

1. 서 론
운영 중 해저 터널의 안정성 평가에 다양한 계측정보를 사용해서 역해석을 수행하면, 효율적인 오차율 이내의 결과를 획득할 수 있다(An et al., 2016a, 2016b). 하지만, 운영 중 해저 터널의 실시간(real-time)에 가까운 평가를 위해서는 해석시간이 너무 많이 소요되어 무리가 따른다. 운영 중 해저 터널의 안정성 평가에 있어서 가장 중요한 점은 다양한 계측을 통한 터널 및 주변 지반의 변화를 감지 시, 실시간에 가깝게 빠른 시간 내에 평가가 이루어져야 한다는 것이다.
이에 본 연구에서는 상대적으로 해석시간이 짧게 소요되는 빔-스프링(beam-spring) 모델 기반의 FEM 솔버(solver)를 Python 언어로 개발하고, 선행연구를 통해서 구축된 차분진화 알고리즘과 결합하여, 실시간에 가까운 운영 중 해저 터널의 안정성 평가에 대한 적용성을 분석하였다.
Koyama (2003)는 쉴드터널의 구조설계 및 시공방법 사이의 균형 잡힌 발전(well-balanced progress)을 제공하기 위해서 설계 기술의 개선을 제안하였다. 일본 내 쉴드터널 현장의 설계 및 시공 상의 개선점 등에 관한 현황을 제시하고, 세그먼트 라이닝의 특성을 고려한 빔-스프링 모델 개선의 필요성을 제안하였다. Ahmet (2010)은 TBM 터널 굴착 시 사용되는 프리캐스트 콘크리트 라이닝 설계를 위한 다양한 해석방법에 대해서 비교 및 분석하였다. 2D, 3D 빔-스프링법에 대한 비교를 통해서, 콘크리트 세그먼트의 기계적, 기하학적 특성이 라이닝의 구조적 거동에 큰 영향을 미친다고 제안하였다. Barpi et al. (2011)은 터널에 작용되는 다양한 파라미터 간 상호거동에 대한 연구를 수행하였다. 퍼지셋(Fuzzy set) 이론을 적용하여 파라미터 간 불확실성의 정도를 분석하고, 빔-스프링 모델에 적용하였다. Arnau and Molins (2012)는 세그먼트 라이닝의 구조적 특징은 인접한 세그먼트 링 간의 커플링 효과(coupling effects)에 있다고 제안하였으며, 문제 해결을 위해서 3D FEM 수치해석을 수행하였다. 2D FEM 해석과의 비교를 통해서 3차원 해석의 필요성을 제안하였다. Li et al. (2015)은 콘크리트 세그먼트 라이닝의 하중 단계 별 거동을 실험을 통해 고찰하고, 이러한 거동을 반영할 수 있는 해석 모델을 개발하였다. 세그먼트의 역학적 거동에 영향을 미치는 인자로 볼트의 선조임력(pre-tightening force), 볼트의 위치, 축방향 하중 및 가스켓 등으로 고려해서 개선된 모델(progressive model)을 제안하였다. Nikkhah et al. (2016)은 수로터널(Chashir tunnel)에 대한 수치해석을 통해서 세그먼트 라이닝의 구조해석 평가 시, 빔-스프링 모델을 포함한 다양한 방법에 대해서 비교하는 연구를 수행하였다.
쉴드터널 세그먼트 라이닝의 기계적, 기하하적 특성을 고려하기 위한 빔-스프링 모델의 개선에 대한 연구가 진행되었다. 일본전신전화(NTT)에서는 운영 중인 세그먼트 라이닝 터널의 균열에 대한 안정성 평가에 대한 연구를 수행하였다. NTT의 Kawabata et al. (2014)는 운영 중 해저 터널에 대한 새로운 평가 방법을 제안하였다. 세그먼트 콘크리트 라이닝의 시간에 따른 거동을 재현할 수 있는 해석 모델(beam- spring model)을 개발하였다. 개발된 해석 모델은 콘크리트 라이닝의 균열에 의한 불균일성을 표현한다.
