
1. 서론
2. 미시추구간 암반분류시 문제점
3. 인공신경망 (Artificial Neural Network)
3.1 다층퍼셉트론 (Multi-Layer Perceptron)
3.2 오차역전파 학습알고리즘 (Error Back- Propagation Learning Algorithm)
4. 인공신경망의 학습
4.1 입력자료의 생성
4.2 인공신경망을 적용한 암반분류 모형
4.3 암반분류 예측의 선정
4.4 신뢰성 분석
4.5 실측RMR과 예측RMR의 비교
5. 터널구간 RMR 분포 결과
6.결론 및 고찰
1.서론
대심도 산악터널 설계시에 대부분의 현장기술자들은 설계에 필요한 암반에 대한 정보를 시추를 통해 현장에서 입수하고 있다. 그러나 미시추구간이 존재하는 경우 이에 대한 암반분류는 매우 불확실하며, 실지로 제반의 문제를 극복하고 현장조사에 의하여 해당 미시추구간의 자료를 획득할 수 있다손 치더라도 다양한 방법에 의존한 지반조사 결과는 자료의 신뢰성 (trustworthy)과 일치성 (consistency)에 대한 문제가 항시 존재하여 왔다. 근래에는 턴키나 대안설계의 산악터널 프로젝트에 있어서 양질의 고급화된 물리탐사자료가 쏟아져 나오고 있으나 자료의 이용에 대한 설계자의 인식이 부족하고 특별히 설계적용시에는 충분한 검증과정이 없이 단순히 시추에 의하여 확인된 RMR (Bieniwaski, 1989)이나 Q (Barton, 1974) 값과의 상관계수를 이용하여 미시추 구간에 대한 암반분류를 수행하는 실정이다. 이러한 암반분류는 한정된 지반조사 정보에 의존하기 때문에 미지의 암반터널 굴착구간에 대한 터널설계의 불확실성을 재고할 수 있는 객관적이고 합리적인 방법이라 할 수 없다. 또한, 물리탐사결과로 판독한 지반 데이타는 자료특성상 간접적이고 개략적인 지반의 정보를 나타낼 뿐이며 직접적인 암반분류의 지수 (Index)로 활용한다면 오류를 범할 소지가 다소 존재한다.
본 연구에서는 이러한 터널 미시추구간에서 보다 신뢰성 높은 암반분류 예측을 위해 근래에 지반공학 분야에 범용적으로 활용되고 있는 인공신경망 모형을 적용하였다. 모형화 과정을 위하여 실제 지반의 복잡성을 배제하고 단순화가 요구됨을 인식하고, 이에 대한 현장 적용성 여부를 검토한 후 연장 4㎞의 △△철도터널 설계에 활용하였다. 모형화 과정에서 인공신경망을 적용하기 위하여 전제되어야 할 제반의 가정 (assumption)을 파악하였다. 이러한 전제조건을 충분히 만족한다는 가정하에서 사용한 인공신경망 모형은 기존방법에서 노출된 몇 가지 문제점들을 보완하면서 객관적이고 합리적인 암반분류의 예측이 가능함을 입증하여 주었다. 본 연구에 이용한 인공신경망의 반복학습과정은 Visual Basic 6.0 프로그래밍 언어에 의하여 수행되었다.
