

1. 서 론
2. UWB 측위 방식 선정
3. 위치추적 센서 설계 및 시작품 개발
3.1 시스템 구성 개요
3.2 하드웨어 설계
3.3 소프트웨어 설계
4. 유사 터널 환경에서의 성능 평가 실험
4.1 실험 환경 및 절차
4.2 실험 결과 및 분석
5. 결 론
1. 서 론
터널 시공 현장은 밀폐된 공간, 제한된 가시성, 복잡한 구조 등으로 인해 안전사고 위험이 높다(Kim et al., 2011). 특히 TBM (tunnel boring machine) 공사 과정에서는 작업자가 대형 장비, 운반 차량 등과 근접하여 작업해야 하며, 붕괴, 화재, 가스 누출 등의 예기치 못한 비상 상황이 발생할 경우 작업자의 위치를 신속하고 정확하게 파악하는 것이 필수적이다. 그러나 일반적으로 활용되는 위성 항법 시스템(global navigation satellite system, GNSS)은 터널 내부에 전파가 도달하기가 거의 불가능하며, 전파가 도달하는 경우에도 전파 간섭, 다중경로 간섭(multi-path interference) 등의 문제가 발생하여, 기존 위성 기반 측위 기술만으로는 위치추적 정확도가 크게 저하되는 한계가 있다(Jiang et al., 2025).
따라서 건설 현장, 광산, 다층 건물 등과 같은 복잡한 실내·지하 환경에서 위치추적 정확도를 향상시키기 위한 연구가 진행되고 있다. Huang et al. (2020)은 다층 건물에서의 층 위치 추정을 위해 Wi-Fi와 기압계 기반 방법을 융합하고, HMM (hidden markov model) 및 XGBoost 기반 동작 인식을 결합한 새로운 기법을 제안하였다. Li et al. (2020)은 건설 현장에서 효율적인 실내 위치추적을 위해 Wi-Fi, BLE (bluetooth low energy) 등 여러 측위 기술을 대상으로 정확도, 비용, 설치 용이성, 전력 소모와 같은 성능 지표를 평가하였다. Zare et al. (2021)은 GNSS 활용이 불가능한 지하 광산에서 무선 실내 측위 기술과 알고리즘을 검토하고, 에너지 효율성, 정확도, 작동 범위 등 여러 측면에서 성능을 분석하였다.
이 가운데 초광대역(ultra-wideband, UWB) 기술은 수십 센티미터 수준의 정밀도를 제공하며, 짧은 펄스폭을 이용해 다중경로 간섭의 영향을 줄일 수 있어 터널 환경에 적합하다. 기존의 UWB 측위 방식에는 TWR (two-way ranging), TDoA (time difference of arrival) 등이 포함된다(Alarifi et al., 2016). 그러나, 각 측위 방식에는 설치 복잡성, 앵커 간 동기화 요구, 각도 측정 오차 등의 한계를 지닌다. 따라서 본 연구에서는 TBM 터널 환경에서 운용 가능한 UWB 기반 측위 기술을 선정하고, 이를 지원하는 위치추적 시스템과 센서 시작품을 설계·제작하였다. 또한, 유사 터널 환경에서 측위 정확도 실험을 통해 제안된 시스템의 정확성과 적용 가능성을 검증하였다.
2. UWB 측위 방식 선정
본 연구에서 제안하는 터널 시공환경에서의 위치추적 기술인 UWB는 500 MHz 이상의 절대 대역폭을 사용하거나, 중심 주파수 대비 20% 이상의 상대 대역폭을 가지는 무선 통신 방식으로 정의된다(Sharma et al., 2021). UWB는 1–4 ns의 짧은 펄스를 전송함으로써 고해상도의 거리 측정이 가능하며, 짧은 펄스 특성으로 인해 다중경로 환경에서도 상대적으로 강건한 특성을 가진다.
UWB 측위 방식은 신호의 도달 시간(time of flight), 신호의 시간차(time difference) 또는 수신각도(angle), 위상차(phase difference)를 활용하는 방식에 따라 크게 TWR (two-way ranging), TDoA (time difference of arrival), AoA (angle of arrival), PDoA (phase difference of arrival)로 구분할 수 있다. 이들은 신호 처리 방식, 설치 환경, 정확도 및 실시간성 등에서 서로 상이한 특성을 보이며, 터널과 같이 공간 제약이 크고 주파수 간섭이 빈번한 환경에서는 측위 방식 선택이 시스템 성능을 좌우한다.
