

1. 서 론
2. 일본의 성능평가 제도
2.1 공공공사 신기술 활용 시스템(NETIS)
2.2 점검 지원 기술 성능 카탈로그
3. 터널 스캐닝 시스템의 성능 비교 분석
3.1 성능 카탈로그 표준시험 방법
3.2 성능 비교 분석
4. 고찰 및 개발방향
5. 결 론
1. 서 론
우리나라는 1970년대부터 도로, 철도, 교량 등 주요한 인프라 시설물이 확충되어 왔다. 상당수 시설물의 사용 연수가 30년 이상으로 노후화되고 있으며, 10년 후에는 급격하게 증가하면서 막대한 유지관리 비용이 투입될 것으로 예상되고 있다. 미국, 유럽, 일본 등의 선진국들은 우리나라보다 20~30년의 격차를 두고 시설물의 노후화 문제에 직면하였으며, 이에 대한 대응으로 사후 대응적 유지관리가 아닌 예방적 유지관리의 방안을 모색하고 있다. 예방적 유지관리는 시설물을 자산으로 인식하고 유지관리 비용과 사용 연수 기간 등을 고려하여 체계적인 관리를 수행하는 것을 의미한다(Lee et al., 2020). 국내에서도 시설물의 노후화로 인한 사고를 미연에 방지하고 사회적 비용 절감과 효율적인 장수명화를 위한 예방적 유지관리의 필요성이 대두되고 있다. 노후 시설물의 유지관리 중요성이 높아지면서 드론, 인공지능, 사물 인터넷 등의 4차 산업혁명 기술을 적용한 첨단 점검 장비의 도입과 개발이 활발하게 이뤄지고 있다(Hong et al., 2020).
현재 시설물의 외관조사는 인력에 의한 육안조사 방식으로 수행되고 있으며, 점검자의 숙련도, 경험도, 주관적인 판단에 따라 점검 결과에서 차이가 발생한다. 현장에서 수기로 작성한 외관조사망도의 문서 데이터로는 이력 관리가 불가능하다(Yoon and Lee, 2008). 이러한 한계를 극복하기 위해 첨단 점검 장비가 요구되며, 개발을 위한 특허, 논문, 연구 등이 지속적으로 증가하는 추세를 보이고 있다. 컴퓨터 비전(Computer vision)의 알고리즘 발달로 영상인식 기반의 스캐닝 장비를 활용한 점검 및 진단 방법이 각광받고 있다(Montero et al., 2015). 시설물 노후화의 정도나 구조적 안전성을 정확하게 파악하기 위해서는 점검 장비의 측정 신뢰성이 무엇보다 중요하다 할 수 있다. 하지만 현장 적용에 있어서 실질적인 효과를 발휘한다고 보기에는 어려운 실정이다. 콘크리트 구조물의 경우, 균열 폭 0.1 mm 단위의 매우 높은 정밀도와 정확도가 요구되는 경우에는 측정 결과의 신뢰성에 문제가 제기되고 있다(Bae et al., 2021).
최근 국내에서는 건설신기술(Construction New Technology, CNT)로 영역스캔(Area scan) 카메라 기반의 터널 스캐닝 시스템 3건이 등록되었다. 개발된 장비는 KMTL (CNT 887, 2020), Deep Inspection (CNT 898, 2020), MTEC (CNT 935, 2022)이며, 성능 지표로는 10~50 km/h의 주행속도에서 분해능 0.1~0.5 mm/pix의 이미지 취득 가능함을 제시하였고 자체 실험을 통해 검증하였다. 국내의 터널 스캐닝 시스템은 컴퓨터 비전 알고리즘을 활용하여 취득한 이미지로부터 균열 폭 0.2 mm 미만에 대한 위치 탐지와 정량적인 수치의 검출 가능성을 제시하고 있다. 하지만 국내에서는 이미지의 품질과 장비의 성능을 객관적으로 검증할 수 있는 제도나 절차는 존재하지 않는다. 개발된 각각의 터널 스캐닝 시스템에 대하여 객관적인 성능을 비교하는 것에는 한계가 있다.
일본에서는 개발된 첨단 점검 장비를 신기술 등록 제도인 NETIS (New Technology Information System)를 통해 관리하고 있다. NETIS에는 터널 스캐닝 시스템이 총 5건 등록되어 있다. 영역스캔 카메라를 활용한 장비는 MIMM-R과 Tunnel Tracer이고, 라인스캔(Line scan) 카메라를 활용한 장비는 3건(MMSD II, TC-3 및 eQ Doctor T)이 등록되어 있다. 일본의 터널 스캐닝 시스템의 성능 목표도 국내와 유사하게 주행속도 20~80 km/h에서 0.25~1.5 mm/pix의 이미지를 취득하고, 자체 개발한 소프트웨어를 통해 균열 폭 0.2~0.3 mm 미만을 검출하는 것을 장비의 성능 목표로 제시하고 있다(NETIS, 2023). 일본은 시설물 유지관리를 위해 개발된 점검 장비에 대한 성능평가 제도를 국가적으로 운용하고 있는 유일한 나라이다(Hong et al., 2020). 이에 맞추어 일본 국토교통성은 NETIS에 등록된 터널 스캐닝 시스템에 대하여 점검 지원 기술 성능 카탈로그에 제시되는 표준시험방법을 통해 객관적인 장비의 성능을 평가하고 있다.