2.미시추구간 암반분류시 문제점
설계단계에서 터널 지보패턴 및 지보 선정시 암반분류에 따른 RMR 이나 Q값에 의존하여 구간별 지보패턴을 결정하게 된다. 이러한 암반분류에 의존한 지보패턴 선정의 문제점으로는 ① 일반적으로 터널 계획지역은 일정간격으로 시추, 또는 특별한 조사가 요구되는 지역에 시추 실시한다. ② 시추 및 물리탐사를 병행한 후 이 결과를 가지고 암반 분류 실시하지만 시추조사와 물리탐사결과가 서로 일대일 대비되지 않기 때문에 여타 물리탐사구간에 대한 암반분류가 사실상 곤란하다. ③ 지형 여건상 미시추구간이 발생하며, 미시추구간은 일반적으로 물리탐사로 대처하는데 ②번 사례에 비해 크게 나아질 것이 없으며, 물리탐사는 개략적이고 간략한 탐사방법이지 정량화된 암반분류의 지수(Index)로서의 정확성을 제공하는 것은 아니다. ④ 터널 미시추 구간의 암반분류의 부정확성은 결국 터널 굴착 및 지보 등 공사비뿐만 아니라 현장시공 중 안전사고예방에도 큰 폐해을 준다.
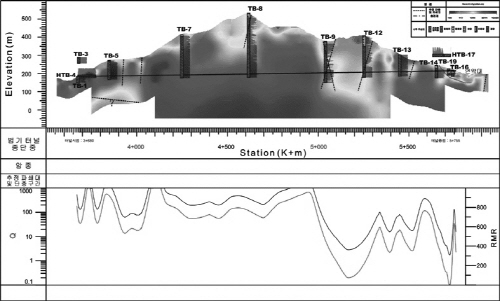
그러므로, 터널구간 암반분류의 정확성이 필히 요구된다. 그림 1의 사례를 보면 시추에서 나온 RMR 값과 전기비저항치의 상관계수가 크게 높게 나타나지 않으며 실지로 자료에서 획득한 물리탐사 결과의 편차가 심하여 실지설계에 필요한 암반분류의 기준수립이 난이하다는 점을 극명히 나타내준다.
3.인공신경망 (Artificial Neural Network)
3.1 다층퍼셉트론 (Multi-Layer Perceptron)
인공신경망 (artificial neural network)은 인간 두뇌의 구조와 동작방식을 모델로 하여 간단한 기능을 하는 단위 처리기 사이를 연결시킨 망 구조로, 뇌의 신경세포를 단순화시켜 수학적으로 모델링한 인공 신경세포들과 그들간의 연결로 이루어져 있다. 인공신경망은 세포들간의 연결가중치 (connection weight)를 조정하는 학습을 통해 얻어진 내적 지식을 이용하여, 새로운 상황에 일반화시켜 이용자가 원하는 자료를 정확하게 출력하며, 학습되지 않았거나 학습된 자료의 일부 파손, 왜곡된 자료의 입력시에도 연결가중치에 저장된 자신의 내적 지식에 따라 적절한 결과를 출력한다.
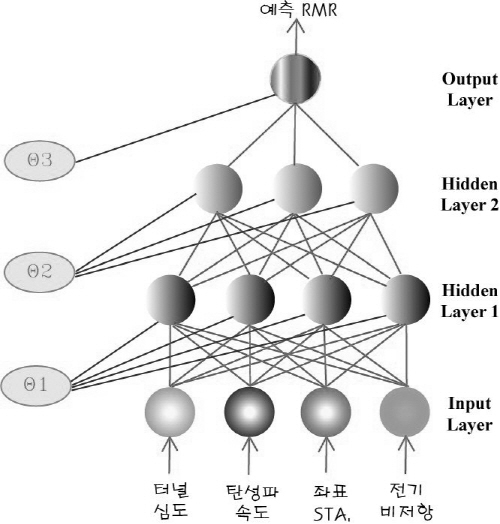
인공신경망을 구성하는 처리소자들은 전달함수를 가지고 있어서 시스템의 비선형 특성을 학습할 수 있고 입력과 출력공간의 사상 (mapping) 특성에 따라 연상기억(associative memory), 필터 (filter), 변환 (transfor-mation), 인식 (perception), 최적화 (optimization) 등의 기능을 수행 할 수 있다. 인공신경망은 입력층과 출력층을 거치면서 입력층에서 입력되는 여러 변수들 중에서 출력에 큰 영향을 미치는 변수를 학습규칙에 의하여 선택한 후 예측 안전율을 추 정 할 수 있다. 