

1. 서 론
2. 저심도 철도 특성
3. 저심도 굴착공법
3.1 오픈쉴드 공법
3.2 TOMAS 공법
4. 트렌치 쉴드 장비
4.1 트렌치 쉴드 장비 모형 및 특징
4.2 트렌치 쉴드 시공 메커니즘
5. 트렌치 쉴드 장비의 굴착기 설계
5.1 트렌치 쉴드 장비의 굴착기 토크 설계
5.2 트렌치 쉴드 장비 비트의 절삭 모델 및 설계
5.3 하부 굴착기의 비트의 설계 예시
6. 결 론
1. 서 론
‘2014년 국토교통통계연보(MLTM, 2014)’에서 인구 비율을 살펴보면 1960년 도시인구 비율은 39.14%에 불과하였지만 2013년에는 91.58%로 대한민국 인구 10명 중 9명이 도시에서 사는 것을 알 수 있다. 좁은 도시에 밀집된 인구로 인하여 도시에 거주하는 사람들은 교통 혼잡 및 이동에 불편을 겪고 있다. 이러한 불편함을 최소화 하기위하여 저비용의 저심도 철도 시스템 개념이 도출되었다. 저심도 철도 시스템은 지면으로 부터 5∼7 m 아래 설치되는 열차 시스템으로서 도로 아래 부분을 따라 운행하며 일반 지하철보다 작은 경량 철도시스템이다. 따라서 지면에 위치한 버스 정류장과의 거리가 짧아 환승이 용이하며 일반 지하철의 경우보다 크기가 작고 시스템 엔지니어링 상으로 최적화 되어 있기 때문에 개략 건설비가 50%이상 절감할 수 있다(지하철(9호선 기준)건설비 1,000억/km, 저심도 철도 건설비 400억/km). 또한 필요시 운전시격의 축소를 통해 수송용량을 늘일 수 있다. 이러한 저심도 철도를 건설하기 위한 시공 방법으로 개착공법을 이용하며 일반적으로 개착공법은 가시설을 설치하여 시공하는 것이 대부분이다. 그러나 구조물 시공에 있어 가시설의 설치비용이 많이 들며 시공기간이 장기간 소요되기 때문에 새로운 공법의 개발이 요구되고 있는 실정이다. 따라서 이러한 단점을 보완 할 수 있도록 개발한 장비가 트렌치 쉴드이다. 트렌치 쉴드 장비는 가시설을 대신해 줄 뿐만 아니라 굴착기가 장비에 부착되어 있기 때문에 흙이 굴착하는 시간을 단축할 수 있다. 또한 TBM (Tunnel Boring Machine)공법과 유사하게 흙을 굴착한 이후 바로 세그먼트를 설치하는 방식이기 때문에 시공 시간을 크게 줄 일 수 있는 장점이 있다. 본 논문은 이러한 장점을 지닌 트렌치 쉴드 장비의 모형과 특징, 시공방법에 대하여 서술하였고 절삭 비트의 설계에 대한 연구 내용을 제시하였다.
2. 저심도 철도 특성
저심도 철도란 도로면으로부터 5∼7 m 떨어진 곳에 위치한 철도로서 시스템 엔지니어링을 통하여 최적화된 철도 시스템과 저렴한 공사비로 주로 도심지에서 유용하게 사용될 수 있는 교통수단이다. 국내에는 저심도 철도시스템의 개념으로 시공된 사례는 없으나 일본과 싱가포르, 미국, 독일, 프랑스 등에서 저심도 철도 시스템과 유사한 방식의 철도가 운행 중이다. 저심도 철도 시스템은 Fig. 1에서 보듯이 근접한 심도에 철도가 위치하여 환승이 용이하기 때문에 사회적 편익이 증가 할 것으로 예상된다. 또한 소량 경량이어서 기존의 지하철에 비해 건설비가 절감되고 소음이 적으며, 급곡선(15 m)에서 운행 가능하며 LIM (Linear Induction Motor)과 톱니바퀴 방식의 적용으로 급경사(최대 100‰)에서도 주행이 가능한 철도 시스템을 구현할 수 있다(Lee et. al., 2012).