본 논문에서는 일본의 점검 지원 기술 성능 카탈로그의 표준시험방법에 의한 터널 스캐닝 시스템의 성능을 조사하고, 국내의 터널 스캐닝 시스템과 비교 분석을 통해 향후 터널 스캐닝 시스템의 개발을 위한 시사점을 도출하고자 한다. 일본의 NETIS에 등록된 터널 스캐닝 시스템의 제원과 사후 평가에 대하여 조사하였다. 그리고 점검 지원 기술 성능 카탈로그에 대한 조사와 함께 일본 터널 스캐닝 시스템에 적용한 표준시험 결과를 통해 장비 성능을 분석하였다. 분석 결과를 기반으로 국내 터널 스캐닝 시스템에 대하여 간접적으로 성능을 추정하기 위해 카메라의 제원을 비교 분석하고 향후 개발에 필요한 시사점을 도출하였다.
2. 일본의 성능평가 제도
2.1 공공공사 신기술 활용 시스템(NETIS)
일본의 NETIS는 공공공사에서 신기술의 활용, 검토와 사후관리를 효율화하고, 리스크를 경감하여 유용한 신기술을 적극적으로 활용할 수 있도록 지원하는 체계이다. 이 체계는 일본의 공공공사에서 신기술을 활용함으로써 민간기업의 기술개발을 촉진하여 기술의 고도화에 목적이 있다. 민간기업이 개발한 신기술이 빠르고 지속적으로 공공공사 도입될 수 있도록 유도함으로써 국토교통성 산하의 공공공사에서는 NETIS 신기술의 활용 실적이 증가하고 있다. 신기술에 대하여 활용효과조사와 사후평가를 통해 각 장비의 활용 성적을 비교 평가하고, 기술 개선이 필요한 부분을 파악할 수 있도록 정보를 제공하고 있다. 사후평가에 따라 ‘유용한 신기술’로 평가되면 추천기술, 준추천기술, 평가촉진기술, 활용촉진기술로 분류되며 기술의 활용도에 따라 인센티브를 받고 있다. 특히 활용효과조사와 사후평가에서 수행된 현장 실험 데이터를 공개하여 발주처, 점검진단업체, 개발자 등 모두에게 활용될 수 있도록 데이터베이스화하고 있다(RICON, 2021).
NETIS 신기술의 사후평가는 시험실증평가와 활용효과평가로 구성된다. 시험실증평가는 신청 기술의 성립성과 정보의 타당성을 확인하고 평가하는 것이며, 활용효과평가는 기술의 활용 효과를 종합적으로 판단하는 것이다. 시험실증평가에서 터널 스캐닝 시스템의 성능을 파악하기 위한 방법은 균열 폭 0.3~3.0 mm의 판독가능률을 비교하는 것이다. 시험실증평가는 2가지 방법으로 수행된다. 방법 1은 근접 육안으로 검출 가능한 균열 중, 점검 장비로 취득한 이미지에서 검출할 수 있는 균열 개수에 근접 육안으로 검출한 균열 개수를 비교하여 나타내는 것이다. 방법 2는 취득한 이미지로부터 0.3 mm 이상 3.0 mmm 미만의 균열 위치와 폭을 수치로 표시하고 실제 현장에서 기술자가 육안으로 확인하여 이를 판독률로 나타내는 것이다(NETIS, 2023).
Table 1은 NETIS에 등록된 5건의 터널 스캐닝 시스템 중 3건에 대하여 수행된 시험실증평가 방법 1과 2의 균열 검출 결과를 보여주고 있다. 시험실증평가의 방법 1과 2에 적용된 3개의 장비, MIMM-R, MMSD II 및 TC-3는 평균 40 km/h 속도로 주행하였다. 방법 1은 0.3~3.0 mm 균열 폭을 갖는 84개 공시체에 대한 균열 판독률로, MIMM-R은 100%이고 MMSD II는 96%, TC-3은 98%로 나타났다. 방법 2에서 0.3~3.0 mm 균열 폭의 61개 공시체를 대상으로 MIMM-R은 49개를 검출하여 80% 판독률을 보인 반면에 MMSD II는 100%, TC-3은 95%로 나타났다(NETIS, 2023). MIMM-R이 방법 2에서 판독율 80%를 보인 이유로는 영역스캔 카메라의 특성상 빠른 이동 시 촬영한 이미지에 모션블러(Motion blur)가 발생하여 취득한 이미지에서 균열 폭 및 수치에 대하여 판독이 안된 것으로 추정할 수 있다. 반면에 라인스캔 카메라는 영역스캔 카메라보다 고속 이동 촬영에 유리하지만 차량의 정속 주행이 요구되며, 속도 변화 시 이미지의 정합 오류가 발생할 수 있다. MMSD II와 TC-3는 방법 1에서 MIMM-R 보다 낮은 판독률을 나타낸 것으로 분석할 수 있다. NETIS의 시험실증평가의 단편적인 시험 결과를 통해 각 장비의 객관적인 성능을 비교하기에는 한계가 있는 것으로 판단된다.