Table 1은 대표적인 UWB 측위 방식 간의 비교를 정리한 것이다. 터널 환경을 고려할 때 PDoA 방식은 다중 안테나 간 위상차 정보를 활용하여 방향까지 측정할 수 있어, 거리 기반 방식에 비해 추가적인 위치 정밀도를 확보할 수 있다. 또한, 설치 복잡도가 상대적으로 낮고, 제한된 환경에서도 적용 가능성이 높아 기술적 이점을 가진다.
Table 1.
Summary of UWB positioning methods in tunnel environments
PDoA는 초광대역 신호의 위상 정보를 활용하여 수신된 신호의 시간 정보와 위상 차이를 계산하고, 이를 통해 정확한 위치와 방향을 동시에 추정할 수 있는 측위 방식이다. 일반적인 거리 기반 측위 방식과 달리, PDoA는 신호가 다수의 안테나에 도달할 때 발생하는 위상 차이를 이용해 이동체의 상대적 방향 정보를 정밀하게 산출할 수 있다. PDoA의 기본 작동 원리는 Fig. 1에 제시하였다. 태그에서 전송된 신호가 앵커노드의 두 개 이상의 안테나에 도달하면, 신호의 위상에 미세한 차이가 발생한다. 이 위상 차이는 신호의 입사각에 따라 달라지며, 식 (1)과 같이 계산할 수 있다.
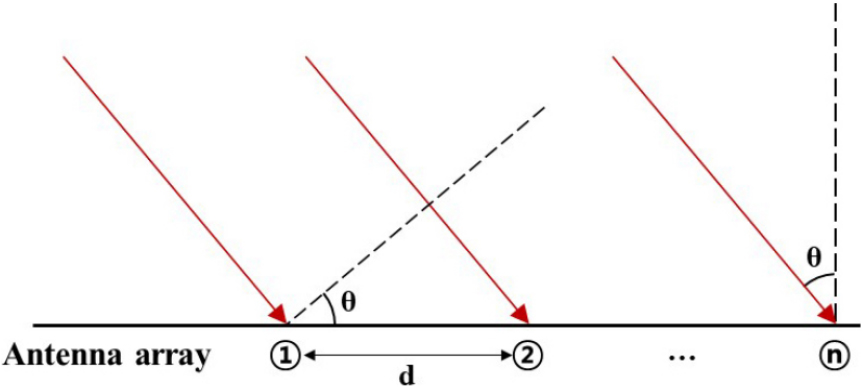
여기서, 𝜃는 입사각, 𝛥𝜙는 수신된 위상차, 는 안테나 간 거리, 𝜆는 신호의 파장을 의미한다. 도출된 입사각은 하나 이상의 앵커로부터 수집된 거리 또는 방향 정보와 결합되어, 삼각측량(triangulation)에 기반한 2D 또는 3D 위치 추정에 활용될 수 있다.
PDoA 방식은 정밀도, 환경 적용성, 설치 효율성 측면에서 터널과 같은 제한된 공간 구조에 특히 효과적이다. 위상차 기반의 신호 해석은 센티미터 수준의 높은 위치 정밀도를 제공하며, UWB 신호의 짧은 펄스 특성과 결합될 경우 다중경로 간섭 환경에서도 신뢰도 높은 측위를 가능하게 한다. 또한, TWR 기반 PDoA는 앵커 간 시간 동기화를 필요로 하지 않으므로 복잡한 유선 인프라나 고가의 동기화 장비 없이도 시스템을 구성할 수 있다. 특히, 하나의 앵커만으로도 각도와 거리를 동시에 추정할 수 있어 최소한의 장비로 효율적인 공간 커버리지가 가능하고, 이는 장거리의 선형적 구조를 가지는 TBM 터널 환경에서 특히 유리하게 작용한다. 따라서 본 연구에서는 PDoA 방식을 채택해 위치추적 센서 시작품을 개발하였다.
3. 위치추적 센서 설계 및 시작품 개발
본 연구에서는 TBM 터널 환경에 최적화된 PDoA 기반 위치추적 시스템을 구현하기 위해, UWB 신호 수신 및 위상차 계산이 가능한 앵커노드(anchor node)와 태그(tag) 장치를 포함한 시작품을 설계하였다. 특히, 철재 구조물로 인한 반사 및 다중경로 간섭이 빈번히 발생하는 지하 전파 환경을 고려하여, 정밀한 측위 성능과 안정적인 통신 품질을 동시에 확보할 수 있도록 하드웨어와 소프트웨어를 구성하였다.
