
1. 서 론
2. 3차원 BIM 설계 모델의 단면 추출 프로세스
3. 스캐너의 터널 스캔 데이터 처리 프로세스
3.1 3D 스캐너 제원
3.2 스캔 데이터의 획득
3.3 스캔 데이터 정렬 프로세스
3.4 스캔 데이터의 격자망 모델링
5. 3차원 BIM 설계 모델과 스캔 데이터 비교를 통한 여굴량 및 미굴량 산정
5.1 BIM 모델과 스캔 데이터의 비교
5.2 현장 데이터 적용
6. 결 론
1. 서 론
NATM 터널 공사에 있어서 여굴 및 미굴의 발생은 빈번하며, 이러한 여굴 및 미굴의 발생을 최소화 시키는 목적은 암반의 손상방지와 터널 설계 단면의 최적화 유지에 있다. 여굴이 과다하게 발생하게 되면 암반보강을 위한 록볼트 및 숏크리트 타설 등의 보강비 및 라이닝 콘크리트의 수량 증가를 수반하며, 미굴이 발생하게 되면 추가적인 굴착 비용의 발생 등을 초래하여 공사비 증가의 주된 요인으로 작용하게 된다. 기 발표된 통계자료에 의하면 터널 굴착선 여굴에 의해 추가로 소요되는 비용은 터널 공사비의 15~18%를 차지하는 것으로 나타나고 있다(이태노 등, 2002). 따라서 여굴량 측정을 위해서는 정확한 계측이 필요하며, 현재 터널에서 천단침하 및 내공변위는 재래식 측량인 토털스테이션(total station)에 의존하고 있는 실정이다. 여굴량 산정을 위한 토털스테이션을 사용한 터널내공단면측량은 시공공정에 따라서 매 발파 직후 또는 숏크리트 타설 직후에 수시로 실시해야할 뿐 아니라 발파, 버럭제거, 숏크리트 타설 등이 연속적으로 시공되는 과정에서는 공정 간에 잠시 발생되는 여유시간을 잘 포착하여 신속히 완료해야 한다. 그러나 토털스테이션의 경우 1점 측위 방식으로서 시간이 과다 소요되며 배점밀도가 낮으므로 제한된 시간 내에 내공단면측량을 완료하기 위해서는 부득이 변곡점 위주의 단면측량을 하게 됨으로써 정밀한 성과를 취득하기가 어려운 단점이 있다. 또한 외국에서 주로 이용되었던 Tunnel Profiler(입력된 데이터에 따라 천공될 터널윤곽선을 3D로 스캔하여 보여주는 프로그램)는 무반사경 광파거리계에 모터를 장착하여 1단면씩 자동측위를 수행하나, 이 방법 역시 배점밀도가 낮고 매번 기계를 옮길 때마다 기계점 위치를 측량해야 하며, 특히 곡선구간에서는 정확한 횡단면 측량이 어렵다는 단점이 있다(김인섭, 2007).
3차원 레이저 스캐너는 정확한 3차원 좌표 값을 취득함으로써 지형 및 구조물에 대한 상세한 정보를 얻을 수 있어 최근 철도, 도로, 수공학, 터널 등의 토목 분야에서도 그 활용성이 증가되는 추세이며, 터널에서는 스캐너를 활용한 암반사면의 절리 및 안정성 평가(이승호 등, 2004; 곽영주 등, 2005; 임은상 등, 2006), 터널에 스캐너를 적용하기 위한 방안 및 개발에 관한 연구(사공명 등, 2006; 사공명 등, 2007; Yoon et al., 2009; 이강현 등, 2010), 등이 이루어졌으며, 그 중에서도 터널의 여굴량 및 미굴량 산정에 있어 3차원 레이저 스캐너를 활용한 연구 역시 다수 이루어 졌다(Lindenbergh et al., 2005; 이종출 등, 2006; 김인섭과 임수봉, 2007; 노태호 등, 2008; 이태형 등 2008; 이강현 등, 2011).