Table 1.
Results of crack detecting rate of tunnel scanning systems
2.2 점검 지원 기술 성능 카탈로그
일본의 「점검 지원 기술 성능 카탈로그」는 국토교통성 도로국에서 터널과 교량의 정기점검을 위한 첨단 신기술을 활용하고자 2019년부터 실시하고 있다. 이것은 점검 지원 기술을 활용하여 도로 시설물에 효율적인 정기점검이 가능하도록 정기점검 요령의 개정과 점검에 활용 가능한 기술의 성능을 정리한 것이다. 2019년에 16개 기술로 시작하여 2022년까지 217개의 기술이 성능 카탈로그에 게재되어 있다. 성능 카탈로그의 대상시설물은 교량과 터널로 한정되어 있으며, 이미지 측정 기술, 비파괴 기술, 계측·모니터링 기술로 각각 분류하고, 공통 기술로는 데이터 수집 및 통신 기술 등 총 7개의 기술 카탈로그로 구성되어 있다. 성능 카탈로그에는 각각의 개발 또는 공급업체에서 기술의 사양과 성능을 표시하고 있다. 이를 통해 유지관리 관리자나 점검 기술자에게 점검 장비의 선정을 위한 작동 원리나 적용 조건, 오차 특성 등의 정보를 제공하여 선택할 수 있도록 지원하고 있다(MLIT, 2023).
점검 기술이나 장비 등의 사양과 성능에 대하여 객관적으로 비교가 가능하도록 일본 국토교통성에서는 표준항목을 지정하고 있다. 표준항목은 동일하고 한정적인 조건에서 재현성이 가능한 시험인 표준시험과 실 구조물에서 수행된 현장시험으로 구분하고 있다. 표준항목에 따른 시험 결과는 정부차원에서 장비에 대한 보증이나 인증을 위한 것 아니다. 장비의 성능과 오차 특성 등의 특징에 대하여 공개한 제원 성능과 비교할 수 있도록 객관적인 시험 결과 데이터를 제공하는 제도로 볼 수 있다. 성능 카탈로그에서 대상으로 하고 있는 표준항목은 사용성이나 점검자의 정성적인 판단이 필요한 부분이 아니라 점검 장비의 객관성, 정량성, 재현성 등의 관점에서 제시되고 있다. 점검자의 숙련도와 경험적인 판단에 근거한 기술인 AI 자동화 기술과 정량적 평가 및 표준시험에서 수행하기 어려운 기술 등은 성능 카탈로그에서 다루고 있지 않다(MLIT, 2023).
본 논문에서는 성능 카탈로그에서 터널을 대상으로 이미지 측정 기술을 수행한 터널 스캐닝 시스템의 성능과 오차 특성을 조사하고 국내의 장비와 비교 분석하고자 한다.
3. 터널 스캐닝 시스템의 성능 비교 분석
3.1 성능 카탈로그 표준시험 방법
일본의 점검 지원 기술 성능 카탈로그에서는 터널에 대한 이미지 측정 기술의 표준항목과 시험 방법을 Table 2와 같이 제안하고 있다. 표준항목은 균열 폭, 오염된 상태의 균열 폭, 그을음으로 매워진 균열 폭, 균열 마킹, 균열 깊이, 길이 측정 정확도, 위치 정확도와 색상 식별 성능으로 총 8개 항목이다. 이에 대한 시험 방법과 함께 공시체와 차트를 제시하고 있다(MLIT, 2023).