3.1 시스템 구성 개요
PDoA 기반 UWB 위치추적 시스템은 터널 환경에서 정밀 측위를 구현하기 위해 태그, 앵커노드, 통신 네트워크, 실시간 관제 프로그램으로 구성된다. 태그는 작업자 또는 건설 기계 등에 부착되어 위치 정보를 주기적으로 송신하며, 앵커노드는 이를 수신하여 위상차를 계산하고 신호의 도착각을 추정한다. 각 앵커는 독립적으로 위치 계산이 가능하며, 시간 동기화를 요구하지 않는다. 추정된 위치 정보는 무선 또는 유선 통신망을 통해 관제 서버로 전송되며, 실시간 관제 프로그램에서 시각적으로 실시간 추적이 가능하도록 구현된다. 본 시스템은 위치 정밀도 뿐만 아니라 설치 효율성과 유지보수 용이성을 고려하여, 터널 내부에서도 최소한의 인프라만으로 안정적이고 신뢰도 높은 측위가 가능하도록 설계되었다.
3.2 하드웨어 설계
하드웨어는 PDoA 기능을 지원하는 앵커노드와 UWB 송신용 태그로 구성된다. 앵커노드는 Fig. 2와 같은 회로로 설계되었다. 태그에서 송신된 UWB 신호는 두 개의 수신 안테나(ANT1, ANT2)에 동시 수신되며, 이때 발생하는 미세한 위상차를 분석하여 도착각 정보를 추정한다. 두 안테나는 각각 RF1, RF2 수신 경로로 연결되어 저잡음 증폭기(low-noise amplifier, LNA)를 거쳐 증폭되고, 혼합기(mixer)와 이득 증폭기(gain amplifier)를 통과한 후 ADC (analog-to-digital converter)를 통해 디지털 데이터로 변환된다. 변환된 디지털 데이터에는 신호의 진폭과 위상 정보를 포함하는 I/Q (In-phase and Quadrature) 값이 담겨 있다.