3. 저심도 굴착공법
3.1 오픈쉴드 공법
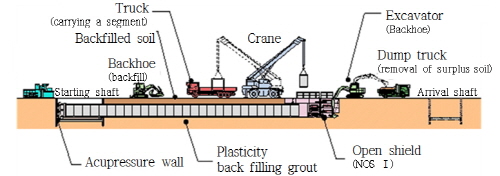
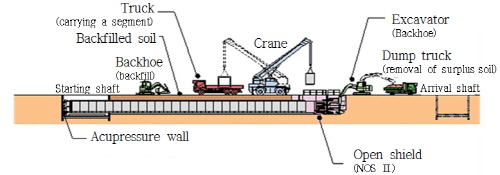
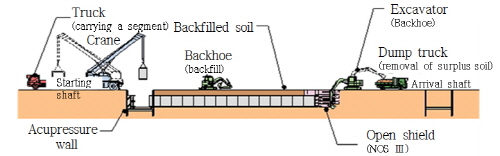
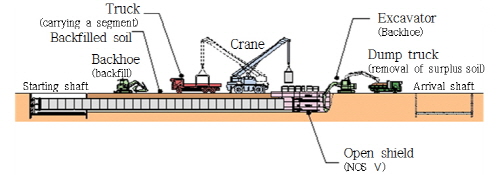
트렌치 쉴드 장비를 이용한 공법과 유사한 장비인 오픈 쉴드는 기존의 개착 공법이나 쉴드 공법을 대신하는 시공방법으로 함체를 지중에 매설하는 공법이다. 주로 시가지・근접 시공・연약 지반・고 지하수 조건 등을 중심으로 안전성과 경제성, 환경을 고려한 공법이다. 오픈 쉴드를 이용한 공법으로는 Fig. 2∼Fig. 5와 같이 뒤채움 주입 타입(NOSⅠ형), 뒤채움 주입 없음 타입(NOSⅡ형), 추진타입(NOS Ⅲ형), 자주타입(NOSⅤ형)이 있다. NOSⅠ형은 모든 지반에 사용이 가능하며 부석함체와 지반과의 공극을 가소성 그라우트에 의한 뒤채움을 실시하고 굴진하는 타입으 로 많이 쓰이고 있는 타입이다. NOSⅡ형은 가장 측면 지반과의 공극을 토사 층으로 되메우기하며 굴진하는 것으로 자립성 지반이나 지하수 영향이 적은 곳에서만 시공이 가능하기 때문에 필요한 경우 보조공법을 이용해야 한다. NOS Ⅲ형은 발진 부 쪽에 함체를 부설하고 원압 설비가 설치되어 이것을 지지대로 하여 추진하기 때문에 짧은 길이의 시설이나 직선 시공을 할 경우에만 사용된다. 마지막으로 NOSⅤ형은 주면마찰력을 반력으로 굴진하는 타입으로 쉴드 장비가 3개의 블록으로 나누어져 있어 하나의 블록이 전진할 때 나머지 블록의 자중과 주면마찰력을 반력으로 추진하는 타입이다. 따라서 자립성 지반이어야 하며 지하수의 영향이 적은 곳에 설치되어야 하기 때문에 특수 경우의 지반에만 사용한다(Open shield Association, 2012).
|
Fig. 2. Backfilling injection type (NOSⅠ) |
|
Fig. 3. No backfilling injection type (NOSⅡ) |
|
Fig. 4. Propulsion type (NOSⅢ) |
|
Fig. 5. Self-reliance type (NOSⅤ) |
3.2 TOMAS 공법
TOMAS 공법은 프리스트레스 콘크리트를 장비 삽인 전 양쪽 끝에 설치하여 가이드로 이용하고 가이드의 구멍에 장비를 고정시킨 후 장비 전면에 대형의 굴착기를 부착하여 흙을 굴착하는데 굴착 장비는 위 아래로 180° 회전이 가능하여 흙을 굴착하는데 용 이하며 원형으로 굴착하기 좋은 형태로 제작되었다. 장비 후면에 TBM 이렉터와 같은 세그먼트 조립 장치가 설치되어 있다. 이 이렉터로 세그먼트를 연결하여 하나의 반원형 세그먼트를 쉽게 설치 할 수 있도록 설계되었다. 또한 양쪽에 바퀴가 달려있어 이동이 용이하며 흙을 굴착한 직후 바로 세그먼트 설치가 가능하다(TOMAS, 2012).