Arnau et al. (2012)은 세그먼트 라이닝 터널의 종단방향 시간의존적 거동에 대해서 연구를 수행하였다. 이 연구에서 세그먼트 조인트 및 링 세그먼트 조인트의 영향을 고려하기 위해서 방사방향 지반반력계수의 1/3 수준의 강성을 갖는 지반반력계수를 조인트 위치에 고려하여 해석을 수행하였다.
본 연구의 목적은 계측데이터를 통한 역해석 수행의 결과로 운영 중 터널의 실시간에 가까운 안정성 평가에 있기 때문에, 상대적으로 간단한 형태의 빔-스프링 모델을 사용해도 무리가 없을 것으로 판단되며, 빔-스프링-II 모델(AFTES–WG7, 1993; JSCE, 1996) 수준의 해석용 솔버를 개발하였고, 선행 연구에서 기 구축되어 있는 차분진화 알고리즘과의 연계성에 더욱 더 주안점을 두고 연구를 진행하였다.
선행 연구에서는 운영 중 해저 터널의 안정성 평가를 위한 역해석 알고리즘을 개발하고 상용 프로그램(FLAC3D)으로 검토해서 그 가능성을 확인하였지만, 해석시간이 상대적으로 오래 걸리는 한계점이 있었다. 따라서 본 연구에서는 운영 중 해저 터널의 안정성 평가를 실시간에 가깝게 구현하기 위해서 선행 연구에서 구축된 변위-응력-강성열화(지반-라이닝) 기반의 차분진화 알고리즘에 대한 유지보수 및 수정작업에 용이하며 플랫폼에 독립적인 특징이 있는 Python 언어를 사용하여 모듈화 하였고, 동일 언어로 개발된 빔-스프링 모델과 연계하여 시스템을 구축하고 적용성을 검토하였다.
2. 빔-스프링 모델
빔-스프링법은 일반적으로 “지반반력계수에 의한 방법”이라고도 불리며, 라이닝은 일반적으로 호(arc)로 표현되지만 이 방법에서는 고정된 각도로 구성된 정다각형 형태로 단순화 되었다. 라이닝의 세그먼트는 지반반력을 표현하는 탄성스프링으로 지지된다. 즉, 라이닝과 지반은 각각 빔-스프링의 시리즈로 표현된다. 지반반력은 지반의 변형에 비례하는 라이닝의 변형에 의해서 생성된다. 이러한 가정을 통해서 세그먼트와 주변 지반 사이의 상호 거동을 고려할 수 있다(AFTES–WG7, 1993).
2.1 빔-스프링 모델 일반 사항
빔-스프링 모델은 TBM의 세그먼트 라이닝 부재력(member forces) 계산을 위한 가장 효과적이고 실용적인 도구이기 때문에, 여러 가지 이론적 접근 방법이 개발되어왔다. 빔-스프링 모델의 주요 결정 기준은 터널 라이닝과 주변 지반의 상호 작용 및 세그먼트 연결부의 조인트 부분의 처리이다. 라이닝과 주변 지반의 상호 거동을 고려하기 위해서는 일반적으로 인장력을 허용하지 않는 탄성스프링을 사용한다. 그러나 조인트 부분을 평가하는 방법은 다양하게 사용되고 있다. 따라서 빔-스프링 모델의 이론적 분류는 조인트 부분에 대한 평가 방법에 따라서 이루어질 수 있다.
2.2 구축된 빔-스프링 모델 개요
본 연구에서는 운영 중 해저 터널에서 계측 가능한 데이터를 활용하여 역해석 기법으로 안정성을 평가함에 그 목적이 있다. 여기서는 세그먼트 링으로 구성된 쉴드터널의 종단방향에 대한 빔-스프링 모델을 개발하였다.