이후 ANT1과 ANT2로부터 획득된 디지털 데이터 스트림은 디지털 수신부에서 처리된다. 디지털 수신부는 두 안테나의 I/Q 데이터를 비교하여 위상차를 계산하며, 동시에 Carrier/Timing Recovery 회로를 통해 신호의 최초 도달 경로(first path)를 검출하고 정밀한 도달 시간(time of arrival, ToA)을 타임스탬프로 기록한다. 이 타임스탬프 정보는 이후 태그와의 양방향 통신을 통해 거리 계산에 활용된다.
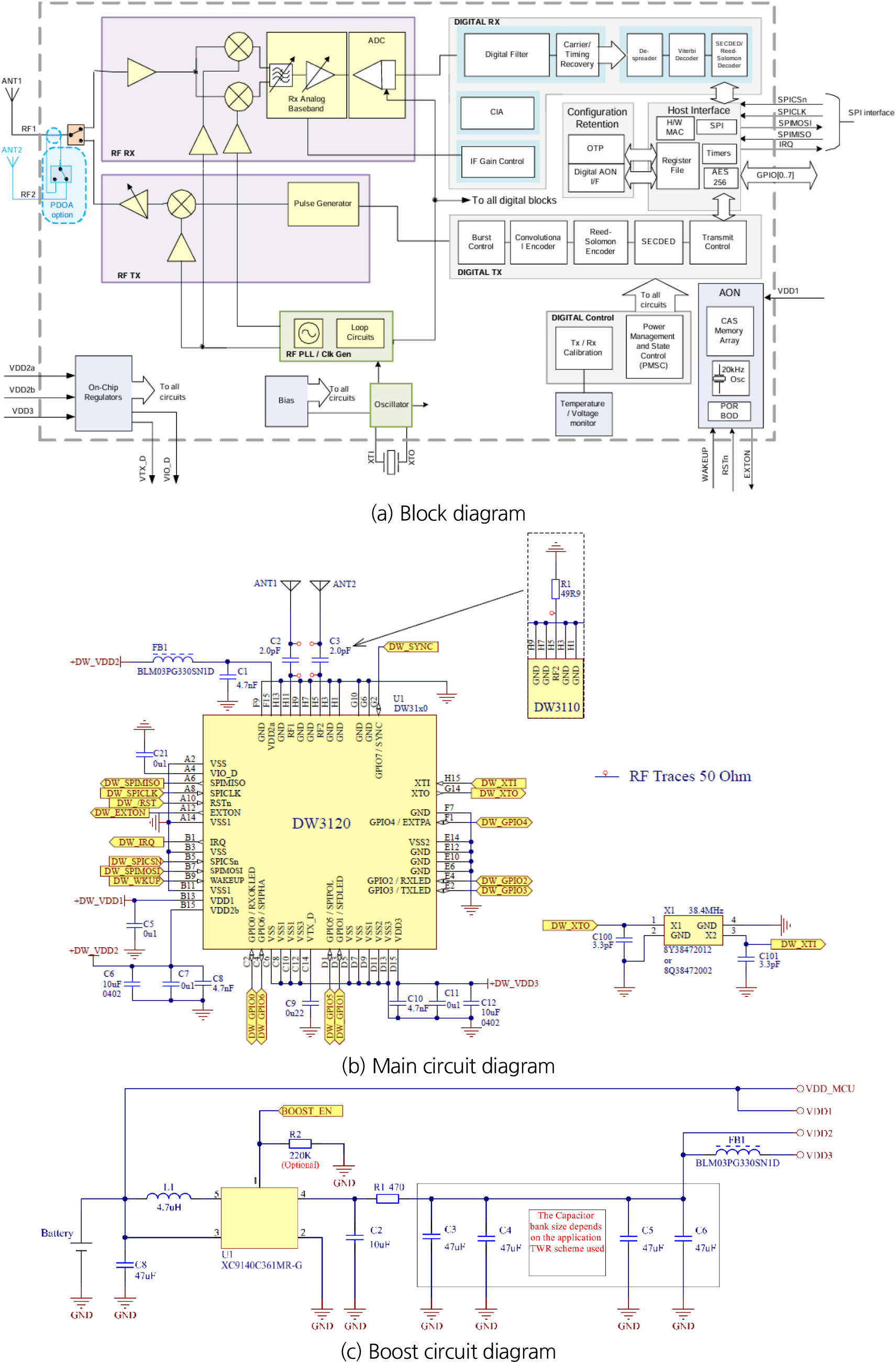
계산된 핵심 정보(위상차 값, ToA 타임스탬프)는 SPI (serial peripheral interface) 기반의 호스트 인터페이스를 통해 주 제어 장치인 MCU (microcontroller unit)로 전달되며, MCU는 이를 이용해 위치 추정 및 시스템 제어를 수행한다. 특히, 앵커로부터 수신된 위상차 값은 식 (1)과 같은 삼각함수 관계를 통해 도착각을 최종적으로 계산한다. 또한 타임스탬프를 이용해 왕복 통신 시간을 계산하고, 이를 빛의 속도와 곱하여 태그와의 물리적 거리를 산출한다.
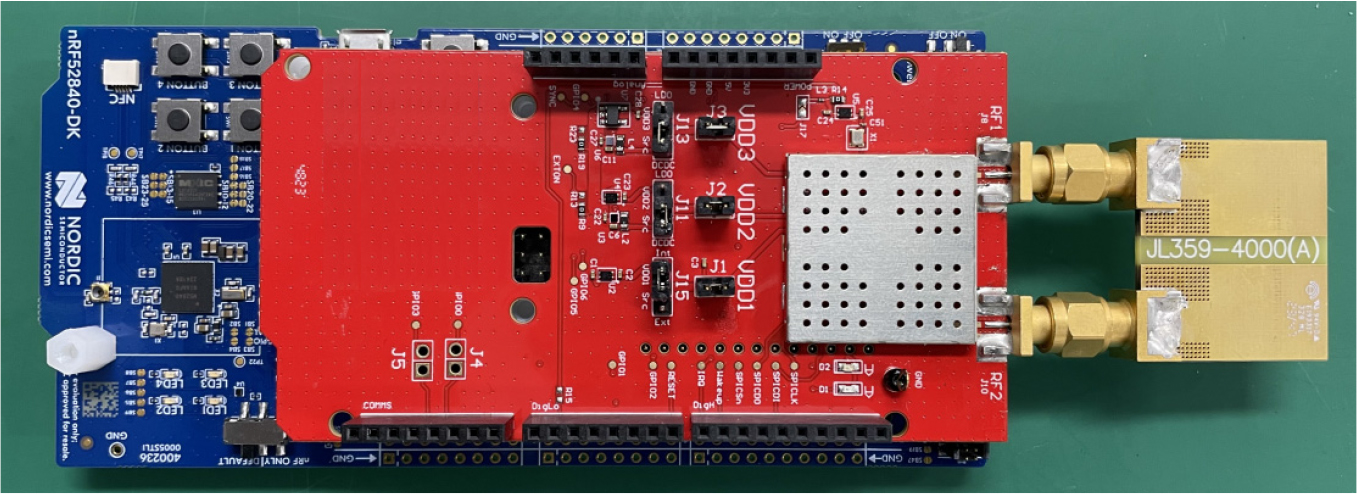
추가적으로, 앵커노드에는 온도 센서, 트림 보정 회로, 온칩 전원 회로 등이 집적되어 있어 터널 내부의 열악한 환경에서도 안정적인 동작이 가능하다. 제작된 앵커노드 시작품은 Fig. 3에 제시하였다.