4. 트렌치 쉴드 장비
4.1 트렌치 쉴드 장비 모형 및 특징
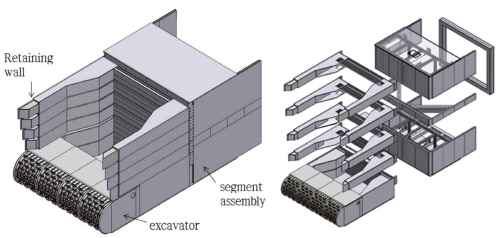
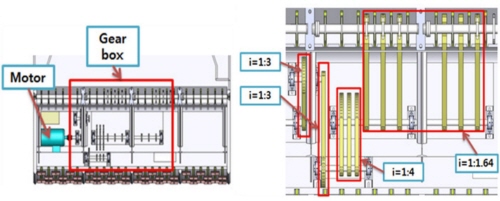
저심도 철도의 굴착심도는 지하 매설물의 심도에 따라 달라지나 광주 2호선을 기준으로 지하매설물의 심도가 도로 하면의 2.5 m수준인 경우 요구되는 바닥면의 굴착심도로 대략 8 m수준이다(Lee at. al., 2012). 이러한 심도는 오픈 쉴드와 같이 도로면에서 백호로 굴착하기에는 한계가 있으므로 하부에 굴착기를 배치하는 형태를 고려하였다. 트렌치 쉴드 장비는 아래의 Fig. 7과 같이 크게 토류판, 굴착기, 세그먼트 조립부로 나눌 수 있다. 토류판은 전면부의 토사를 굴착 했을 경우 측면의 흙이 무너지지 않도록 지지하는 역할을 하며 굴착기의 윗부분에 4개의 모듈이 조립되어 있다. 각 모듈은 상부로 올라갈수록 길이가 길게 설계하였고 앞뒤로 이동 가능하며 끝 부분이 날카롭게 제작되어 유압으로 굴착면 표면에 잘 근입되도록 설계 되었다. 굴착기는 장비의 하단부에 위치해 있으며 지상에 있는 백호가 작업하기 힘든 부분을 장비가 전진하면서 흙을 굴착하도록 설계하였다. 굴착방식은 Chain- Sprocket을 사용하고 체인에 비트를 장착하여 회전하면서 굴착하는 방식이다. 시공 모듈은 세그먼트 모듈을 설치할 공간과 토류가 무너지지 않도록 지지하는 프레임으로 구성되어 있다. 6개가 장착되어 있으며 장비 전체를 이동시키는데 장비 전체가 앞으로 이동할 수 있도록 100t Actuator가 무리가 없도록 설계되었다. Fig. 8은 굴착기의 내부와 기어 박스 안에서 기어비를 4단계로 생성하여 토크를 증폭시키는 구조의 모습이다. 기어비는 큰 기어와 작은 기어의 잇수의 비를 나타내는데 모터에서 발생하는 고속의 회전을 저속을 변경하면서 토크를 증폭시키는 구조이다. 그림내 수치는 각 단계별 증폭 비율을 나타내는데 단계별 기어박스내에서 증폭된 토크는 4단계에 걸쳐 최종 59배의 증폭이 가능한 구조이다. 굴착기 내부에는 모터와 기어 박스로 구성되어 있으며 모터의 동력으로 체인이 회전하며 체인에 부착된 비트가 흙을 굴착하도록 설계되었다.
|
Fig. 7. Component of the trench shield equipment |
|
Fig. 8. Interior of a excavator and torque amplification of a gear box |
4.2 트렌치 쉴드 시공 메커니즘
트렌치 쉴드의 시공순서는 Fig. 9와 같이 여섯 단계로 나눌 수 있다. 장비가 설치될 발진구를 굴착하여 트렌치 쉴드 장비를 설치한 후 매설관의 설치 심도인 1 m∼2 m를 백호로 굴착한다. 트렌치 쉴드 전면에 있는 토류판을 상부에서 부터 차례대로 삽입하여 측벽의 흙을 지지한 후 백호로 토류판 사이에 있는 흙을 굴착한다. 백호로 굴착할 수 없는 부분의 하단은 아래에 설치된 토류판을 삽입한 후 굴착기를 이용하여 회전 롤러커터에 의해 굴착을 한다.
그 후 추진잭에 의해 트렌치 쉴드 장비를 앞으로 추진한다. 장비 후면의 추진한 사이 공간에 세그먼트를 삽입・설치하여 되메우기를 하고 이를 반복 시공한다.
5. 트렌치 쉴드 장비의 굴착기 설계
심도가 깊을수록 백호로 저심도 구조체가 설치되는 바닥까지 굴착하기에는 한계가 있다. 예를 들어 광주 2호선을 기준으로 저심도 철도의 굴착 심도는 약 8 m이므로 백호로 전 구간을 굴착하는 것은 한계가 있다. 백호로 굴착이 어려운 지반은 트렌치 쉴드 하단에 위치한 회전형 굴착기로 흙을 굴착할 수 있도록 하였다. 본 절에서는 흙의 굴착을 위한 개별 커터의 설계과정을 논의하고자 한다. 비트의 설계를 위하여 1) 사면거동 이론에서 절편법을 이용한 토크 산정 2) 비트 간의 절삭 간격을 반영한 개별 비트의 절삭력 산정 3) 예시를 통한 설계의 적용에서 비트의 크기를 선정하였다. 토크의 산정으로 모터의 동력을 선정 할 수 있으며 개별 비트의 절삭력의 값으로 비트의 높이와 폭을 설계하는데 이용 할 수 있다.