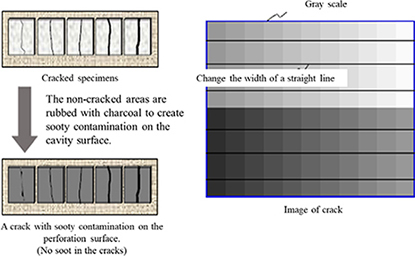
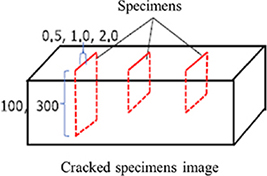
표준항목에서 균열 폭을 평가하는 방법은 최소 균열 폭과 측정 정확도로 구분하여 작성하도록 제시하고 있다. 예를 들어, 최소 균열 폭 0.2 mm를 이미지에서 육안으로 식별이 가능할 경우 0.2 mm로 표기한다. 측정 정확도의 경우 균열 폭 0.2 mm를 여러 차례 촬영하여 측정한 결과로부터 참값의 오차를 평균 제곱근 오차로 표기하여 작성한다. 실제 터널의 오염도를 모사하여 균열 폭을 측정하기 위한 표준항목도 제시되고 있다. 공시체에 숯 등으로 문질러 오염 상태를 인위적으로 만든다. 균열 이외의 주위 부분이 오염 될 경우와 균열 부위가 오염 될 경우를 구분하여 균열 폭 측정을 수행한다. 균열 폭 깊이의 표준항목은 콘크리트 공시체 내부에 균열을 본뜬 직사각형 모양의 염화 비닐판을 매립하여 균열을 만든다. 염화비닐판의 폭은 0.5 mm, 1.0 mm, 2.0 mm의 3종류로 구분하고, 깊이는 100 mm, 300 mm의 2종류로 제작하여 균열 폭 및 깊이를 측정하는 방법이다.
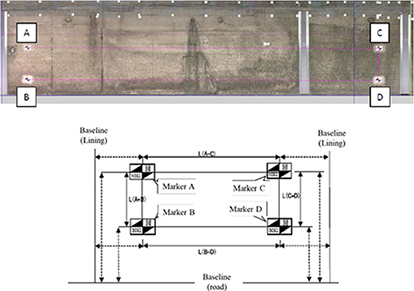
표준항목의 길이 측정 정확도는 터널 벽면의 4개 지점에 마커를 부착하고 이미지에서 종단과 횡단 방향의 거리를 측정한 것이다. 주행 촬영 시 이미지의 공백 및 왜곡에 의한 이미지 정합 오차를 파악하기 위함이다. 표준항목의 위치 정확도는 촬영된 이미지에서 부착된 4개 지점의 마커간 거리와 설치 장소를 실측 값과의 오차를 산출하여 검증하는 것이다. 이미지상 마커의 위치에 대하여 실측 값과의 차이를 분석하기 위한 것이다. 균열 마킹과 색상 식별 성능은 조명 장치로부터 낮거나 높은 휘도 차이로 인해 이미지에 노이즈를 발생시키는 원인과 카메라 촬영을 위해 필요한 조명의 영향을 파악하기 위한 평가 항목이다(MLIT, 2023).
일본에서 개발한 터널 스캐닝 시스템들은 라인스캔 또는 영역스캔 카메라를 활용하여 개발되었다. 각 카메라의 종류에 따라 다른 이미지 성능을 갖고 있으므로 같은 터널 환경에서 표준항목에 의한 결과를 비교할 경우, 각 장비의 객관적인 성능을 평가할 수 있다.
Table 2.
Standard test method for image measurement in tunnel



3.2 성능 비교 분석
일본 NETIS에 등록된 5건의 터널 스캐닝 시스템 중 Table 2의 점검 지원 기술 성능 카탈로그의 표준 시험 방법에 따라 수행된 장비는 4건이며 MIMM-R, Tunnel Tracer, MMSD II와 TC-3이다. 8개의 표준 항목 중 균열 폭, 길이 측정 정확도, 위치 정확도와 색 식별 성능인 총 4개 항목에 대하여 공통적으로 수행되었고, 시험 결과를 Table 3과 같이 정리하였다. MIMM-R과 Tunnel Tracer는 영역스캔 카메라, MMSD II와 TC-3는 라인스캔 카메라를 활용한 장비이다. 영상인식 기반의 터널 스캐닝 시스템의 핵심 장치는 카메라이며, 카메라의 종류와 성능에 따라 장비의 성능 또한 다를 것으로 예상된다. 카메라의 종류와 제원을 구분하여 터널 스캐닝 시스템의 성능을 비교 분석하였다.
Table 3.
Results of standard test method for image measurement in tunnel
최소 균열 폭 측정 결과, 4K 또는 8K 해상도의 라인스캔 카메라에서는 0.1 mm 균열 폭 식별이 가능하였다. 반면에 2K 또는 4K 영역스캔 카메라는 0.2 mm 균열 폭까지 식별이 가능한 것으로 분석되었다. 카메라의 종류에 따라 차이가 발생하였음을 확인하였다. 균열 폭 식별은 이미지상에서 육안으로 검출한 것을 의미한다. 균열 폭 측정 정확도는 균열 폭의 측정 결과에 대한 참값의 평균 제곱근 오차로 나타낸 것이다. 라인스캔 카메라는 해상도 차이 없이 균열 폭 0.1 mm에 대하여 0.2~0.22 mm의 오차가 있는 것으로 나타났다. 영역스캔 카메라에서는 균열 폭 0.2 mm에 대하여 0.43~0.46 mm의 오차가 발생한 것을 확인하였다. 이미지 분해능이 1~1.5 mm/pix로 촬영한 이미지상에서 0.1~0.2 mm 균열 폭이 육안으로 식별이 가능하지만, 이미지상에서는 균열 폭이 0.2~0.4 mm로 검출되는 것으로 평가할 수 있다. 균열 폭 측정은 이미지의 분해능과 연관 있으며 각 장비의 이미지 분해능이 Table 1에서 나타낸 성능으로 고려할 때, 고속 주행으로 촬영한 이미지의 품질은 영역스캔 카메라보다 라인스캔 카메라가 우수한 것으로 판단된다.