여기에서 사용되는 학습규칙은 일반화 델타규칙 (generalized delta rule)이며 최급하강법 (gradient descent method)에 의하여 행되는데, 최급하강법은 다층 퍼셉트론 인공신경망을 학습시켜 모형의 최적 매개변수를 구하는 방법이다. 다층 퍼셉트론은 입력층과 출력층 사이에 하나 이상의 은닉층이 존재하는 인공신경 회로망으로 그림 2와 같은 계층구조를 갖는다. Rosenblatt (1958)의 단층 퍼셉트론의 경우 학습 가능한 층이 하나만 존재하기 때문에 선형 분리 (linear separable) 가능한 문제에만 적용 가능하다는 한계가 있는데, 이러한 한계를 벗어나기 위하여 다층 퍼셉트론을 이용한다. 네트워크는 입력층, 은닉층 및 출력층 방향으로 연결되어 있으며, 각 층내의 연결과 출력층에서 입력충으로의 직접적인 연결은 존재하지 않는 전방향 (feedforward)의 네트 워크이다. 다층 퍼셉트론 (multi-layer perceptron)은 단층 퍼셉트론과 유사한 구조를 가지고 있지만 은닉층과 각 유니트의 입출력 특성을 비선형으로 함으로써 네트워크의 능력을 향상시켜 단층 퍼셉트론의 여러 가지 단점들을 극복했다.

3.2 오차역전파 학습알고리즘 (Error Back- Propagation Learning Algorithm)
오차역전파 학습 알고리즘의 기본 원리는 입력층의 각 유니트 (unit)에 입력패턴을 주면, 이 신호는 각 유니트에서 변환되어 은닉층에 전달되고 최후에 출력층에서 신호를 출력하게 되는 것이다. 이 출력값과 기대값을 비교하여 차이를 줄여나가는 방향으로 연결강도를 조절하고, 상위층에서 역전파되어 하위층에서는 이를 근거로 다시 자기층의 연결강도를 조정해나간다.
그림 3은 오차 역전파 학습 알고리즘 과정을 흐름도 (flowchart)로 나타낸 것이다. 지도학습에서는 입력 및 원하는 출력 패턴이 네트워크에 제시된다. 네트워크는 입력층에 주어진 입력패턴이 출력층에 전파되면서 변화된 출력패턴을 목표패턴과 비교한다. 네트워크에서 출력된 패턴이 목표패턴과 일치하는 경우에는 학습이 일어나지 않는다. 그렇지 않은 경우는 얻어진 출력패턴과 목표패턴의 차이를 감소시키는 방향으로 네트워크의 연결강도를 조절하여 학습을 한다. 인공신경망 학습은 현장자료 (심도, 탄성파 (P파)속도, 좌표 (Station), 전기비저항)를 가지고 실시하였다. 예측값과 실측값의 제곱오차로 표현되는 목적함수의 기울기를 구하여 반복학습에 의한 매개 변수의 최소화를 꾀하였고, 이로서 오류 역전파 학습알고리즘에 의한 최적화 해를 도입하였다. 네트워크에 은닉 유니트가 없는 경우는 델타 규칙과 동일하다. 즉 p번째의 입력, 목표출력패턴이 제시되는 경우에 노드 i에서 노드 j로의 연결강도의 변화는 식 (1)과 같이 표현된다.