5.1 트렌치 쉴드 장비의 굴착기 토크 설계
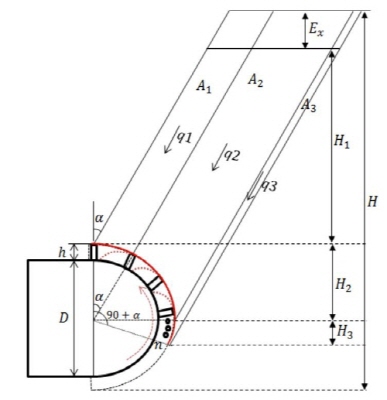
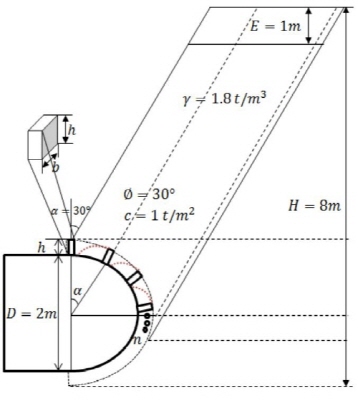
굴착기가 굴착을 하기 위해서는 토압과 전단저항을 견딜 수 있을 만큼의 모터 동력의 산정이 필요하다. 이를 위해 굴착기에 부과되는 토크 설계를 위한 굴착메커니즘을 제시하였다. 사면거동 이론(Korean Geotechnical Society, 1997)을 이용하여 굴착 메커니즘에 따라 이론식을 제안하였으며 Fig. 10은 굴착기에 소요되는 토크 산정 과정을 설명하기 위해 나타낸 개념도이다. 굴착사면 및 지반 내 파괴면은  각도로 파괴경사를 이루며 절삭면은
각도로 파괴경사를 이루며 절삭면은  면으로 굴착 시에 토압은 절삭면 중
면으로 굴착 시에 토압은 절삭면 중  면에 작용하며 토압은 개별 절편의 자중의 합(
면에 작용하며 토압은 개별 절편의 자중의 합( )이며
)이며  는 백호로 미리 굴착될 부분의 높이를 나타낸다. 절삭면
는 백호로 미리 굴착될 부분의 높이를 나타낸다. 절삭면  에 작용되는 토압은 무시하며 점착력이 있는 경우만 고려하고 파괴 사면은
에 작용되는 토압은 무시하며 점착력이 있는 경우만 고려하고 파괴 사면은  에 발생되는 전단 저항은 한계상태로 고려한다. 추진력(P)에 의하여 절삭면의 토압은
에 발생되는 전단 저항은 한계상태로 고려한다. 추진력(P)에 의하여 절삭면의 토압은  면과
면과  면에 추가적으로 작용되는 것으로 한다. 이를 가정하여 굴착기의 직경과 추진력을 선정하기 위한 토크의 크기를 산정하였다. 절삭 거동의 대한 기초의 Parameter에 대한 계산 과정에서 파괴면의 경사(
면에 추가적으로 작용되는 것으로 한다. 이를 가정하여 굴착기의 직경과 추진력을 선정하기 위한 토크의 크기를 산정하였다. 절삭 거동의 대한 기초의 Parameter에 대한 계산 과정에서 파괴면의 경사( )를 이용하여
)를 이용하여  (abch의 넓이),
(abch의 넓이),  (hcdg의 넓이),
(hcdg의 넓이),  (gedf의 넓이)의 넓이를 산정한 식은 다음과 같다.
(gedf의 넓이)의 넓이를 산정한 식은 다음과 같다.

 (1)
(1)
 : 파괴면의 내부 마찰각
: 파괴면의 내부 마찰각
 (
( )
)
 : 굴착기의 중심에서 비트 높이까지의 반경
: 굴착기의 중심에서 비트 높이까지의 반경
 : 굴착기의 지름
: 굴착기의 지름
 : 개별비트의 높이
: 개별비트의 높이

 : 지면에서 굴착기가 설치될 부분까지의 거리
: 지면에서 굴착기가 설치될 부분까지의 거리
 : 매설물 심도로 백호로 미리 굴착될 부분의 높이
: 매설물 심도로 백호로 미리 굴착될 부분의 높이
 (2)
(2)
 (
( )
)

 (3)
(3)
 (
( )
)

 (4)
(4)
각 단면의 토압을 산정하여 파괴면의 전단저항인  (
( ),
),  (
( ),
),  (
( )를 계산한 값은 다음 아래의 식에 제시하였다.