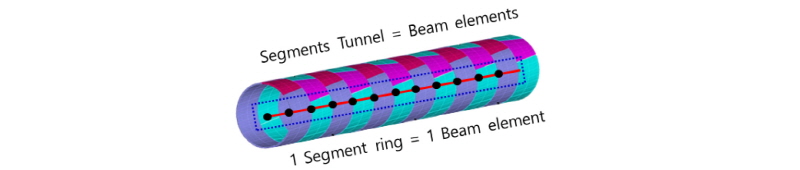
Fig. 1 에서는 구축된 모델의 개요를 보여주고 있다. 세그먼트 라이닝을 빔요소(beam elements)로 모사하고, 각각의 세그먼트 링을 한 개의 요소(element)로 구성하는 쉴드터널 종단방향 빔-스프링 모델을 구축하였다. Fig. 2(a)에서는 구조해석을 위한 빔-스프링 모델의 개발 흐름도를 보여주고 있다. 우선, 입력인자로 세그먼트 링의 개수(beam number), 하중조건 등을 입력할 수 있는 경계조건, 세그먼트 라이닝의 탄성계수(E), 단면 2차모멘트 그리고 세그먼트 링의 길이(L)를 고려하였다. 여기서 L은 한 개의 빔 요소의 길이와 동일하다. 전체 강성 행렬(global stiffness matrix)을 생성한 후, 역행렬(inverse matrix) 계산을 통해서 해석을 수행하도록 구성하였다. 이러한 기본적인 FEM 해석을 수행할 수 있는 구조를 선행적으로 구축하였고, 후술할 내용인 차분진화 알고리즘과의 연계 및 실제 계측 데이터 값을 입력받을 수 있도록 확장성을 부여하였다. 또한, Fig. 2(a)에서 보여주고 있는 이탤릭체 표기(bold and italic) 부분은 실제 계측 데이터 값들이 입력되는 위치를 의미한다.
Muir wood (1975)는 세그먼트 조인트의 효과를 고려할 수 있는 경험식을 제안하였다. 유효관성모멘트( )는 세그먼트의 개수에 따라서 식 (1)과 같이 표현된다.
)는 세그먼트의 개수에 따라서 식 (1)과 같이 표현된다.

 (1)
(1)
여기서,  는 세그먼트의 유효 관성모멘트,
는 세그먼트의 유효 관성모멘트,  는 세그먼트 조인트 사이에 힘 전이 구역(force transmission zone)에서의 관성모멘트,
는 세그먼트 조인트 사이에 힘 전이 구역(force transmission zone)에서의 관성모멘트,  는 라이닝 전체 단면에 대한 관성모멘트 그리고
는 라이닝 전체 단면에 대한 관성모멘트 그리고  은 세그먼트의 개수(Key 세그먼트는 제외)를 의미한다. Muir wood (1975)는 세그먼트 조인트가 4개 이하로 존재하는 경우에는 세그먼트 라이닝의 강성에 영향을 미치지 않는다고 제안하였다. 하지만, Muir wood의 모델은 라이닝 횡단 모델에 적용할 수 있는 세그먼트 조인트에 대한 공식이기 때문에 종단방향의 링 세그먼트 조인트를 고려해야하는 본 연구에서 적용하기가 어려운 단점이 있다. 그러한 이유로 본 연구에서는 링 세그먼트 라이닝 조인트 강성저하를 고려하기 위해서 라이닝의 휨강성(EI)에 저감계수(