태그는 저전력 동작과 실시간 송신의 안정성을 고려하여 Fig. 4와 같이 설계되었다. 태그 회로는 크게 UWB 통신 모듈, MCU, 전원 관리 회로, 프로그래밍 및 사용자 인터페이스로 구성된다.
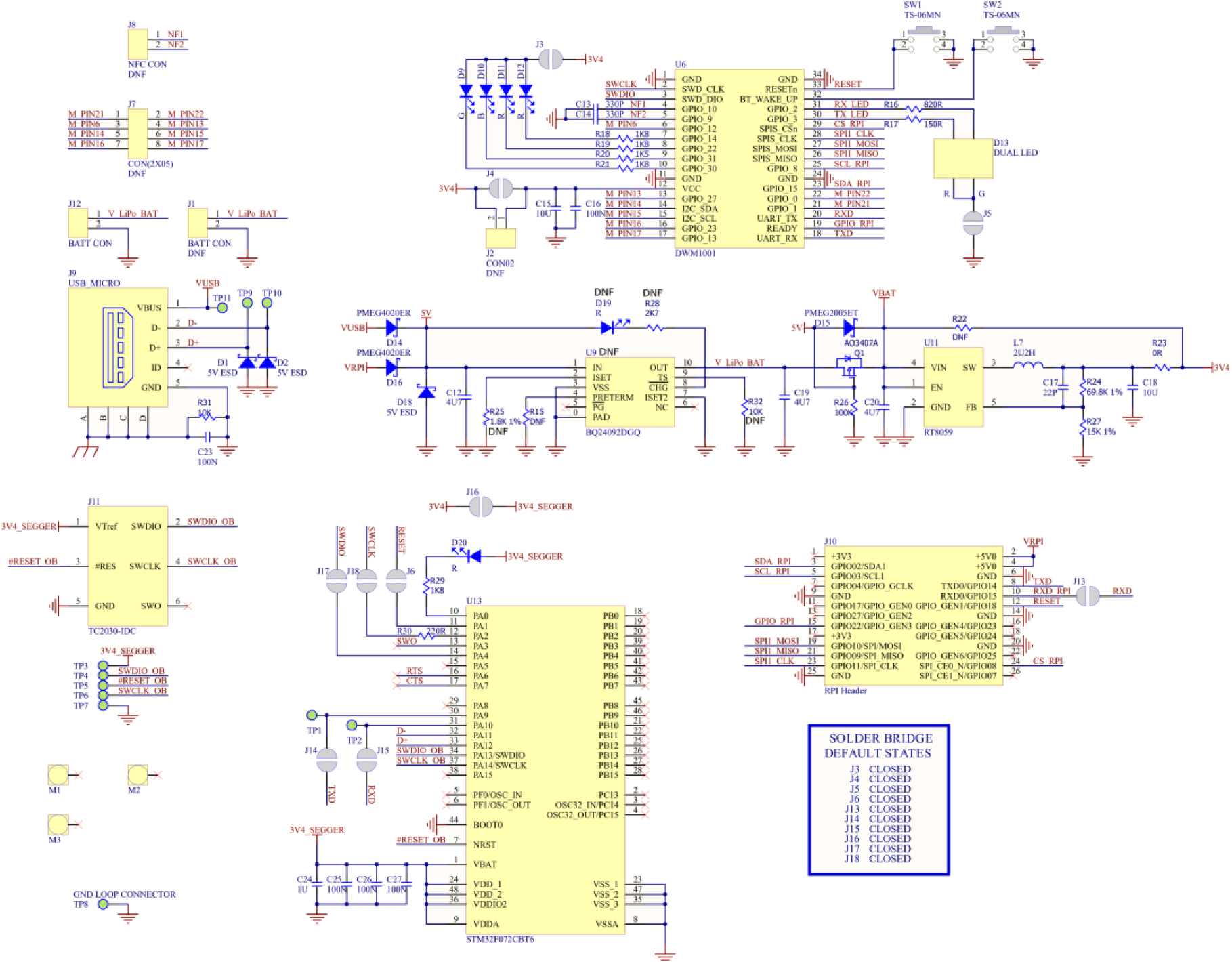
UWB 통신 모듈은 태그의 핵심 기능을 담당하는 통합 모듈로서 UWB 신호 송수신을 위한 트랜시버(transceiver)를 포함한다. 이 모듈에는 BLE 기능이 내장된 마이크로 컨트롤러와 3축 가속도계가 함께 집적되어 있어, 태그가 일정 시간 움직이지 않을 경우 자동으로 수면모드로 전환된다. 이를 통해 불필요한 송수신을 차단함으로써 배터리 소모를 효과적으로 줄일 수 있다.