)를 계산한 값은 다음 아래의 식에 제시하였다.
 (5)
(5)



 (6)
(6)
여기서, 
 (7)
(7)
여기서, 
 (8)
(8)
여기서, 
절삭면 에 가해지는 연직토압(
에 가해지는 연직토압( ,
,  ,
,  )과 토압에 의한 절삭부(
)과 토압에 의한 절삭부( ,
,  ,
,  ,
,  )의 전단저항에 대한 계산과
)의 전단저항에 대한 계산과  절단부의 전단저항의 합계에 관한 연산은 다음과 같다(단, 연직토압(
절단부의 전단저항의 합계에 관한 연산은 다음과 같다(단, 연직토압( )의 값이 음수인 경우에는 0으로 한다.).
)의 값이 음수인 경우에는 0으로 한다.).
 (9)
(9)

(10)
 (11)
(11)
 (12)
(12)
여기서, 
 (13)
(13)
여기서, 
 (14)
(14)
여기서, 
 (15)
(15)
여기서, 
 (16)
(16)

굴착장비 추진력( )에 의한 추가되는 절삭면(
)에 의한 추가되는 절삭면( ,
,  )의 전단저항에 대한 값은 다음 식으로 연산할 수 있으며 절삭면(
)의 전단저항에 대한 값은 다음 식으로 연산할 수 있으며 절삭면( )의
)의  는 총 전단저항의 합을 나타낸다.
는 총 전단저항의 합을 나타낸다.
 (17)
(17)
 (18)
(18)
 (19)
(19)
여기서, 
 (20)
(20)
여기서, 
 (21)
(21)

위와 같은 식을 바탕으로 굴착 시 절삭력을 위한 토크( )의 값은 앞서 구한 총 절삭면의 연직토압과 토압에 의한 절삭부의 전단저항의 값(
)의 값은 앞서 구한 총 절삭면의 연직토압과 토압에 의한 절삭부의 전단저항의 값( )과 추진력에 의해 추가되는 절삭면의 전단저항의 값(
)과 추진력에 의해 추가되는 절삭면의 전단저항의 값( )의 합에서 굴착기의 중심에서 개별 비트의 높이까지의 반경(
)의 합에서 굴착기의 중심에서 개별 비트의 높이까지의 반경( )을 곱한 값으로 산정할 수 있다. 산정된 토크의 값으로 흙을 굴착할 수 있는 모터 동력을 설계에 반영 하였다.
)을 곱한 값으로 산정할 수 있다. 산정된 토크의 값으로 흙을 굴착할 수 있는 모터 동력을 설계에 반영 하였다.
 (22)
(22)
굴착기의 지름(D)이 2 m이고 지면으로 굴착기가 설치될 부분까지의 거리(H)가 8 m, 백호로 미리 굴착될 부분의 높이(Ex)가 1 m, 경사각( )이 30°, 추진력(P)이 2 t/m, 개별 비트의 높이(h)가 0.1 m라고 가정하여 연산을 수행하면 토크(T)의 값이 15.97 t・m(장비의 폭을 1 m일 때)이며 결과 값은 모터의 동력 설계를 위해 사용하게 된다.
)이 30°, 추진력(P)이 2 t/m, 개별 비트의 높이(h)가 0.1 m라고 가정하여 연산을 수행하면 토크(T)의 값이 15.97 t・m(장비의 폭을 1 m일 때)이며 결과 값은 모터의 동력 설계를 위해 사용하게 된다.