그러나 3차원 레이저 스캐너를 활용한 터널의 여굴량 및 미굴량 산정에 있어, 기존 대부분의 연구에서 사용한 도달 시간(TOF, Time of Flight)측정 방식의 스캐너는 터널의 형상을 완벽하게 구현할 만큼의 데이터를 취득하는데 많은 시간이 소요되어 터널 시공공정에 지장을 초래하므로 실제 현장에 적용하기 어렵다. 또한 소프트웨어의 경우 Rapid Form 2006(아이너스 기술 社,) 좌표추출 프로그램인 3D Extractor는 단순한 데이터 처리만 가능하며, 3차원 레이저 스캐너 제조 업체 Trimble 社에서 제공하는 소프트웨어인 RealWorks Survey도 스캔 데이터를 3차원 좌표로 변환하고, 구조물의 단순한 형태를 제공하는 수준이다. 따라서 설계단면과 비교를 통한 터널 시공관리 및 유지관리에 활용하기 위해서는 별도의 작업 등이 필요하며, 터널 전체구간의 대용량의 스캔 데이터를 처리 하는데 수 시간이 소요된다. 따라서 RealWorks Survey 소프트웨어로부터 얻어진 데이터를 활용할 수 있도록 노태호 등(2008)은 터널단면 관리시스템을 개발하여 프로그램 상에서 터널 설계단면과의 비교를 통한 여굴량 및 미굴량을 파악할 수 있도록 하였다. 또한 3차원 레이저 스캐너로 얻어진 데이터의 용량이 너무 크고 우리 실정에 맞는 소프트웨어가 없어서 측정된 데이터를 3차원 형상으로 보기만 하는 수준에 머무를 뿐이라 실제 현장에서 필요로 하는 가공된 데이터가 부족하여 현장에서 실제로 사용하기에는 어려움이 존재한다(이강현, 2011).
또한, 터널의 미굴량 및 여굴량을 산정하는 기존의 연구에서는 실제적으로 3차원 레이져 스캐너의 활용에 대한 연구가 주를 이루었으며, 취득한 데이터와 비교하는 도면은 모두 2차원 기반의 캐드 도면이었다. 그러나 비교적 단순한 형태의 터널 구조물이라 하더라도 정확한 여굴량 및 미굴량을 산정하기 위해서는 3차원의 터널 형상과 비교가 필요하다. 본 연구에서는 터널의 설계 도면을 2차원 캐드 도면이 아닌 3차원 BIM(Building Information Modelling)을 사용하였으며, 3차원 스캔 데이터와 비교를 위하여 BIM 모델의 도면 추출 프로세스를 개발하였다. 이와 더불어 취득한 스캔 데이터의 효율적인 처리 프로세스를 개발하여 터널의 여굴량 및 미굴량 산정 시공오차 프로그램을 개발하였으며, 실제 현장에서 취득한 3차원 스캔 데이터를 활용하여 터널의 여굴량 및 미굴량을 산정하였으며, 프로그램의 성능을 검증하였다.
2. 3차원 BIM 설계 모델의 단면 추출 프로세스
3차원 설계 도면인 BIM 모델과 3차원 스캔 데이터를 비교하기 위해서는 비교되는 단면의 위치 정보와 스캔 데이터의 위치 정보가 있어야 동일한 위치에서의 설계 단면과 실제 스캔 데이터 사이의 비교가 가능하다. 이를 위해서 설계 도면의 위치 정보를 정의해줄 필요가 있으며, 이를 위하여 설계 단면상의 station 축(터널 선형 곡선)을 기준으로 위치 정보를 정의하고자 하며 이에 대한 개념은 그림 1과 같다. 우선 시공 대상에 대한 3차원 설계 도면에서 station 축을 이루는 각 좌표값(X, Y, Z)들을 이용하여 station 축과 동일한 3차원 선형 곡선을 생성한다. 이때, 3차원 선형 곡선은 차수를 3차로 하는 스플라인 함수를 이용하는 3차원 스플라인 곡선으로 하였다.
이후, 이와 같이 생성된 3차원 선형 곡선 상의 임의의 좌표값(X, Y, Z)에서의 위치값(dv)과 실제 station 축과의 보간 테이블을 생성한다. 이 때, 임의의 좌표값에서의 위치값(dv)이란, 3차원 선형 곡선의 출발점에서 해당 좌표값까지의 3차원 선형 곡선 상의 거리를 의미한다.