길이 측정 정확도에서 MMSD II (8K 라인스캔 카메라)는 0.67 %, TC-3 (4K 라인스캔 카메라)은 0.98 %의 평균 오차가 있으며, MIMM-R (2K 영역스캔 카메라)은 1.23 %, Tunnel Tracer (4K 영역스캔 카메라)는 1.26 %의 오차가 나타났다. 해당 결과로 라인스캔 카메라는 영역스캔 카메라보다 더 높은 정확도를 나타내고 있다. 위치 정확도의 경우 MIMM-R은 종단 방향 59.0 mm, 횡단 방향 19.7 mm 오차가 있고 Tunnel Tracer는 종단 방향 11.5 mm, 횡단 방향 38.5 mm의 오차가 발생하였다. 영역스캔 카메라는 종단 방향과 횡단 방향의 오차가 일정하지 않고 이미지가 종단 방향 또는 횡단 방향으로 치우친 결과가 나타났다. MMSD II는 종단 방향 13.3 mm, 횡단 방향 17.5 mm 오차가 있고 TC-3는 종단 방향 20.0 mm, 횡단 방향 18.0 mm의 오차가 발생하였다. 라인스캔 카메라는 진행방향과 둘레방향의 오차가 5 mm 이내의 균등한 차이가 있는 것으로 볼 때, 고속 촬영으로 인한 이미지 정합 시 왜곡 또는 공백에 따른 오차가 영역스캔 카메라보다 작은 것으로 판단된다. 색상 식별 성능은 카메라 이미지 센서의 컬러 또는 모노(Mono)의 식별 가능 여부이며, MMSD II는 카메라의 이미지 센서가 모노라서 컬러의 식별은 불가능하였다.
영역스캔 카메라의 경우 2K와 4K 해상도에 따른 표준 시험 결과에서 뚜렷한 차이는 나타나지 않았다. 하지만 동일한 4K 해상도의 라인스캔 카메라와 영역스캔 카메라에 대한 결과를 비교하면 라인스캔 카메라가 보다 더 우수한 결과를 나타낸 것으로 분석되었다.
라인스캔 카메라를 활용한 장비에서 8K 해상도의 경우 길이 측정 정확도와 위치 정확도에서의 오차는 4K 해상도의 카메라보다 개선된 결과를 나타내었다. 8K 해상도의 장비인 MMSD II는 60 km/h로 촬영하였고 4K 해상도의 TC-3는 40 km/h의 속도로 촬영하였기 때문에 촬영 주행속도에서 차이가 있다. 주행속도 차이를 고려하여도 표준항목 시험 결과에서 8K 해상도의 장비인 MMSD II가 4K 해상도의 TC-3보다 오차가 작고 이미지의 품질이 더 높은 것으로 판단된다.
터널 스캐닝 시스템은 카메라의 성능에 따라 이미지 품질에 차이를 보여주고 있다. 국내에서 개발된 터널 스캐닝 시스템을 일본의 점검 지원 기술 성능 카탈로그의 표준 시험방법에 따라 직접 수행한 결과가 없으므로 카메라 제원을 비교하여 터널 스캐닝 시스템의 성능을 간접적으로 평가하였다. Table 4는 일본과 국내의 터널 스캐닝 시스템의 카메라 제원을 정리한 것이다. 카메라 종류, 해상도, FPS (Frame Per Second), 셔터속도(Shutter speed), 컬러 여부와 개발 연도로 구분하였다. 일본의 MIMM-R은 2008년에 38만 화소의 카메라를 탑재하여 최초 개발되었으며, 2013년에 2K 해상도의 영역스캔 카메라로 업그레이드를 진행하였다. 국내의 KMTL과 유사한 2K 해상도에서 FPS (Frame per second)와 셔터속도에서 차이가 있지만 카메라 해상도를 기준으로 Table 3의 결과와 비교하여 간접적으로 추정하였다. 국내의 Deep Inspection과 MTEC의 4K 영역스캔 카메라와 유사한 성능을 갖는 장비는 일본의 Tunnel Tracer이다. Table 3의 균열 폭 측정 결과에서 최소 균열 폭 0.2 mm까지 식별은 가능하다고 제시되었지만 실제로 촬영한 이미지에서는 균열 폭이 약 0.46 mm로 검출되었다. 장비의 조명 영향과 운용 노하우 등에서 차이가 있을 수 있지만, 국내의 터널 스캐닝 시스템은 비슷한 성능의 카메라를 장착한 일본의 장비에서 취득한 이미지와 유사한 품질을 갖을 것으로 예상할 수 있다.