5.2 트렌치 쉴드 장비 비트의 절삭 모델 및 설계
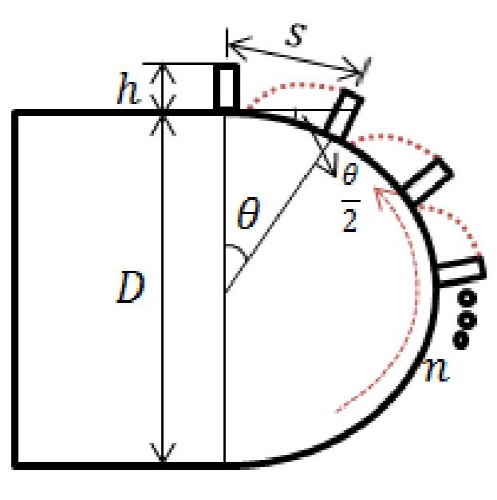
Fig. 11은 체인에 부착한 비트 사이의 간격과 비트의 개수를 산정을 위한 개념도를 나타낸 것이다. 굴착기가 반 시계방향으로 회전 할 때 비트에 따른 흙의 굴착 형태를 빨간색 점선으로 표기하였다. 비트 사이 간격만큼 흙의 굴착이 이루어지며 이때의 간격을 경제적인 간격(s)으로 정의하여 비트의 간격과 개수를 산정하였다. 식 (23)∼(25)을 과정에 따라 연산을 수행하면 비트의 높이( )에 따른 비트 사이의 각도 및 간격을 산정할 수 있으며 최종적으로 절삭을 경제적으로 수행 할 수 있는 체인에 부착되는 비트의 개수(n)를 연산 할 수 있게 된다. 식 (25)의 계산 값이 소수점 이하가 나올 경우 소수 첫 번째 자리에서 올림을 하여 비트의 개수(n)를 구한다.
)에 따른 비트 사이의 각도 및 간격을 산정할 수 있으며 최종적으로 절삭을 경제적으로 수행 할 수 있는 체인에 부착되는 비트의 개수(n)를 연산 할 수 있게 된다. 식 (25)의 계산 값이 소수점 이하가 나올 경우 소수 첫 번째 자리에서 올림을 하여 비트의 개수(n)를 구한다.
 (23)
(23)
 (24)
(24)
 (25)
(25)
 : 비트 사이의 간격
: 비트 사이의 간격
 : 굴착기의 지름
: 굴착기의 지름
 : 비트 사이의 각도
: 비트 사이의 각도
 : 비트의 높이
: 비트의 높이
 : 비트의 개수
: 비트의 개수
예를 들어, 굴착기의 지름(D)의 길이를 1 m라고 가정하였을 때 비트의 높이(h)에 따른 체인 하나 당 비트의 개수는 다음 Table 1과 같다.
트렌치 쉴드 장비에 설치된 굴착기는 흙이 절삭될 수 있도록 구성하였는데 체인에 비트를 부착하여 개
별 비트의 절삭모드에 대한 설계를 위해 Rankine 토압 이론의 수동토압(
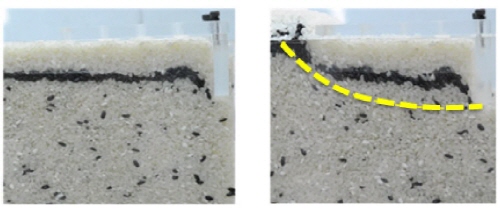
 )을 산정한 식(Lambe and Whitman, 1969)을 사용하여 비트의 절삭모드의 힘을산정하였다. 식의 형태는 식 (26)과 같으며, 적용한 비트의 절삭형태는 Fig. 13로 토압, 점착력, 상재 하중에 대한 값의 합으로 표현 할 수 있다. 또한 비트의 절삭모드가 실제로 어떤 형태로 발생되는지 확인하기 위해 모형실험을 시행(Fig. 12 참조)하였다. 비트 모형과 유사한 투명색의 바(bar)에 힘을 가했을 경우 그 힘의 대응한 실험입자들의 모형 배열을 확인하였는데 실험 결과 주어진 힘에 저항하기 위한 실험 입자들의 절삭 모드 형태가 유선형으로 나타났다.
)을 산정한 식(Lambe and Whitman, 1969)을 사용하여 비트의 절삭모드의 힘을산정하였다. 식의 형태는 식 (26)과 같으며, 적용한 비트의 절삭형태는 Fig. 13로 토압, 점착력, 상재 하중에 대한 값의 합으로 표현 할 수 있다. 또한 비트의 절삭모드가 실제로 어떤 형태로 발생되는지 확인하기 위해 모형실험을 시행(Fig. 12 참조)하였다. 비트 모형과 유사한 투명색의 바(bar)에 힘을 가했을 경우 그 힘의 대응한 실험입자들의 모형 배열을 확인하였는데 실험 결과 주어진 힘에 저항하기 위한 실험 입자들의 절삭 모드 형태가 유선형으로 나타났다.