위와 같이 3차원 선형 곡선 상의 임의의 좌표값에서의 위치값(dv)과 실제 station 축과의 보간 테이블을 생성하는 이유는 다음과 같다. 생성된 3차원 선형 곡선은 그 출발점 위치를 0으로 보고 그 출발점으로부터의 상대적인 곡선 거리를 위치값(dv)으로 나타낸 것이므로, 이는 실제 station의 위치(전체 시공 구간에서 해당 station이 위치하는 지점까지의 거리)와 다른 값을 갖게 된다. 따라서 이러한 3차원 선형 곡선 상의 특정 위치값(dv)과 실제의 station의 위치를 매칭시켜 줄 필요가 있으며, 이를 위하여 보간 테이블을 생성하였다.
이러한 과정을 통해 3차원 설계 도면으로부터 3차원 선형 곡선 및 각 위치값(dv)이 결정되고, 이에 관한 실제 station 축과 보간 테이블이 생성되면, 3차원 설계 도면의 위치 정보 입력이 완료된다. 이러한 위치 정보 입력 후에는 스캔 데이터와 비교를 위해 단면을 정의해주는 과정이 필요하다.
먼저 3차원 설계 도면에 대응되는 모델링 파일을 열고, 이에 대한 단면 좌표 파일을 생성하게 된다. 앞서 생성된 3차원 선형 곡선에서 해당 station 축 위치와 대응되는 곡선 상의 위치값(dv)을 계산한다. 이와 같이 해당 곡선 상에서 대응되는 위치값(dv)이 계산되면, 해당 위치(dv)에서의 곡선의 방향 벡터를 법선으로 하고 해당 위치를 지나는 평면을 생성한다.
이와 같이 평면이 생성되면, 해당 평면과 3차원 모델링 설계 도면이 교차하는 단면 곡선이 생성될 수 있다. 이와 같이 단면 곡선이 생성되면, 이러한 단면 곡선을 스플라인 함수 등을 이용하여 선형 곡선으로 표현하고 이를 저장한다. 이 때 선형에 수직하는 단면을 취득하여 계산하기 때문에 터널의 곡률이 반영되게 된다. 앞에서의 과정은 시공 구간 내의 모든 모델링 데이터에 대하여 수행됨으로써, 그 모델링 데이터들과 관련된 선형의 단면 곡선들이 생성된다. 이와 같이 모델링 데이터에 근거하여 생성된 선형의 단면 곡선들은 스캔 데이터에 근거한 단면 좌표 데이터와 비교됨으로써, 특정 분석 구간에 대한 시공 오차를 분석하는데 이용된다. 상술한 과정을 통해 생성된 선형의 단면 곡선들에 대한 예시가 그림 2에 도시되고 있다.
3. 스캐너의 터널 스캔 데이터 처리 프로세스
3.1 3D 스캐너 제원
표 1. 3차원 레이저 스캐너의 제원 | ||
제조사/스캐너 모델명 | Z+F Imager 5003 | |
모델 사진 |
| |
스캔 방법 | 위상 차(Phase shift) 측정 | |
스캔 시야 [°] | 360 × 310 | |
스캔 거리 [m] | 1∼53.5 | |
스캔 속도 [Pts/''] | 500000 | |
각 해상도 [°] | 수직 | 0.018 |
수평 | 0.01 | |
스캔 정밀도 [mm] | 6 | |
스캐너 조작장치 | 노트북 | |
카메라 장착여부 | 선택사항 | |

3차원 레이저 스캐너는 레이저 방식 이외에도 카메라 방식이 있으나, 본 연구에서는 레이저 방식의 고정밀 대용량 스캐너를 사용하였으며, 고용량의 3차원 데이터를 터널 특성에 맞게 변환하고 이를 실제 현장에 적용하기 위한 연구이므로, 공기지연이 발생하지 않도록 초당 측정 속도가 빨라서 스캔 시야 전 구간을 스캔 하는데 걸리는 시간이 약 3.5분 정도인 Z+F Imager 5003 레이저 스캐너를 이용하였다. 레이저 스캐너의 제원은 표 1과 같다.