Table 4.
Comparison of camera spec in tunnel scanning systems
일본은 2017년도에 8K 라인스캔 카메라를 탑재한 터널 스캐닝 시스템 MMSD II를 개발하였다. 국내에는 아직 8K 해상도의 영역스캔 또는 라인스캔 카메라를 활용한 터널 스캐닝 시스템은 개발되지 않았다. 터널 스캐닝 시스템은 카메라의 성능에 따라 달라지며, 이미지 기반의 터널 스캐닝 시스템 개발을 위해서는 카메라의 선정이 매우 중요하다 할 수 있다. 향후 카메라 기반의 터널 스캐닝 시스템 성능 목표를 80 km/h 주행속도에서 0.3 mm/pix의 분해능을 갖는 고품질의 이미지 취득하기 위해서는 8K 이상의 고해상도 카메라를 활용하는 방안에 대하여 검토가 필요할 것으로 판단된다.
4. 고찰 및 개발방향
일본의 점검 지원 기술 성능 카탈로그의 표준항목 중 균열 폭 측정 정확도의 경우 영역스캔 카메라로 촬영한 분해능 1.5 mm/pix의 이미지에서 육안으로 식별 가능한 최소 균열 폭이 0.2 mm로 제안되었지만 이미지에서 실제 균열 폭을 측정했을 경우 약 0.4 mm로 나타났다. 라인스캔 카메라의 경우 분해능 1.0 mm/pix의 이미지에서 균열 폭 0.1 mm가 육안 식별이 가능하다고 제안되었지만 실제 균열 폭 검출 시 오차는 약 0.2 mm로 나타났다. 오차를 발생시킨 원인으로는 이미지의 분해능이 균열 폭보다 큰 경우와 이미지에서 모션블러가 발생하여 이미지의 선명도가 떨어진 경우로 추정할 수 있다.
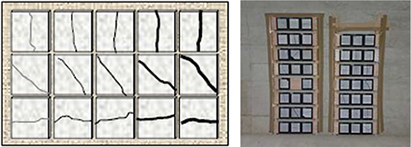
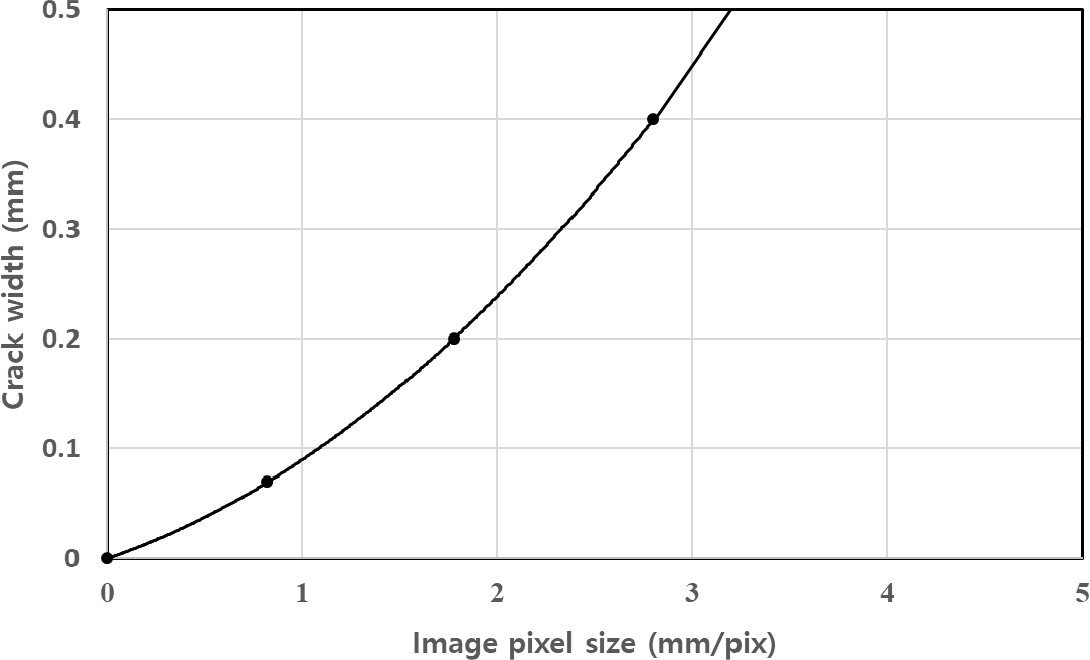
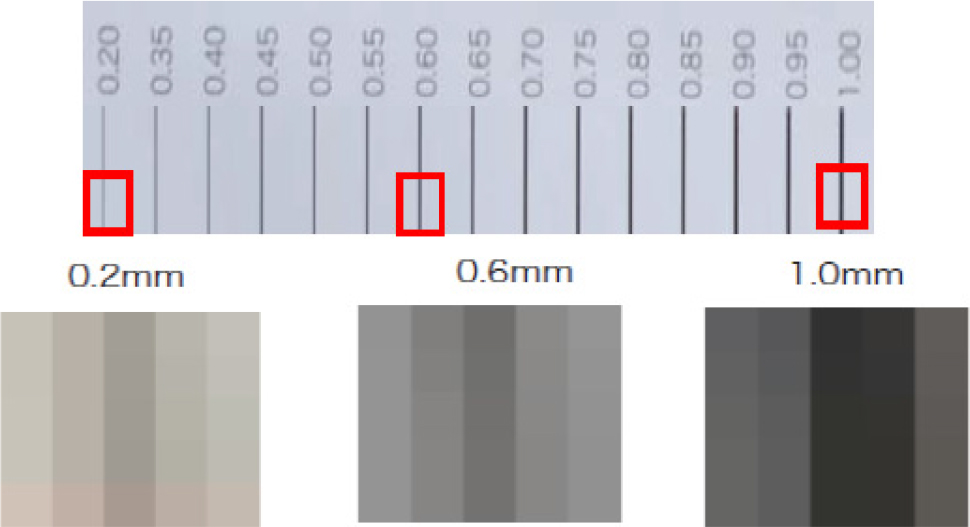
Fig. 1은 일본 콘크리트 공학회(Japan Concrete Institute, JCI)에서 제시한 이미지 분해능과 식별 가능한 균열 폭의 관계를 보여주고 있다(JCI, 2010). 1 mm/pix의 이미지에서 0.1 mm 균열 폭이 육안으로 식별 가능함을 보여주고 있다. Fig. 2는 균열 검출 소프트웨어를 활용하여 이미지상에서 균열 폭과 배경의 대한 그레이 스케일(Gray scale)의 차이 값(0~255) 변화를 통해 균열 폭을 검출하는 사례를 보여주고 있다(Nishimura et al., 2012). Wang et al. (2022)은 그레이 스케일의 변화를 활용한 균열 폭 검출 모델을 통해 1 mm/pix의 이미지에서 0.5 mm 균열 폭을 0.546 mm로 검출하여 9.2%의 오차율을 확인하였다. 하지만 이미지의 해상도, 명암, 조명 조도 등으로 그레이 색상이 변할 가능성이 높기 때문에 0.1 mm 단위의 정확도에서는 더 높은 오차가 발생할 것으로 판단된다.