MCU는 태그의 전체 동작을 관리하고, 사용자와의 인터페이스를 담당한다. 커넥터를 통해 입력되는 USB 신호를 처리하여 PC와 가상의 시리얼 포트를 열고, 이를 통해 위치 데이터 및 상태 정보를 실시간으로 모니터링할 수 있다. 또한, 온보드 J-Link 디버거 기능을 지원하여 별도의 외부 장비 없이도 MCU 펌웨어의 프로그래밍과 디버깅이 가능하다.
전원 관리 회로는 태그의 안정적인 동작과 배터리 효율성을 보장하는 핵심 구성 요소이다. 태그 전원은 5 V USB 입력 또는 리튬 폴리머(Li-Po) 배터리 입력을 통해 공급된다. 배터리 충전은 전용 충전 IC에 의해 제어되며, 시스템 전원은 스텝다운 컨버터가 5 V (USB) 또는 약 3.7 V (배터리) 입력을 안정적인 3.4 V로 변환하여 제공한다.
프로그래밍 및 사용자 인터페이스는 태그 개발 및 상태 확인을 지원한다. 디버깅 커넥터는 J-Link 디버거를 연결하여 MCU의 펌웨어를 직접 프로그래밍할 수 있는 SWD (serial wire debug) 포트를 제공한다. 사용자 버튼과 듀얼 LED (light emitting diode)는 특정 기능을 트리거하거나 동작 상태를 시각적으로 표시한다. RPI Header는 라즈베리파이와 호환되는 GPIO (general purpose input/output) 확장 헤더로, 추가 센서 및 액추에이터 연결을 통해 기능 확장이 가능하다. 제작된 태그 시작품은 Fig. 5와 같다.

3.3 소프트웨어 설계
관제 소프트웨어는 UWB 측위 시스템의 성능을 GUI (graphical user interface)을 통해 시각적으로 확인하고, 제한 구역(Geo-fence) 내 진입 여부를 판단할 수 있도록 개발되었다(Fig. 6). 사용자 인터페이스는 실제 터널 형상을 반영한 축척 기반 2D 평면도로 구현되었으며, 작업자 또는 태그의 위치 정보를 실시간으로 표시한다. 특히, TBM 공사 현장의 협소한 폭과 장축 방향의 특성을 고려하여 세로 방향 확대 기능을 포함하였고, 사용자가 직접 Geo-Fence 영역을 설정하거나 해제할 수 있도록 직관적 입력 인터페이스를 제공한다. Geo-Fence 구역 진입 시 화면 테두리의 점멸 표시와 음향 경보가 발생하며, 작업자가 해당 구역을 벗어나면 자동으로 해제된다. 본 시스템은 모듈화된 구조로 설계되어, 향후 현장 적용 시 다양한 제한 구역 설정과 사용자 정의 경보 조건 확장이 가능하도록 개발되었다.

4. 유사 터널 환경에서의 성능 평가 실험
본 장에서는 개발된 PDoA 기반 UWB 위치추적 센서의 성능을 검증하기 위해 수행한 유사 터널 환경 실험의 절차와 결과를 제시한다. 실험은 실제 TBM 터널과 유사한 구조적 제약(협소한 단면, 장축 구조 등)과 전파 조건(강한 다중경로 간섭 등)을 반영한 시험 환경을 구축하여 진행되었다. 이를 통해 시스템의 측위 정밀도, Geo-Fence 알람 발생의 정확성 등을 종합적으로 평가하고, 제안된 기술의 현장 적용 가능성을 검증하였다.