3.2 스캔 데이터의 획득
시공 중인 터널에서 3차원 스캐너를 활용하여 획득한 스캔 데이터 포인트들은 스캐너를 기준으로 측정된 로컬좌표계의 (x, y, z) 값을 가지고 있다. 반복되는 스캔 작업으로 얻은 각 데이터들은 각각 스캐너를 기준으로 한 로컬좌표계 값을 가지고 있으므로, 이러한 데이터들을 통합적으로 활용하기 위해서는 각 데이터의 로컬좌표계를 절대좌표계로 변환해줄 필요가 있다. 이를 위하여 그림 3과 같이 스캐너 주위 4곳에 표적지를 설치하여 3차원 레이저 스캐너와 광파기로 표적지의 좌표를 획득한다. 이렇게 획득한 표적지의 절대좌표계 값 및 스캐너로 획득한 로컬좌표계 값과 스캐너 소프트웨어의 변환매트릭스를 활용하여 스캔 데이터의 절대좌표 값을 획득하게 된다.
3.3 스캔 데이터 정렬 프로세스
1회의 스캔 작업으로 취득되는 데이터 포인트는 약 5,000만점 이상의 클라우드 포인트로 구성되며, ZFS 파일의 형태로 저장된다. 터널 굴착이 진행됨에 따라서 다수의 스캔 작업을 수행하게 되고 이때 스캔 작업 횟수만큼 ZFS 파일이 생성된다. 원하는 위치의 여굴량 및 미굴량을 산정하기 위해 필요할 때마다 스캔 데이터를 검색하게 되면, 10개의 스캔 데이터만 활용한다고 해도 5억 만점 이상의 클라우드 포인트를 검색하여야 하며, 처리 속도가 과도하게 증가하게 된다. 따라서 취득된 데이터를 활용하기 위해 효율적인 후처리 과정이 필요하다.
스캔 데이터의 후처리 과정에 있어 우선적으로 클라우드 포인트의 데이터 정렬과정이 필요하며 이에 대한 개념은 그림 4와 같다. 스캔 데이터를 정렬하는데 있어 앞에서 언급했던 3차원 BIM 모델의 위치 기준으로 정했던 station 축을 스캔 데이터 정렬에서도 동일한 기준으로 사용하고자 한다. station 축으로 정렬하는 과정은 다음과 같다.
먼저, 획득된 3차원 스캔 데이터를 포함하는 스캔 파일을 열고, 변환 완료될 단면 좌표 데이터들을 저장할 단면 좌표 파일을 생성한다. 이후, 3차원 스캔 데이터의 포인트(X, Y, Z)를 읽어 들인다. 읽어 들인 스캔 데이터의 포인트는, 측량 좌표인 X, Y, Z 값들로 구성되어 있으므로, 그 측량 좌표와 대응되는 station 축 위치에서의 단면 좌표로 변환할 필요가 있다. 앞서 station 축을 기준으로 생성된 3차원 선형 곡선 상에서 해당 포인트와 가장 가까운 포인트 위치(dv)를 검색하고, 그 검색된 포인트 위치값(dv)을 앞서 생성된 보간 테이블에 기초하여 그 포인트 위치(dv)와 맵핑되는 station 값으로 변환하면, 스캔 데이터의 해당 포인트와 대응되는 station 위치를 확인할 수 있다.

앞선 3차원 BIM 설계 모델의 단면 추출 프로세스에서와 마찬가지로, 스캔 데이터의 해당 포인트에 대응되는 station 위치가 확인되면, 위 검색된 포인트 위치(dv)에서의 곡선의 방향 벡터 (3차원 선형 곡선 상의 해당 포인트 위치(dv)에서의 접선 방향의 벡터)가 결정된다. 그리고 그 결정된 방향 벡터를 법선으로 하고 스캔 데이터의 해당 포인트를 지나는 평면을 생성하면, 해당 포인트에 대응되는 station 위치에서의 단면이 생성되게 된다.
