레이저 센서의 경우 50K의 측정빈도로 측정할 경우 최대 오차는 5mm로 보고되고 있다. 검증을 위하여 그림 12와 같은 구조물을 임시로 조립하였으며 치수를 측정하였다. 구조물은 몇 개의 파티션을 이용하여 조립되었다. 각 부분에 대한 치수는 레이저 스캐너가 내측을 계측하므로 내측치수를 측정하였다. 측정결과 임시 구조물의 폭은 67cm이며 높이는 121cm이다. 그리고 레이저 스캐너의 위치는 바닥에서 약 31cm 이격되어 있다. 이상의 제원을 가진 구조물에 대한 실험 결과 그림 13과 같은 형태의 결과가 측정되었으며 동일한 위치에서 수직방향의 치수를 확인한 결과 약 4mm의 오차가 발생하는 것으로 관측되었으며 이 값은 레이저 자체의 오차한계임을 알 수 있다.
이와 같은 시작품의 현장 적용성 평가를 위하여 실제 운용중인 철도 터널과 서울지하철 터널에 대한 스캐닝을 실시하였다. 우선 운용중인 철도터널의 벽면 및 상단의 전경은 그림 14(a) 및 (b)에 나타내었다. 그림에서 확인할 수 있듯이 여러 가지 종류의(전차선로, 가동브레킷, 전력공급용 파이프 라인) 터널 시설물이 부착되어 있음을 알 수 있다. 이에 대한 스캐닝 결과는 그림 14(c)에 도시되었으며 계측된 터널의 내측 크기의 한계는 표 2에 나타내었다. 측정 결과 터널의 제원은 폭 5.0m, 높이 5.9m임을 확인 할 수 있다. 또한 터널 시설물들이 정확하게 스캐닝 되는 것을 확인 할 수 있었다. 또한 그림 9에서 언급하였듯이 스캐닝 결과가 나선형으로 형성 되어 있는 것을 그림 15에서 확인할 수 있으며 하나의 프로파일이 생성되기 위해서 8mm의 진행이 필요함을 알 수 있다.
표 2. 대상 철도 터널 스캐닝 결과에 따른 터널의 측정 제원 | |||
값 범위 | 최소 | 최대 | 범위(range) |
터널 폭방향 (X, mm) | -2457 | 2509 | 4966 |
터널 높이방향Y (Y mm) | -447 | 5405 | 5852 |
터널 축 방향 (Z mm) | 0 | 800 | 800 |
반사강도(Intensity) | 0 | 252 | 252 |

그림 16은 지하철 터널중 박스형과 원형 터널을 대상으로 스캐닝한 결과로서 원형터널의 경우 터널폭과 높이는 6.3m와 6.9m이며 박스형 터널의 경우 폭 5.8m 높이 6.4m이다. 그리고 반사되는 신호강도의 범위는 0에서 208 사이의 값을 보였다. 그림 16(c)와 (d)는 반사강도의 수치를 gray scale에 따라서 나타낸 것으로서 터널 시설물 및 라이닝 재료에 따라 반사강도의 특성을 구분할 수 있다. 콘크리트의 경우 반사강도가 크며 철제나 플라스틱으로 제작된 시설물의 경우 난반사로 인하여 반사강도가 낮은데 이러한 부분이 고려되어 그림 16(c) 및 (d) 상에서는 흰색에 가까운 색으로 표현되었다. 이러한 특성을 고려하여 터널 내 시설물 및 라이닝의 분리가 가능할 것으로 판단된다.


5. 결론
본 연구에서는 터널의 검측에 있어 영상을 이용한 시스템과 레이저를 이용한 시스템의 상호 장단점을 비교하였으며, 근거리 측량용 레이저 스캐너를 이용한 터널 내․외부의 스캐닝, 터널 검측용 레이저 스캐너 시작품의 개발 및 개발 장비의 검증 및 활용성을 수행하였다.
기존의 터널 스캐너에 대한 장단점 분석을 위하여 영상측정 시스템과 레이저 측정시스템의 장단점을 분석하였다. 분석 결과, 레이저 스캐닝을 통하여 획득된 데이터의 경우 별도의 조명장치의 설치가 요구되지 않으며 측정된 데이터가 3차원 상대좌표값을 가지고 있으므로 라이닝의 표면뿐만 아니라 터널 내공의 크기 및 시설물들의 설치위치, 크기, 상태 등에 대한 정보를 추출할 수 있을 것이다. 반면, 영상 측정 시스템의 경우에는 레이저 스캐너에 비해 높은 정밀도가 강점인 것으로 판단되었다. 이상의 두 시스템의 장단점과 철도 시설물(궤도, 전차선로) 검측에 있어서의 호환성 등 다양한 항목에 대한 고려 결과 우선적으로 레이저 스캐너를 바탕으로 하는 터널 스캐닝 시스템 시작품이 제작되었다.
본 연구에서 제작된 시작품은 80cm의 구동대 상에서 작동하는 시스템으로서 초당 50,000번 신호를 받을 수 있는 레이저 센서를 사용하여 80cm 구간내 이동중에 스캐닝이 가능한 구조로 제작되었다. 제작된 시스템에 대한 검증을 위하여 제원을 알고 있는 가 구조물에 대한 스캐닝 수행결과 레이저 센서의 오차수준(4mm)이내에서 측정이 가능한 것으로 판단되었다.
또한 개발된 시작품을 이용하여 실제 운용중인 철도 터널과 서울지하철 터널에 대한 스캐닝을 수행하였다. 일차적으로 터널 스캐닝 결과는 터널의 제원에 대한 확인이 가능하였으며 각 시설물의 위치 및 시설물에 대한 제원의 파악이 가능하였다. 스캐닝 결과의 분석을 통하여 예측한대로 하나의 터널 프로파일을 형성하기 위해서는 나선형의 측정이 이루어지며 터널의 크기에 따라 하나의 프로파일이 생성되는데 요구되는 나선의 간격은 상이함을 알 수 있었다. 결론적으로 비록 짧은 구간에 대한 스캐닝이 수행되었지만 실제 터널에 대하여 크기 및 모양에 레이저 센서가 허용하는 범위 내에서는 제한 없이 사용이 가능함을 알 수 있었다
이상의 결과를 바탕으로 향후에는 고성능 레이저 센서의 사용을 통한 대용량 데이터의 획득, 데이터 처리를 위한 전용 프로그램 개발, 터널내 손상부 및 시설물의 자동인식, 측정 시 터널 내 진행방향에 대한 위치정보 취득등과 같은 추가 연구를 통하여 보다 세밀한 라이닝 상태의 표현 및 시설물의 스캐닝이 가능한 시스템의 개발이 수행되어야 할 것이다.