은 세그먼트의 개수(Key 세그먼트는 제외)를 의미한다. Muir wood (1975)는 세그먼트 조인트가 4개 이하로 존재하는 경우에는 세그먼트 라이닝의 강성에 영향을 미치지 않는다고 제안하였다. 하지만, Muir wood의 모델은 라이닝 횡단 모델에 적용할 수 있는 세그먼트 조인트에 대한 공식이기 때문에 종단방향의 링 세그먼트 조인트를 고려해야하는 본 연구에서 적용하기가 어려운 단점이 있다. 그러한 이유로 본 연구에서는 링 세그먼트 라이닝 조인트 강성저하를 고려하기 위해서 라이닝의 휨강성(EI)에 저감계수( )를 적용할 수 있도록 제안하였다. 실물 모형실험 등을 통해서 값을 구할 수 있는 한계점을 내포하고 있지만, 링 세그먼트 조인트에 의한 강성 저하를 고려할 수 있도록 0~1 사이의 값을 갖는 저감계수(
)를 적용할 수 있도록 제안하였다. 실물 모형실험 등을 통해서 값을 구할 수 있는 한계점을 내포하고 있지만, 링 세그먼트 조인트에 의한 강성 저하를 고려할 수 있도록 0~1 사이의 값을 갖는 저감계수( )를 입력할 수 있도록 하였고, 본 연구에서는
)를 입력할 수 있도록 하였고, 본 연구에서는  를 적용하였다. 터널 횡단면의 방사방향에 대한 지반반력계수(Radial stiffness,
를 적용하였다. 터널 횡단면의 방사방향에 대한 지반반력계수(Radial stiffness, )는 Table 1
에서와 같이 다양한 공식이 사용되고 있다. 이러한 공식들은 탄성계수(E), 포아송비(ν), 터널반경(R) 등으로 표현된다. 본 연구를 통해서 개발된 프로그램에서는 Table 1에서 기술한 3가지 공식으로 지반반력계수를 산정할 수 있도록 하였고, 또한, 사용자가 지반반력계수를 직접 입력할 수 있도록 구성하였다. 쉴드터널 시공 시 발견된 연약한 지반에 대해서 보강(그라우팅)이 된 지반(중점관리구간)의 지반강성저하에 대한 계측정보를 획득할 수 있다는 가정(Kim et al., 2016)을 적용하여 본 연구에서는 지반강성저하에 대한 저감계수(
)는 Table 1
에서와 같이 다양한 공식이 사용되고 있다. 이러한 공식들은 탄성계수(E), 포아송비(ν), 터널반경(R) 등으로 표현된다. 본 연구를 통해서 개발된 프로그램에서는 Table 1에서 기술한 3가지 공식으로 지반반력계수를 산정할 수 있도록 하였고, 또한, 사용자가 지반반력계수를 직접 입력할 수 있도록 구성하였다. 쉴드터널 시공 시 발견된 연약한 지반에 대해서 보강(그라우팅)이 된 지반(중점관리구간)의 지반강성저하에 대한 계측정보를 획득할 수 있다는 가정(Kim et al., 2016)을 적용하여 본 연구에서는 지반강성저하에 대한 저감계수( )를 적용할 수 있도록 구성하였다.
)를 적용할 수 있도록 구성하였다.