따라서 해당 단면을 station 축과 단면의 교차점을 기준으로 하여, 그 스캔 데이터의 해당 포인트의 위치를 계산하면, 스캔 데이터의 해당 포인트(측량 좌표 X, Y, Z)를 이에 대응되는 station 위치에서의 단면에 관한 단면 좌표(station, X, Y)로 변환하여 표현할 수 있다. 이와 같이 변환된 단면 좌표는 단면 좌표 파일에 저장된다.
상술한 과정은 스캔 데이터에 포함된 모든 포인트에 대하여 연속적으로 반복 수행되며, 어느 하나의 스캔 파일 내의 데이터들이 모두 단면 좌표 데이터로 변환되면, 단면 좌표 파일을 닫고, 다음 스캔 파일로 이동한다. 다음 스캔 파일에 대해서도 상술한 과정이 반복되며, 스캔 파일이 더 이상 존재하지 않는 경우에는 위 프로세스는 종료된다. 상술한 과정을 통해서, 측정된 스캔 파일 내의 모든 데이터들에 대해서 단면 좌표 데이터로의 변환이 완료될 수 있다.
변환 저장된 단면 좌표 데이터들은 각각의 단면 좌표 파일 내에서 station 별로 구분되어 저장되어 있는 것이 아니므로, 데이터 정렬을 위하여 station 축을 기준으로 정렬하게 된다. 이와 같이 정렬 저장은 데이터 검색의 속도를 높여 효율적인 시공 오차 분석이 가능하게 한다.
우선, 해당 분석 구간에 대한 단면 좌표 파일들이 생성되면, 그 리스트를 구성하고, 단면 좌표 파일을 열어, 이를 메모리에 올린다. 이때 메모리의 데이터는 station 값 별로 정렬되고, 이와 같이 정렬된 데이터를 단면 좌표 파일에 저장한다. 위와 같은 과정은 모든 단면 좌표 파일에 대하여 반복됨으로써, station 별로 정렬 저장된 단면 좌표 파일을 생성할 수 있다.
이 후 station을 기준으로 정렬되어 저장된 단면 좌표 파일을 하나의 통합된 데이터로 결합하는 과정이 이어지게 된다. 왜냐하면 각각의 스캔 데이터는 데이터들이 병렬식으로 분산되어 있기 때문에 원하는 단면의 데이터를 얻기 위해서는 모든 스캔 데이터들을 검색하는 과정이 필요하며 이것은 과도한 처리 시간이 소요될 수 있다. 또한 각 스캔 데이터 간에 중첩구간이 있기 때문에 이에 대하여 정의해줄 필요가 있다. 통합과정은 각각의 station으로 정렬된 개별적인 파일을 열고 각 파일의 station 좌표를 읽어 들여 station 순서에 따라서 DB에 저장하게 된다. 이때에 각각의 개별적인 파일 중에 서로 중첩되는 구간이 있으면, 중첩되는 데이터는 평균값을 사용하게 된다.
3.4 스캔 데이터의 격자망 모델링
앞에서 언급하였듯이 스캔 데이터는 클라우드 형태로 굉장히 많은 수의 데이터로 이루어져 있으며, 터널 단면의 형태로 얻어지는 데이터는 일정한 두께의 점군을 형성하고 있다. 이는 레이저 스캐너가 1∼2 mm 정도의 측정오차를 가지고 있기 때문이며, 또한 숏크리트가 타설된 터널 벽면은 표면이 거칠기 때문에 측정 결과 역시 일정한 두께를 가진 점군 데이터가 획득된다. 이러한 클라우드 포인트를 직접적으로 BIM에서 추출한 단면과 비교하기에는 많은 시간이 소요되며, 점군 데이터가 일정한 두께를 가지고 있기 때문에 이를 하나의 면으로 변환하는 과정이 필요하다.