4.1 실험 환경 및 절차
실험은 폭 2,800 mm, 높이 2,750 mm의 지하 보행로에서 벽체 및 천장을 활용하여 터널 단면과 유사한 구조를 모사한 환경에서 수행되었다(Fig. 7). 앵커노드는 총 3대를 일정 간격으로 선형 배치하였으며, 각 노드에는 수평 및 수직 방향으로 2개의 UWB 안테나를 장착하여 위상차 기반 도착각 계산이 가능하도록 구성하였다. 태그는 피험자가 착용한 상태에서 주기적으로 이동하며, 이동 경로는 사전 정의된 트랙을 따라 반복적으로 진행되었다.
본 실험은 태그의 측위 정확도와 Geo-Fence 알람 시스템의 정밀도를 종합적으로 평가하기 위해 수행되었다. 먼저, 측위 정확도 평가는 UWB 기반으로 산출된 태그 위치를 레이저 거리계로 측정한 실제 거리 정보와 비교하여 평균 오차 및 표준편차를 계산하였다. 동일 조건에서 총 15회의 반복 실험을 수행하여 통계적 신뢰성을 확보하였다.

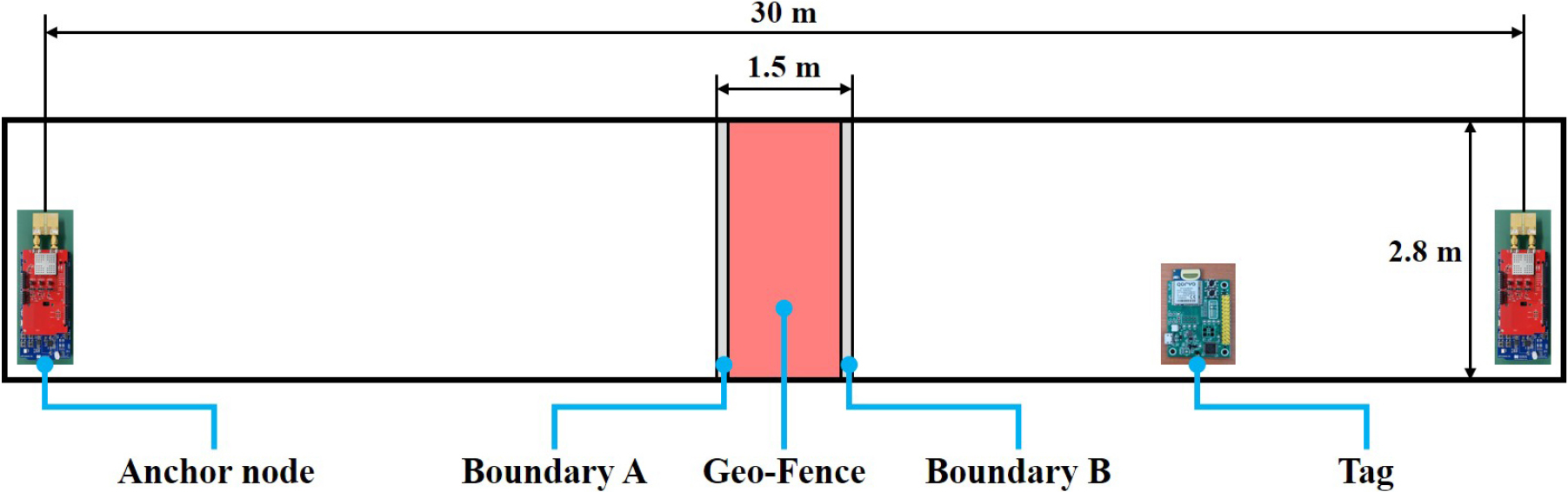
Geo-Fence 알람 시스템의 정밀도 평가는 실험 공간 내에 사각형 형태의 가상 제한 구역을 설정하고, 태그 착용자가 좌우 경계선을 따라 접근하거나 이탈하는 시나리오를 구성하여 수행하였다(Fig. 8). 제한 구역 진입 시, 시스템에서 경고가 발생할 때의 태그 지점과 실제 경계선 간의 거리를 진입오차(entry error)로 정의하고 측정하였다. 반대로, 구역 이탈 시 경고 해제가 발생할 때의 태그 지점과 경계선 간의 거리를 해제오차(exit error)로 정의하고 측정하였다.
본 연구에서는 밀폐된 TBM 공사 현장에서의 작업자 안전 확보를 고려하여, 태그 측위 정확도의 목표는 100 mm 이내, Geo-Fence 알람 시스템의 정밀도 목표는 300 mm 이내로 설정하였다.