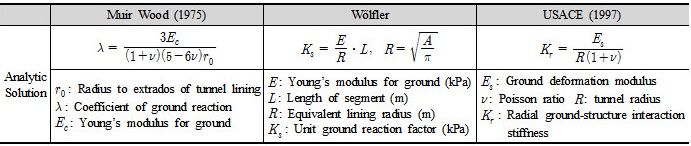
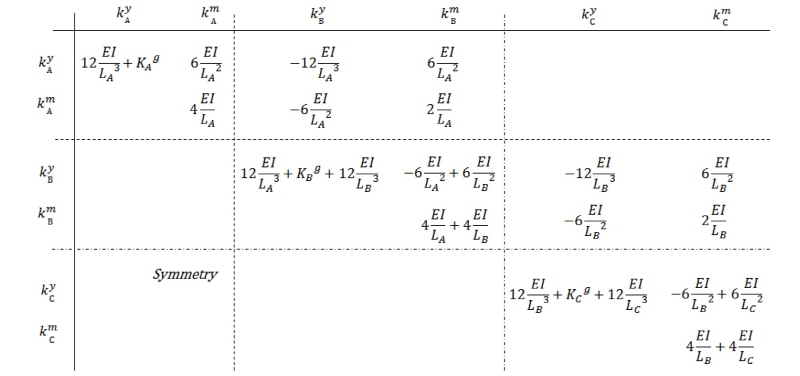
Fig. 3, Fig. 4에서는 시스템 방정식의 조합과정을 보여주고 있다. Fig. 3에서는 3개의 빔요소와 3개의 지반반력 스프링을 포함한 구조해석 모델의 시작부를 보여주고 있다. 시스템 강성행렬은 공동 절점에 대하여 인접한 각 요소가 기여하는 부분의 강성행렬을 합함으로써 Fig. 4와 같이 구할 수 있다. 동일한 방식으로 전체 모델의 하중벡터도 공동 절점의 반력과 모멘트를 합함으로써 획득이 가능하다

3. DEA 변수 정의 및 구성
본 연구는 선행 연구(An et al., 2016a, 2016b)에 대한 후속 연구로서 차분진화 알고리즘의 주요 단계(초기화, 돌연변이, 교배, 선택)는 선행 연구에서 자세하게 기술하였다. Storn and Price (1997)는 2차원 평면에서 차분진화 알고리즘의 진행과정을 식(2)~(4)로 표현하였다.
각각의 변화 대상 벡터  에 대해 집단에서 랜덤하게 선택된 서로 다른 3개의 벡터로부터 교배용 벡터를 식 (2)와 같이 생성한다. 여기서, NP는 집단의 크기이고, F는 돌연변이 상수로 0~2 사이의 값을 갖는다. 식 (3)은 교배단계에 대한 내용이다. 부모 벡터(parent vector)는 시행 벡터(trial vector)를 생성하기 위하여 돌연변이 벡터(mutant vector)와 교배된다. 여기서 rand는 변화에 사용될 벡터가 랜덤하게 선택됨을 의미하며, CR은 교배 상수로 0~1 사이의 값을 갖는다. Irand는 [1, 2, ..., D]의 무작위 정수(integer)이다.
에 대해 집단에서 랜덤하게 선택된 서로 다른 3개의 벡터로부터 교배용 벡터를 식 (2)와 같이 생성한다. 여기서, NP는 집단의 크기이고, F는 돌연변이 상수로 0~2 사이의 값을 갖는다. 식 (3)은 교배단계에 대한 내용이다. 부모 벡터(parent vector)는 시행 벡터(trial vector)를 생성하기 위하여 돌연변이 벡터(mutant vector)와 교배된다. 여기서 rand는 변화에 사용될 벡터가 랜덤하게 선택됨을 의미하며, CR은 교배 상수로 0~1 사이의 값을 갖는다. Irand는 [1, 2, ..., D]의 무작위 정수(integer)이다.
 (2)
(2)
 (3)
(3)
 (4)
(4)
식 (4)는 선택 단계에 대한 내용이다. 목표 벡터(target vector)  는 시행 벡터
는 시행 벡터  와 비교된다. 그리고 다음 세대에는 우수한 형질의 개체가 선택된다. 그러므로 각각의 시행 벡터는 부모 벡터와의 비교를 통해 다음 세대에는 우수한 유전 형질을 전달하게 된다. 이러한 과정을 거쳐 모집단에서 최고 우수한 개체들은 다음 세대에도 유지된다. 지정된 종료 기준 에 도달할 때까지 이러한 과정이 반복 수행된다. 식 (5)는 사용된 적합도 공식을 보여주고 있다.
와 비교된다. 그리고 다음 세대에는 우수한 형질의 개체가 선택된다. 그러므로 각각의 시행 벡터는 부모 벡터와의 비교를 통해 다음 세대에는 우수한 유전 형질을 전달하게 된다. 이러한 과정을 거쳐 모집단에서 최고 우수한 개체들은 다음 세대에도 유지된다. 지정된 종료 기준 에 도달할 때까지 이러한 과정이 반복 수행된다. 식 (5)는 사용된 적합도 공식을 보여주고 있다.