최근에는 이러한 미세 균열 검출을 위해 딥러닝 기법이 사용되고 있다. 임계 값과 형태학적 연산자 방법(Ukai, 2007; Shen et al., 2015; Huang et al., 2017), Texture analysis의 Gabor Filter (Medina et al., 2017) 방법, 패턴 인식(Pattern Recognition) 방법 중 CNN (Convolutional Neural Networks)을 이용한 균열 검출 방법(Makantasis et al., 2015) 그리고 FCN (Fully Convolutional Network)에 의해 추출된 특징의 계층을 사용하여 균열의 의미론적 분할을 위한 이미지 인식 방법(Huang et al., 2018) 등 다양한 알고리즘이 활용되고 있다. 컴퓨터 비전에서는 많은 수의 이미지를 학습데이터로 가공하는 것이 중요하지만, 결과의 신뢰도는 이미지의 품질 수준에 따라 큰 차이 발생시킨다. 이미지로부터 0.2~0.3 mm의 균열을 검출하기 위해서는 이미지 분해능 또한 0.2~0.3 mm/pix의 동일한 수준으로 취득할 필요가 있다.
터널 스캐닝 시스템에서 취득한 이미지의 품질이 선명할수록 균열 검출 시 오차를 줄이고 높은 정확도의 결과를 도출할 수 있다. 이미지의 선명도에 영향을 미치는 모션블러는 빠르게 움직이는 물체를 느린 셔터 속도로 촬영할 경우 발생하는 잔상과 번짐효과이다. 모션블러를 줄이고 높은 품질의 이미지를 얻기 위해서는 카메라의 성능이 매우 중요하다. 일본의 터널 스캐닝 시스템은 영역스캔 카메라와 라인스캔 카메라를 각각 선정하여 개발하였다. Table 5는 카메라의 주요 기능과 차이를 나타낸 것이다. 라인스캔 카메라는 영역스캔 카메라보다 고속 촬영에 보다 유리한 장점이 있어서 성능 카탈로그의 길이 측정 정확도, 위치 정확도 등의 표준항목에서 영역스캔 카메라보다 낮은 오차율의 결과를 확인할 수 있었다. 그러나 라인스캔 카메라로 이미지를 취득하려면 관성 측정장치(Inertial measurement unit)를 활용하여 차량의 주행속도와 동기화를 해야하는 단점이 있다. 또한 선형 센서의 제한된 시야로 인해 원근 왜곡이 발생할 수 있으며, 영역스캔 카메라와 달리 고출력 조명이 필요하다(Attard et al., 2018). 반면에 영역스캔 카메라의 경우 라인스캔 카메라보다 장치의 설정과 인터페이스 등이 단순하다. 영역스캔 카메라의 경우 이미지의 노이즈 뿐 만 아니라 모션블러를 감소시키기 위해서는 롤링 셔터(Rolling shutter)보다는 글로벌 셔터(Global shutter)를 사용해야하며, 빠른 노출(Exposure) 성능을 확보해야 한다. 향후 개발될 터널 스캐닝 시스템의 성능 확보를 위해서는 카메라의 장단점을 고려할 필요가 있다고 판단된다.