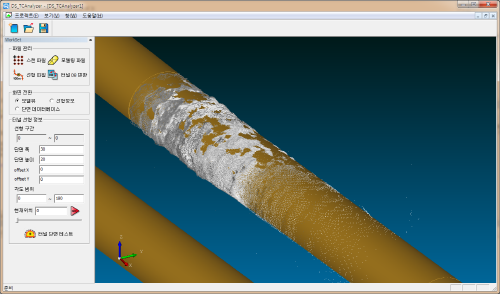
본 연구에서는 이를 위해서 터널 벽면을 가상의 일정한 크기의 격자로 이루어진 격자망 형태로 변환하여 데이터를 이 격자망에 채워 넣는 개념을 도입하였다. 격자망으로 데이터를 변환하게 되면, 각각의 데이터 포인트들을 하나하나 비교하는 것이 아니라 일정한 면적의 격자 값과 비교하게 되므로 처리속도가 빠르게 되며, 하나의 격자망 안에서는 그 안의 데이터 값들의 평균을 사용하게 되기 때문에 값이 비정상적으로 측정된 데이터나 그림 5와 같이 터널 벽면의 거칠기로 인해 직선인 레이저가 도달하지 않아 측정이 되지 않은 데이터 포인트들에 대한 보정이 이루어지게 된다. 그러나 격자의 크기가 과도하게 증가하게 되면 하나의 격자 영역을 평균값을 사용하여 동일한 값으로 산정하기 때문에 여굴량 및 미굴량의 산정이 부정확하게 될 가능성이 있으며, 이와 반대로 너무 작은 격자 크기를 사용하게 되면 데이터 처리속도가 감소하게 되고 레이저 미도달 영역에 대한 보정이 이루어지지 않게 된다. 따라서 적절한 격자크기의 산정이 필요하며, 이에 대한 연구는 현장 적용 평가 시에 격자크기에 따른 여굴량 및 미굴량을 산정하여 그 영향을 검토하고자 한다.
하지만 스캔 데이터의 특성상 대용량이기 때문에 모든 데이터를 한 번에 격자모델에 넣는 작업을 하기는 비효율 적이므로 station을 30 m 단위로 구분하여 순차적으로 격자 모델을 생성하였다. 이에 대한 개념은 그림 6과 같다.
또한 격자망으로 모델링 된 데이터는 쉽게 이미지화가 가능하며, 격자망이 터널의 벽면을 2차원 적으로 펼쳐진 형상이기 때문에 각 격자망에 해당하는 컬러값을 취득하여 이미지 배열을 생성한다. 스캔 데이터를 이미지화하는 원리는 터널 벽면의 상태에 따라서 반사되는 레이저의 강도가 다르게 측정되기 때문에 이러한 것을 이용하여 하나의 격자는 하나의 픽셀을 차지하게 된다.
5. 3차원 BIM 설계 모델과 스캔 데이터 비교를 통한 여굴량 및 미굴량 산정
5.1 BIM 모델과 스캔 데이터의 비교
스캔 데이터의 정렬 프로세스가 모두 완료되고 난 후에는 3차원 BIM 설계 모델과 비교를 통하여 여굴량 및 미굴량을 산정하게 된다. 우선 데이터베이스 정보파일을 열고, 해당 파일에서 실제 시공 오차 분석이 필요한 분석 구간에 상응하는 station 범위 블록들을 불러오고, 3차원 BIM 설계 모델에서 추출한 해당하는 구간의 단면을 불러온다. 해당 단면의 설계 단면에 관한 단면 곡선과, 단면 좌표인 스캔 데이터가 획득되면, 다음 그림 7과 같이 단면 중심과 격자망으로 표현된 단면 좌표인 스캔 데이터를 이은 선분과 설계 단면 곡선 간의 교차점을 계산한다.
이와 같이 계산된 교차점을 기준으로 하여, 그 교차점이 단면 좌표인 스캔 데이터 보다 밖에 위치하는 경우에는 미굴로 판단되고, 그 안에 위치하는 경우에는 여굴로 판단되게 된다. 또한 단면 중심과 스캔 포인트와의 거리에서 단면 중심에서 단면 곡선 사이의 거리의 차(D)를 계산할 수 있다. 거리의 차(D)가 산정되면 하나의 격자의 크기(횡방향 길이)를 곱하여 2차원 단면상의 미소 미굴 및 여굴량 면적을 산정한다. 이후에 해당하는 면적에 격자망 크기(종방향 길이)를 곱하여 미소 여굴량 및 미굴량 부피를 산정하게 되고 하나의 격자망 안에 해당하는 각 미소 부피를 모두 합산하여 미굴량 및 여굴량을 최종적으로 산정하게 된다. 이는 다음의 식과 같다.