 (1)
(1)
 : p번째 목표출력 패턴의 j성분
: p번째 목표출력 패턴의 j성분
 : p번째 입력패턴으로부터 네트워크가 계산한 출력의 j성분
: p번째 입력패턴으로부터 네트워크가 계산한 출력의 j성분
 : p번째 입력패턴의 i 성분
: p번째 입력패턴의 i 성분
 : 목표출력과 실체출력의 오차
: 목표출력과 실체출력의 오차
 : 입력층 i유니트로부터 출력층 j유니트의 연결강도 변화량
: 입력층 i유니트로부터 출력층 j유니트의 연결강도 변화량
4.인공신경망의 학습

4.1 입력자료의 생성
일반적으로 대심도구간의 터널암반은 수억년간의 지체구조적인 응력장의 형성과 열적 및 역학적인 응력장의 교란으로 실지 지질이 복잡하다는 특징이 있다. 반면에 분석적인 모델은 비교적 단순화시킬 필요가 있으며 또한 실지 현장에서 지반데이타를 총괄 세트로 입수하기가 어렵고 현재의 기술로 정량화된 표현이 불가능한 부분도 존재한다. 본과업에서는 이러한 문제점들을 사전 인식하고, 지반조사에서 획득한 이론적이고 경험적인 모든 정보들을 최대한 활용한 터널암반분류 모형을 수립하고자 하였다. 모형화 과정에서 전제조건으로서 요구되는 인자로는 ① 입력 지반데이타 자료의 일치성 (consistency) ② 터널 위치별 및 심도별 불연속면 방향성의 연속성 ③ 터널굴착 암반의 균질성 ④ 예측 RMR 과 실측 RMR 의 오차 최소화를 위한 가정의 적정성 등이다.
4.2 인공신경망을 적용한 암반분류 모형
본연구에서 사용된 인공신경망 모델은 비선형 연상기억모델로 입력층 (input layer), 2개의 중간층(hidden layer), 출력층 (output layer)의 4개 층으로 이루어져 있는 다층 인식자 모델이다. 입력층은 RMR값을 예측하기 위한 기본 자료를 입력하는 층으로 여기에 입력된 자료는 중간층을 거친 뒤 출력층을 통해 예측 RMR이 나오게 된다. 이 과정은 그림 4에 나타내었다. 중간층 처리소자의 수, 연결강도 (weight value, w), 학습률 (learning rate, η) 및 threshold value (θ)는 자유롭게 결정할 수 있도록 하였다. 암반분류 예측을 위한 입력자료로는 탄성파속도 (Vp), 심도, 좌표 (Station) 그리고 전기비저항을 적용하였다. 그리고 예측RMR을 비교․검토하기 위해 사용한 실측RMR은 실제 시추조사에 의해 구한 결과이다. 인공신경망에 의해 구한 예측RMR은 시추조사에 의해 얻은 실측RMR과 비교․검토하여 적용성 여부를 검토하였다.
또한 입력값이 4개에서 2개까지 case 별로 암반분류를 예측해 보았다. 오차역전파 학습알고리즘의 적용 위한 변수 값들과 다른 사항은 표 1과 같다.
4.3 암반분류 예측의 선정
인공신경망은 학습을 반복하는 동안 최급하강법으로 오류 (Ep)를 수정해 간다. 패턴 p에 대한 오류의 제곱은 식 (2)와 같고 전체 패턴에 대한 오류의 제곱의 총합은  이다.
이다.
 (2)
(2)
그림 5는 각 변수들의 값으로 구성된 인공신경망 모델이 학습 진행되는 동안 학습반복횟수에 따른 오류 (Ep)를 나타낸 것으로 매개변수가 최적화되어 가는 과정이라 할 수 있다. 반복 횟수는 2만번에서 10만번까지 2만번씩 증가시키면서 수행했으며 수행횟수를 증가시키면서 오류 (Ep)값의 변화를 확인하였다. 그리고 오류값이 0에 수렴하는 횟수 (iteration number)를 확인하였다.