Table 5.
Comparison with camera features
카메라의 선정만큼 조명 장치 또한 중요한 요소라고 할 수 있다. 광원은 흐릿한 이미지를 포착하기에 충분한 조명을 제공해야 하므로 터널과 같은 어두운 환경에서 활용되는 터널 스캐닝 시스템에서는 매우 중요하다. LED (Light Emitting Diode)는 고성능, 안정성, 고강도 및 비용 효율성을 제공할 수 있기 때문에 주로 사용되고 있다(Alidoost et al., 2022). 최대 100 km/h의 속도로 촬영하면서 이미지에 모션블러가 없도록 매우 짧은 셔터속도에서 이미지 센서에 충분한 휘도가 제공되어야 한다. 만일 휘도가 부족하면 이미지의 명암이 어두워지고 너무 높으면 이미지에 노이즈가 발생하여 이미지의 선명도가 떨어지는 문제가 발생할 수 있다. 플리커(Flicker) 현상을 최소화할 수 있는 조명의 선정도 중요하다 할 수 있다. 향후 터널 스캐닝 시스템 개발 시 카메라와 조명 장치와의 관계를 함께 고려할 필요가 있다.
5. 결 론
일본의 성능평가 제도인 NETIS의 사후평가와 점검 지원 기술 성능 카탈로그를 통해 터널 스캐닝 시스템의 성능 특성을 파악하였다. 이를 통해 향후 터널 스캐닝 시스템의 개선 사항과 개발 방향에 대한 시사점을 도출하였으며, 결론은 다음과 같다.
1. 일본의 NETIS 신기술은 사용자 중심으로 정부의 기술 인증이라는 의미보다는 많은 현장에서 사용할 수 있도록 지원하는 것에 주안점을 두고 있다. 다양한 터널 스캐닝 시스템에 대한 특징을 파악하고 객관적인 성능 평가를 위해 점검 지원 기술 성능 카탈로그에서 표준항목을 제시하고 있으며, 이를 수행한 결과를 기록하여 정보를 제공하고 있다. 제공된 정보로 일본의 터널 스캐닝 시스템의 성능과 오차 특성에 대하여 파악이 가능하였다. 국내에서도 시설물 점검 및 진단을 위해 첨단 장비 및 기술의 활용 사례가 증가하고 있다. 다양한 장비의 기술적 성능을 수요자 측면에서 객관적으로 비교 평가할 수 있는 제도 마련이 필요할 것으로 판단된다.
2. 일본의 터널 스캐닝 시스템은 분해능 1~1.5 mm/pix 이미지를 취득하여 영상처리 기법을 활용하여 0.1~0.2 mm의 균열 폭을 검출하였다. 그러나 오차가 0.2~0.4 mm가 발생하였고, 이미지의 품질에 따라 정확도가 떨어지는 한계가 있다. 영상처리 기법을 대체하여 영상인식 기반의 딥러닝 기술이 발달되고 다양한 연구를 통해 0.3 mm의 균열 검출을 위해서는 이미지의 분해능 또한 0.3 mm/pix가 요구되고 있다. 정밀한 분해능의 이미지 확보를 위해서는 8K 이상의 고해상도 카메라를 활용할 필요가 있다.
3. 고속으로 주행하면서 이미지를 촬영하기 위해서 영역스캔 카메라는 글로벌 셔터로 빠른 노출 성능 확보가 중요하며, 라인스캔 카메라는 적절한 라인레이트(Line rate)가 요구된다. 카메라의 빠른 노출 성능에 맞추어 조명의 휘도 또한 매우 중요한 요소이다. 향후 터널 스캐닝 시스템을 위한 카메라와 조명 선정을 위해서 실내에서 최대 주행속도 100 km/h에서 사진 촬영이 가능하도록 실내 환경을 조성하여 다양한 카메라와 조명의 성능을 테스트할 필요가 있다고 판단된다.