위의 계산 과정은 해당 구간의 전 단면에 대하여 이루어지며, 비교되는 단면 수는 격자의 크기에 반비례한다. 즉, 한 격자의 크기마다 스캔 데이터와 BIM 추출 단면을 비교하게 되며, 따라서 격자의 크기가 작아지게 될 때는 비교하는 단면이 많아져서 결과가 정밀하게 되며, 격자 크기가 커지게 되면 비교하는 단면의 수가 감소하게 된다.
분석 구간 내의 모든 데이터들에 대하여 미굴량, 여굴량이 각각 합산 계산되면, 분석 구간 전체의 총 시공 오차가 계산될 수 있다. 여기서, (여굴량-미굴량)의 수식을 이용하는 것은, 미굴량의 경우를 음(-)의 값으로 설정한 경우를 가정한 것이며, 미굴량 및 여굴량 모두 각각 양(+)의 값으로 설정한 경우는 양자를 합산하게 될 것이다. 분석 구간 전체의 총 시공 오차를 계산하고 있지만, 위에서 산출된 수치들을 이용하여 각 station 별로의 시공 오차를 계산할 수도 있으며, 미굴량, 여굴량 각각에 따른 시공 오차도 구할 수 있음은 물론이다. 또한, 미굴 또는 여굴의 위치도 계산 역시 가능하다.
5.2 현장 데이터 적용
|
|
(a) 3차원 BIM 설계 모델 | (b) 3차원 스캔 데이터 |
|
|
(c) 추출 단면 및 스캔 데이터 | (d) 스캔 데이터와 설계 단면 비교 |
그림 8. 3차원 BIM 설계 모델 및 스캔 데이터 이미지 | |
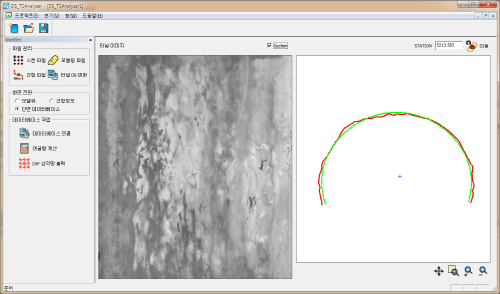
본 연구에서 개발한 3차원 레이저 스캐너와 3차원 BIM 설계 모델을 활용하여 개발한 시공오차 프로그램을 실제 시공 중인 터널 현장에 적용하여 여굴량 및 미굴량을 산정하였다. 스캔한 터널 구간의 암은 풍화암으로 총 23 m 구간이며, 스캔은 총 5회 수행하였다. 해당 터널에 대한 3차원 BIM 모델 및 스캔 데이터와 비교 형상은 그림 8과 같다.
앞에서도 언급하였듯이 격자의 크기가 과도하게 증가하게 되면 하나의 격자 영역의 평균값을 사용하여 동일한 값으로 산정하기 때문에 여굴량 및 미굴량의 산정이 부정확하게 될 가능성이 있으며, 이와 반대로 너무 작은 격자 크기를 사용하게 되면 데이터 처리속도가 감소하게 되고 레이저 미도달 영역에 대한 보정이 이루어지지 않게 된다. 따라서 본 연구에서는 스캔 데이터 후처리 과정에 있어 사용되는 격자망 크기를 10∼100 mm로 변경해 가면서 여굴량 및 미굴량 결과를 산정 하였다. 격자망의 크기가 10 mm라는 것은 한 변이 10 mm의 정사각형에 해당하는 스캔 데이터를 동일한 평균값으로 본다는 것을 의미하며, 기존의 측량에서는 터널 단면 중 몇몇의 포인트의 값을 측정하여 여굴량 및 미굴량을 판단하는데, 3차원 레이저 스캐너는 그에 비하여 최대 격자망 크기 100 mm를 적용하여 얻는 결과라고 하여도 기존 측정 방법에 비하여 비교할 수 없이 정밀한 결과를 산출한다고 볼 수 있다.