학습의 반복횟수가 4만번 이상의 경우 오류 (Ep)는 점점 감소하여 0에 수렴함을 볼 수 있다. 그러나 Case 4와 Case5의 경우는 각각 8만번, 6만번 반복횟수 때 오류 (Ep)가 일시적으로 증가하는 경향을 보이나 그 이후 다시 0에 수렴함을 볼 수 있었다. 이러한 오차값이 0에 수렴하는 것으로 보아 다섯 가지 경우에서 학습의 잘 이루어 졌다 할 수 있다. 이와 같은 반복학습에서 Case별로 각각 연결강도 (weight value, w), threshold value (θ)를 결정하였다. 이렇게 결정된 연결강도와 thre-shold value를 인공신경망 모델에 적용하여 미시추간에서 RMR을 예측하였다. 각 Case별 및 반복횟수 때 만들어지는 예측RMR은 실측RMR과 통계분석을 실시하여 최소의 오차를 가지는 경우를 가지고 실제 현장에 적용하였다. 최소오차를 가지는지에 대한 검증을 위하여 신뢰성분석을 실시하였다.
4.4 신뢰성 분석
RMR을 예측하기 위해 2만번 단위로 10만번까지 반복학습 하였으며, 모든 경우 중 최소의 오차를 가지는 반복횟수를 알아보았다. 이러한 방법은 통계분석을 이용하였다. 신뢰성을 높이기 위해 사용된 내용통계분석은 평균오차 (ME), 오차의 분산 (Var.(E)), 평균절대편차 (MAD), 표준개산오차 (SSE), 평균절대백분율오차 (MAPE) 그리고 시계열오차 (TSE)로 식 (3~9)과 같다.

 (3)
(3)
 : 실측RMR,
: 실측RMR,  : 예측RMR,
: 예측RMR,  : 오차 안전율,
: 오차 안전율,
N: 자료수
 (4)
(4)

 (5)
(5)
 (6)
(6)

 (7)
(7)
 (8)
(8)

 (9)
(9)
이와 같은 식을 적용한 통계분석 결과는 그림 6 (a)~(f)와 같다. 평균오차 (ME)는 Case 5를 제외하고 대다수 경우의 반복횟수에서 -2.0~1.0의 값으로 조사되었다. 이 내용은 예측RMR과 실측RMR의 차이가 적게 나타남을 의미한다. 평균절대백분율오차 (MAPE)는 Case 별, 반복횟수별로 조사해본 결과 그림 6 (e)와 같이 계산되었다. 이 결과를 통해 각 Case에서 오차가 최소가 되는 반복횟수 때를 알 수 있다. Case 1과 Case 2는 4만번 반복횟수 때 최소의 오차가 나타나며, Case 3과 Case 4는 8만번 그리고 Case 5는 6만번 때 최소 오차가 나타남을 알 수 있다.
4.5 실측RMR과 예측RMR의 비교
각 Case에서 최소오차를 가지는 학습반복횟수 때 만들어진 인공신경망 모델을 이용하여 예측RMR을 구하였다. 그리고 예측RMR값과 실측RMR값을 비교하였다. 각 Case 별 최소오차는 4.4절에 나타난 것과 같이 Case 1과 Case 2는 4만번, Case 3과 Case 4는 8만번 그리고 Case 5는 6만번 때이며, 이때 만들어진 인공신경망 모델을 가지고 예측RMR을 최종적으로 조사하였다. 그리고 실측RMR과 비교하였다. 이 결과는 그림 7과 같다. 모든 경우에서 결정계수 (R2)가 0.75이상의 값으로 일직선상에 나타나고 있다. 이러한 값은 실제값과 정확한 값을 나타내지는 못하나 예측값으로 사용하는데 신뢰도가 높다고 할 수 있다. Case 1과 Case 2는 앞절에서 확인한 것과 같이 오차값이 적은 값으로 학습이 다른 경우보다 잘 되었으며, 다른 Case에 비해 결정계수도 8.0 이상으로 높게 나타나고 있다. 이러한 결과는 실제 입력값이 4개인 경우가 입력값이 2개, 3개인 경우보다 신뢰도가 높으며, 입력값이 3개인 경우에도 심도, 좌표 (STA), 전기비저항을 입력하였을 경우 오차가 적음을 의미한다.