 (5)
(5)
여기서,  : 개발 프로그램 y방향 계산 변위
: 개발 프로그램 y방향 계산 변위
 : 현장 i 측정 지점 y 방향 계측 변위
: 현장 i 측정 지점 y 방향 계측 변위
 : 측정 지점의 총 수
: 측정 지점의 총 수
 :
: 
 :
: 
가정한 계측치 결과와 역해석을 통해 계산된 변위차이의 합으로 오차율을 계산하는 경우, 지점별 변위 경향을 고려하지 못하는 한계가 있다. 변위 차이의 합은 같더라도, 지점별 변위 경향이 다른 경우를 고려하지 못한다. 본 연구에서는 기존에 제안한 오차율 식(An et al., 2016a, 2016b)에 변위의 증분 경향을 고려할 수 있는 항목을 추가하여 식 (5)와 같이 적용하였다.
4. BS+DEA 기반의 운영 중 터널 안정성 평가를 위한 역해석 프로그램
4.1 개발 프로그램 개요
빔-스프링 모델의 계산 기능과 DEA를 이용한 역해석 기능은 Python 수학 라이브러리를 이용하여 구축하였다. Python에서 제공되는 많은 오픈 소스 라이브러리 기능을 조합하여 계산 기능을 개발할 수 있었다. 향후 운영 중 해저 터널의 횡단면 안정성 해석 프로그램의 개발 단계에서도 적용 가능하도록, 공통으로 사용되는 계산 모듈들을 개별 함수로 정의하여 개발하였다. DEA를 이용한 역해석에 사용되는 목적함수로 빔-스프링 모델을 사용하기 위해서, 입출력 과정을 최대한 단순화하였다.
Fig. 2에서는 빔-스프링 모델과 DEA를 연계하여 개발한 프로그램의 흐름도를 보여주고 있다. 선행연구(An et al., 2016a, 2016b)에서 구축한 차분진화 알고리즘(DEA)을 Python 언어를 사용하여 모듈화하고 동일 언어로 개발한 빔-스프링 모델을 연계하여 하나의 통합 프로그램으로 개발하였다. 목적함수(target function)은 본 연구에서 개발한 빔-스프링 모델을 의미한다. 목적함수를 사용해서 운영 중 해저 터널의 종단방향 정보로 정해석을 수행하고, 역해석이 필요한 상황에는 DEA 과정을 통해서 역해석이 수행 가능한 구조로 개발하였다.
4.2 수치 해석
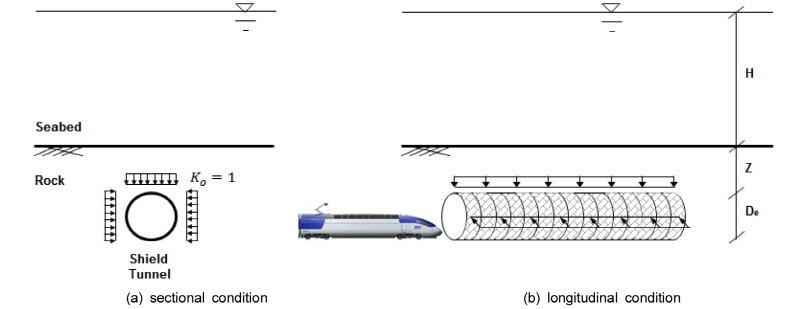
초장대, 고수압 조건의 해저터널을 모사하기 위해서, 쉴드터널 외경( ) 및 세그먼트 두께(t)는 Woo and Yoo (2015)의 논문을 참고하여, 9.1 m 및 0.3 m로 적용하였고, 해수면으로부터 1 km 아래 터널이 존재하는 것으로 가정하여 10 MPa의 등방압력이 작용하는 것으로 해석을 수행하였다. 또한, 가상 터널을 이상화하여