4.2 실험 결과 및 분석
태그의 측위 정확도 평가 결과는 Table 2에 제시하였다. 레이저 거리계로 측정한 태그와 두 앵커노드간 실제 거리가 각각 4,938 mm, 6,416 mm일 때, 앵커노드 1과 태그 간 평균 오차는 94.7 mm, 앵커노드 2와 태그 간 평균 오차는 -18.3 mm를 보였다. 두 앵커노드 모두 평균 오차가 100 mm 이내로 나타나, 본 연구에서 설정한 측위 정확도 목표를 충족하였다. 또한 표준편차는 각각 22.1 mm, 37.8 mm로 안정적인 위치 추적 성능을 보였다.
Table 2.
Accuracy test results for tag distance measurements
Geo-Fence 기능 검증 결과는 Table 3에 정리하였다. 경계 A에서 평균 진입 및 해제 오차는 각각 292 mm와 111 mm, 경계 B에서는 각각 389 mm와 243 mm로 나타났다. 전체 평균 오차는 258.7 mm로, Geo-Fence 기능의 정밀도 목표치인 300 mm를 만족하였다. 표준편차는 경계 A에서 19.9–21.7 mm, 경계 B에서 32.4–33.3 mm 범위로 관찰되었으며, 반복 측정 간 일관성이 확보되었음을 확인하였다. 이러한 결과는 터널과 같이 제한된 공간 구조에서 작업자의 위험 구역 진입 여부를 신뢰성 있게 판단할 수 있음을 보여준다.
Table 3.
Accuracy test results of the Geo-Fence alarm system
5. 결 론
본 연구에서는 TBM 터널 시공 환경에서 발생하는 작업자의 위치추적 문제를 해결하기 위해 UWB 기반 측위 기술을 분석하고, 터널 환경에 최적화된 TWR 기반 PDoA 방식을 채택하였다. 이를 기반으로 앵커노드와 태그 시작품을 설계·제작하고, 작업자 안전 확보를 지원하기 위한 GUI 및 Geo-Fence 알람 시스템 등을 개발하였다. 개발된 위치추적 시스템의 정확도 및 적용성을 검증하기 위해 실제 TBM과 유사한 환경에서 성능 평가 실험을 수행하였다. 주요 연구 결과는 다음과 같다.
1. PDoA 방식은 위상차를 이용해 거리와 방향을 동시에 측정할 수 있어, 가시선 제한 및 다중경로 간섭이 빈번한 터널 환경에서도 높은 측위 정밀도를 제공함을 확인하였다. 기존 측위 기술과 비교하여 멀티패스 간섭에 대한 강인성, 시스템 구축 용이성, 측정 정확도 측면에서 우수한 적합성을 보였다.
2. PDoA 지원 앵커노드와 태그를 시작품으로 제작되었다. 앵커노드는 다중 안테나 기반 위상차 측정 회로와 UWB 통신 모듈을 포함하며, 태그는 소형·저전력 설계를 통해 작업자 착용 및 장비 부착이 용이하도록 구현되었다. GUI는 Geo-Fence 영역 설정과 경고 기능을 지원하며, 가시적 경고 표시 및 시각적 확대 기능을 제공함으로써 현장 적용성을 강화하였다.
3. 유사 터널 환경에서 실시한 성능 평가에서, 측위 정확도 시험 결과 두 앵커노드와 태그 간 평균 오차 모두 100 mm 이내로 나타나 목표 기준을 충족하였다. 또한 Geo-Fence 알람 시스템의 평균 오차는 258.7 mm로, 목표 기준인 300 mm를 만족하였다. 본 시스템은 다중경로 간섭 등 열악한 전파 조건에서도 안정적인 위치추적 성능과 신뢰성을 유지할 수 있음을 입증하였다.
4. 본 연구는 실제 TBM 공사 현장이 아닌 유사 환경에서 단기 실험 위주로 진행되었다는 한계점이 있다. TBM 시공 환경은 전자기 간섭, 지속적인 진동 및 분진 등의 극한 작업 특성을 가지므로, 향후 연구에서는 이를 고려하여 하드웨어 내구성 평가, 장기간 운용 시 성능 안정성 검증, 동적 작업 환경에서의 측위 정밀도 검토 등이 수행되어야 한다. 추가적으로 GUI 내 작업자 위치 및 위험 구역을 직관적으로 개선하고, AI 기반 안전관리 시스템과 연계하여 측위 데이터를 실시간 분석함으로써 종합적인 안전관리 체계로 확장할 수 있을 것이다.