또한, 스캔 데이터의 처리 속도 증가를 위하여 스캔 데이터의 1/16만을 사용하여 취득한 데이터 전부를 사용하여 얻는 결과와 비교 분석을 수행하였다. 데이터의 1/16만을 사용하게 되면, 처리속도는 16배 증가하는 것으로 볼 수 있다. 산정된 여굴량 및 미굴량은 다음 그림 9 및 표 2와 같다.
표 2와 그림 9에서 보듯이 계산된 여굴량 및 미굴량은 격자면적이 최대 100배까지 증가하여도 그 변화량은 작았다. 여굴량을 보면, 10 mm 격자 크기일 때의 결과를 기준으로 최대 0.47%(격자크기 100 mm 일 때)의 차이만 보여주어, 격자 크기와 상관없이 유사한 결과를 보여주었다. 미굴량의 경우, 10 mm 격자 크기일 때의 결과를 기준으로 최대 2.39%(격자크기 90 mm 일 때)의 차이를 보여주어 여굴량에 비하여 다소 큰 차이를 보여주었으나, 그 크기는 미미하였다. 미굴량의 경우에는 격자크기가 커짐에 따라서 소폭 감소하는 경향을 보여주었는데 이것은 여굴량에 비하여 격자크기가 커지면서 발생하는 오차가 미굴량 산정 시 더 크게 발생한 것으로 생각되나, 그 크기는 미미하였다.
또한 전체 데이터를 사용한 것과 데이터의 1/16만 사용한 것을 비교하였을 때, 여굴량의 경우 최대 0.28%(격자크기 40 mm 일 때)의 차이를 보여주었고, 미굴량의 경우 최대 0.32%(격자크기 30 mm 일 때)의 차이를 보여주어 전체 데이터를 사용하나 데이터의 1/16만 사용하나 그 결과는 유사하였다. 따라서 데이터의 1/16만 사용하게 되면 처리 시간 역시 1/16로 감소하기 때문에 본 연구결과로는 데이터의 1/16만 사용하는 것이 효율적인 방법이라고 판단된다.
6. 결 론
본 연구에서는 3차원 레이저 스캐너로 획득한 데이터와 3차원 설계 모델링인 BIM을 활용하여 시공 시 발생하는 여굴량 및 미굴량을 3차원적으로 산정하는 시공오차 평가 프로그램을 개발하였으며, 이를 위한 효율적인 스캔 데이터의 처리 프로세스를 제안하였다. 또한 실제 현장에 3차원 레이저 스캐너를 사용하여 시공오차를 산정하였으며, 프로그램의 성능을 검증하였다. 이상의 연구로부터 얻어진 주요 내용을 요약하면 다음과 같다.
1.3차원 BIM 설계 단면으로부터 스캔 데이터와 비교를 위해 설계 단면을 추출하는 프로세스를 개발하였으며, 추출된 단면은 터널의 3차원적 형상(곡률, 반경 등)을 반영할 수 있도록 하였고 이를 통해 터널 단면 중 몇몇의 포인트에 기초하여 여굴량 및 미굴량을 산정하는 기존의 측량 방법에 비하여 정밀한 여굴량 및 미굴량 산정이 가능하게 하였다.
2.3차원 레이저 스캐너로부터 얻은 고용량의 스캔 데이터와 BIM 설계 단면과의 비교를 위하여 station 축에 따른 데이터 정렬 방식을 제안하였으며, 처리속도 및 효율적인 데이터 처리를 위해 격자망 개념을 개발하였다.
3.3차원 BIM 설계 단면과 스캔 데이터의 비교를 통한 여굴량 및 미굴량 산정 프로세스를 개발하여 시공오차 평가 프로그램을 개발하였으며, 실제 시공 중인 터널 현장의 데이터를 취득하여 프로그램을 검증하고, 격자망 크기와 데이터 sampling 비율에 따른 여굴량 및 미굴량에 대한 경향을 파악하여 효율적인 처리 프로세스를 제안하였다.