) 및 세그먼트 두께(t)는 Woo and Yoo (2015)의 논문을 참고하여, 9.1 m 및 0.3 m로 적용하였고, 해수면으로부터 1 km 아래 터널이 존재하는 것으로 가정하여 10 MPa의 등방압력이 작용하는 것으로 해석을 수행하였다. 또한, 가상 터널을 이상화하여  및 Fig. 5에 제시된 바와 같이 등방압력이 모델에 작용하는 것으로 간주하였고, H는 수심(m), z는 해저면으로부터 터널 상부까지의 거리(m)로 정의하였다. 대상 암반 및 콘크리트 세그먼트 라이닝에 대해서 탄성 모델을 사용하였다. 대상 암반에 대한 파라미터는 변형계수(
및 Fig. 5에 제시된 바와 같이 등방압력이 모델에 작용하는 것으로 간주하였고, H는 수심(m), z는 해저면으로부터 터널 상부까지의 거리(m)로 정의하였다. 대상 암반 및 콘크리트 세그먼트 라이닝에 대해서 탄성 모델을 사용하였다. 대상 암반에 대한 파라미터는 변형계수( ) 2.1 GPa, 포아송비(
) 2.1 GPa, 포아송비( ) 0.2를 적용하였다. 콘크리트 라이닝에 대해서는 변형계수(
) 0.2를 적용하였다. 콘크리트 라이닝에 대해서는 변형계수( ) 24 GPa, 포아송비(
) 24 GPa, 포아송비( ) 0.18을 가정하여 적용하였다. 2장에서 기술한 바와 같이, 본 연구에서는 세그먼트 라이닝을 빔 모델로 간주하였기 때문에 단면 2차모멘트는 식 (6)과 같이 계산할 수 있다.
) 0.18을 가정하여 적용하였다. 2장에서 기술한 바와 같이, 본 연구에서는 세그먼트 라이닝을 빔 모델로 간주하였기 때문에 단면 2차모멘트는 식 (6)과 같이 계산할 수 있다.
 (6)
(6)
여기서,  는 터널 외경(m),
는 터널 외경(m),  는 터널 내경(m)이다. 또한, 1개의 빔요소는 1 ring으로 간주하여 (L)로 적용하였으며, 여기서는 1.5 m로 가정하였다. 차분진화 알고리즘에 적용된 파라미터는 초기 무작위 개체군 수는 10~40, 돌연변이 상수는 0.8, 교배상수는 0.8, 최대 진화 반복횟수는 20~40 범위에서 적용하였다. 또한, 역해석에 의해 계산할 암반 물성 중 목표 값인 지반강성 저감계수(
는 터널 내경(m)이다. 또한, 1개의 빔요소는 1 ring으로 간주하여 (L)로 적용하였으며, 여기서는 1.5 m로 가정하였다. 차분진화 알고리즘에 적용된 파라미터는 초기 무작위 개체군 수는 10~40, 돌연변이 상수는 0.8, 교배상수는 0.8, 최대 진화 반복횟수는 20~40 범위에서 적용하였다. 또한, 역해석에 의해 계산할 암반 물성 중 목표 값인 지반강성 저감계수( )의 범위는 0.4≤
)의 범위는 0.4≤ ≤1.0으로 적용하였다.Table 1
에서는 수치해석에 사용한 물성치를 정리하였다.
≤1.0으로 적용하였다.Table 1
에서는 수치해석에 사용한 물성치를 정리하였다.