따라서 말뚝의 저항모드와 비트의 절삭모드가 유사하다고 볼 수 있다고 가정했으며 식 (26)으로 비트의 절삭력을 산정하였다.
|
Fig. 13. Cutting mode of a bit applied passive earth pressure calculation formula of Rankine earth pressure theory |

 (26)
(26)
 : 비트의 절삭력
: 비트의 절삭력
 : 단위중량
: 단위중량
 : 지반에 앵커의 높이 (비트의 높이)
: 지반에 앵커의 높이 (비트의 높이)
 수동토압계수
수동토압계수
 : 점착력
: 점착력
 : 재하하중
: 재하하중
여기서, 
 :
:  가 작용하는 흙의 면적
가 작용하는 흙의 면적
 : 굴착기의 중심에서 비트의 높이까지의 반경
: 굴착기의 중심에서 비트의 높이까지의 반경
 : 파괴면의 경사
: 파괴면의 경사
 는 비트의 높이(
는 비트의 높이( ) 함수로 나타낼 수 있으며 개별 비트의 높이에 따른 비트의 절삭력을 산정할 수 있다. 비트의 높이(
) 함수로 나타낼 수 있으며 개별 비트의 높이에 따른 비트의 절삭력을 산정할 수 있다. 비트의 높이( )를 제외한 다른 변수의 값은 지반의 조건에 따라 선택하여 연산하며 재하 하중(
)를 제외한 다른 변수의 값은 지반의 조건에 따라 선택하여 연산하며 재하 하중( )의 값은 Fig. 14에서 표기된 것과 같이 굴착기에 작용하는 토압을 재하하중으로 보고 연산을 수행하였다.
)의 값은 Fig. 14에서 표기된 것과 같이 굴착기에 작용하는 토압을 재하하중으로 보고 연산을 수행하였다.
q1, q2, q3를 합산하여 토압이 영향을 받는 길이(Fig. 14에서 빨간 선으로 표기함.)를 나눈 값을 식 (26)의 재하하중(q)에 대입하였다.
5.3 하부 굴착기의 비트의 설계 예시
굴착기의 반지름(D)은 2 m로 하였고 백호로 미리 굴착될 부분(Ex)은1 m로 가정하여 연산을 수행하였다. 다음의 조건에서 연산을 수행한 결과를 다음 Table 2에 제시하였다. Table 2을 통해 경제적인 비트의 경험식으로부터 얻은 개별 비트에 요구된 절삭력의 값과 한 체인에 부착되는 비트의 개수(n)를 곱하여 얻은 값을 비트의 폭에 따라 개별 체인 요구 장력을 연산하여 얻은 결과 값을 표에 정리하면 비트의 높이(h)와 폭(b)을 선정하는데 유용하게 사용할 수 있다. 식 (23)∼식 (26)을 사용하여 Fig. 15의 조건에서 비트의 크기 산정을 위한 연산을 시행하였다. 지반은 보통조건(흙의 단위중량( ) = 1.8 t/m3, 점착력(
) = 1.8 t/m3, 점착력( ) = 1 t/m2, 내부마찰각(
) = 1 t/m2, 내부마찰각( ) = 30°)으로 가정하였고 트렌치 쉴드 장비가 설치될 깊이(H)는 지면으로부터 광주 2호선을 기준으로 하여 8 m로 하였다. 높이(h)와 폭(b)을 선정하는데 이용할 수 있으며 비트의 크기에 따른 개별 체인의 설계 장력을 알 수 있다. 개별 체인에 걸리는 토크를 결정하게 되면 토크에 해당하는 비트의 높이와 폭을 선정하여 굴착기의 비트 설계를 할 수 있다. 개별 체인에 걸리는 토크의 설계 하중을 2 ton으로 가정한다면 Table 2에서처럼 빨강색으로 표시된 부분의 안쪽 값 중에서 가장 경제적인 비트의 높이와 폭을 선정한다.
) = 30°)으로 가정하였고 트렌치 쉴드 장비가 설치될 깊이(H)는 지면으로부터 광주 2호선을 기준으로 하여 8 m로 하였다. 높이(h)와 폭(b)을 선정하는데 이용할 수 있으며 비트의 크기에 따른 개별 체인의 설계 장력을 알 수 있다. 개별 체인에 걸리는 토크를 결정하게 되면 토크에 해당하는 비트의 높이와 폭을 선정하여 굴착기의 비트 설계를 할 수 있다. 개별 체인에 걸리는 토크의 설계 하중을 2 ton으로 가정한다면 Table 2에서처럼 빨강색으로 표시된 부분의 안쪽 값 중에서 가장 경제적인 비트의 높이와 폭을 선정한다.