5.터널구간 RMR 분포 결과
본 연구에서는 실제 현장의 터널 미시추구간에서 학습된 인공신경망 모델을 이용하여 RMR을 예측하였다. 적용모델은 각 Case별 최소오차를 가지는 학습 반복횟수때 만들어진 인공신경망 모델을 이용하였다. 본 연구는 지질학적인 구조의 영향, 차별풍화대 및 단층대에 대한 특성을 제외시킨 후 인공신경망을 학습하였다.
실제 물리탐사를 통해 예측 할 수 있는 차별풍화대 및 단층대는 예측RMR을 적용할 경우 실제값과 큰 오차가 예상된다. 그래서 물리탐사를 통해 예측된 이러한 구간은 기술자의 판단 (engineering judgement)에 따라 정성적인 값을 적용하였다. 그리고 시추구간에서는 시추에 의해 확인한 RMR값을 적용하였으며, 인공신경망을 이용한 예측RMR은 단지 미시추구간에만 적용하였다. 이러한 경우를 종합해서 연장 4Km인 △△터널 전구간에서 RMR분류를 확인할 수 있었다. 이와 같은 내용의 적용결과는 그림 8과 같다.
6.결론 및 고찰
|
| |
(a) STA. 82Km~83Km700 2차원 예측RMR분포 | (b) STA. 83Km700~86K 2차원 예측RMR분포 | |
|
| |
(c) STA. 82Km~83Km700 3차원 예측RMR분포 | (d) STA. 83Km700~86K 3차원 예측RMR분포 |

본 연구에서는 물리탐사 자료를 근거로 인공신경망을 적용하여 미시추구간에서 RMR을 예측하였다. 그리고 이 예측RMR과 실제 시추공에서 구한 실측RMR과 타당성 여부를 확인하였으며, 현장적용성을 검토하기 위하여 4㎞연장의 △△철도터널 구간에 적용하였다. 본 연구에서 검토한 결과는 다음과 같다.
1. 입력항목이 2~4가지를 가지고 각각의 case 별로 인공신경망을 반복학습 후 RMR값을 예측하였다.
2. 인공신경망 모형선정의 필수 전제조건으로는 ① 입력 지반데이타 자료의 일치성 (consistency) ② 터널 위치별 및 심도별 불연속면 방향성의 연속성 ③ 터널굴착 암반의 균질성 ④ 예측 RMR 과 실측 RMR 의 오차 최소화를 위한 가정의 적정성 등이 요구된다.
3. 다층 인공신경망 모델을 설정 후 학습효과를 높이기 위해 2만번에서 10만번까지 2만번 단위로 반복 학습을 실시하였다.
4. 인공신경망을 적용한 예측값과 실제 시추공에서 구한 실측값을 가지고 비교․검토해 본 결과 대부분에서 평균절대백분율오차 (MAPE)가 2~13%, 결정계수 (R2)가 0.75이상으로 실측값과 유사한 값이 예측되었다.
5. 연장 4km인 △△터널 구간에 물리탐사 입력자료의 유무에 따라 각 Case별로 학습된 인공신경망 모델을 이용하여 미시추구간에 RMR값을 예측하였다. △△터널 전구간에서 시추구간은 실측RMR값, 미시추구간에서는 예측 RMR값 그리고 차별풍화대 및 단층대 구간은 기술자의 판단 (engineer judgement)에 따라 조사된 RMR값을 2차원과 3차원으로 각각 나타내었다.
6. 본 연구를 통해 부족한 입력항목 (물리탐사자료)을 가지고 미시추구간에서 RMR값을 예측할 수 있음이 확인되었고 실제 터널구간에 적용하였다.
7. 인공신경망을 이용하여 더욱 정확한 암반분류를 하기 위해서는 최적의 인공신경망모델의 설정과 신뢰성 높은 입력항목을 가지고 추가적인 연구가 요구된다.