6. 결 론
저심도 철도 시스템을 건설하기 위한 트렌치 쉴드 장비 사용은 일반적인 개착공법에 비해 시공비를 절감하고 시공기간을 줄일 수 있으며 도로 점유 시간이 적어 도심지 시공에 적절하다. 본 논문에서는 이러한 트렌치 쉴드 장비의 특징과 시공방법에 대해 서술하였고, 트렌치 쉴드 장비의 구성요소인 굴착기의 요구 장력 설계와 개별 비트의 요구 절삭력을 산정하고 결과 값을 비교해보았다. 연구 내용에 대한 기술 사항은 다음과 같다.
1.트렌치 쉴드 장비는 크게 토류판, 굴착기, 세그먼트 조립부로 나뉜다. 토류판은 측벽의 흙을 가시설과 같이 지지해 주고 하단의 굴착기는 백호가 굴착할 수 없는 부분의 지반을 굴착할 수 있으며 굴착기 내부의 기어박스에서 토크의 증폭을 4단계를 시행하여 모터의 동력이 커지도록 설계하였다. 세그먼트 조립부에는 Actuator가 설치되어 장비가 전진할 수 있도록 설계되었다.
2.시공 방법은 트렌치 쉴드 장비를 설치한 후 기종부의 흙을 백호로 1∼2 m가량 미리 제거한 후 토류판을 상단부에서부터 차례대로 삽입하여 측벽의 흙을 지지한다. 그 후 지지한 지반을 백호로 굴착하고 백호가 굴착하지 못한 하단 부분은 굴착기가 체인 롤러 비트를 이용하여 흙을 굴착한다. 굴착된 후 트렌치 쉴드 장비가 전진하여 후면에 공간을 만들면 곧 바로 세그먼트를 삽입하여 되메우기를 실시하여 한 사이클이 마무리되고 이를 반복 시공한다.
3.굴착기에 부착되어 있는 비트의 절삭 모드는 Rankine 토압이론의 수동토압(
 )을 산정한 식을 응용하여 비트의 절삭모드의 힘을 산정하였고 모형실험을 통해 절삭 모드를 확인 할 수 있었다. 굴착기의 모터의 동력을 산정하기 위한 토크 산정의 수식을 상세히 기술하였으며 토크에 적합한 굴착기의 추진력을 설계하는데 이용할 수 있었다.
)을 산정한 식을 응용하여 비트의 절삭모드의 힘을 산정하였고 모형실험을 통해 절삭 모드를 확인 할 수 있었다. 굴착기의 모터의 동력을 산정하기 위한 토크 산정의 수식을 상세히 기술하였으며 토크에 적합한 굴착기의 추진력을 설계하는데 이용할 수 있었다.
4.광주 2호선을 기준으로 지반은 Medium한 조건(흙의 단위중량( ) = 1.8 t/m3, 점착력(
) = 1.8 t/m3, 점착력( ) = 1 t/m2, 내부마찰각(
) = 1 t/m2, 내부마찰각( ) = 30°)으로 굴착기 지름(
) = 30°)으로 굴착기 지름( )이 2 m, 트렌치 쉴드 장비가 설치될 깊이(H)는 8 m, 굴착기의 반지름(D)은 2 m, 백호로 미리 굴착될 부분(Ex)가 1 m 일 때로 가정하여 연산을 수행하였고 비트 폭 당 개별 체인 요구 장력을 제시한 Table 2에서 비트의 높이(h)와 폭(b)을 설계할 수 있으며 이에 해당하는 요구 장력을 선정할 수 있었다.
)이 2 m, 트렌치 쉴드 장비가 설치될 깊이(H)는 8 m, 굴착기의 반지름(D)은 2 m, 백호로 미리 굴착될 부분(Ex)가 1 m 일 때로 가정하여 연산을 수행하였고 비트 폭 당 개별 체인 요구 장력을 제시한 Table 2에서 비트의 높이(h)와 폭(b)을 설계할 수 있으며 이에 해당하는 요구 장력을 선정할 수 있었다.
상기의 연구는 트렌치 쉴드의 굴착기의 설계를 위해 수행하였고 토크 장력과 개별 비트의 절삭력을 산정하여 효율적으로 절삭 할 수 있는 비트의 폭과 높이, 비트의 개수를 선정할 수 있다. 이 후에도 배토를 위한 절삭면 형태, 절삭 메커니즘, 비트의 모형(사각형, 삼각형, v형, 사다리꼴, 원뿔형 등)에 따른 굴착의 효율성에 대한 실험을 수행해야 할 것이며 급곡선, 급구배에서도 유연하게 시공 가능한 설계의 연구가 필요하다.