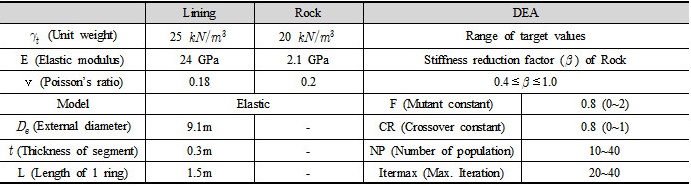
Fig. 6 및 Table 3에서는 수치해석 수행 케이스를 보여주고 있다. 쉴드터널 종단방향으로 11개의 세그먼트 링을 고려하였으며, 1.5 × 11 = 16.5 m를 대상으로 하여 해석을 수행하였다. Fig. 6(a)는 변위가 발생하지 않은 상태를 보여주고 있으며, Fig. 6(b)에서는 중앙에 위치한 1개의 링에서 변위가 발생하였을 경우에 대해서 가정하여 해석을 수행하였다. 여기서는 Table 1에서 기술한 3가지의 지반반력계수를 적용하였고, Fig. 7에서와 같이 지반강성계수 ( )에 터널의 외경 9.1 m를 고려하여, 단위폭당 1개의 지반스프링이 작용하는 것으로 가정하여 지반반력계수 값을
)에 터널의 외경 9.1 m를 고려하여, 단위폭당 1개의 지반스프링이 작용하는 것으로 가정하여 지반반력계수 값을  로 적용하였다. 3가지 지반반력계수에 의한 결과를 확인한 후, 1개의 지반반력계수를 선택하여 Case (c)에 적용하였다. 또한, 운영 중 해저터널에서 발생할 수 있는 미소변위 상태(약 3 mm)를 생성하기 위해서 6번째 링에만 추가적인 하중(10 + 5 MPa)을 가하여 해석을 수행하였다.
로 적용하였다. 3가지 지반반력계수에 의한 결과를 확인한 후, 1개의 지반반력계수를 선택하여 Case (c)에 적용하였다. 또한, 운영 중 해저터널에서 발생할 수 있는 미소변위 상태(약 3 mm)를 생성하기 위해서 6번째 링에만 추가적인 하중(10 + 5 MPa)을 가하여 해석을 수행하였다.

 (per unit width, 1 m)
(per unit width, 1 m)
Fig. 6(c)의 경우는 인접한 다수의 링에서 변위가 증가되면서 발생한 상황을 가정하였다. Fig. 6(c)의 케이스는 연약한 지반을 통과하는 운영 중 터널의 세그먼트 라이닝 변위 변화 양상을 통해 안정성 평가 가능성을 확인해보기 위한 해석조건을 가정하였다. Case (b) 해석 결과로부터 선택한 USACE (1997)에 의한 지반반력계수 공식을 사용하였고, 지반강성 저감계수( )에 대한 값을 1.0, 0.85, 0.7의 3개 케이스에 대해서 해석을 수행하여 강성 저항에 따른 경향을 분석하였다. Case (d)에서는 DEA를 사용하여 지반강성 저감계수(
)에 대한 값을 1.0, 0.85, 0.7의 3개 케이스에 대해서 해석을 수행하여 강성 저항에 따른 경향을 분석하였다. Case (d)에서는 DEA를 사용하여 지반강성 저감계수( ) 값에 대해서 Table 3에서 보는 바와 같이 세그먼트 별로 다르게 적용해서 역해석을 수행하였다.
) 값에 대해서 Table 3에서 보는 바와 같이 세그먼트 별로 다르게 적용해서 역해석을 수행하였다.
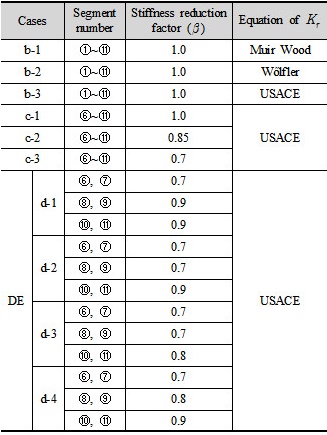
Table 3에 보여주고 있는 해석 Case (b-1~3)에서는 Fig. 6(b)와 같이 1개의 링에서 이상 변위가 발생한 경우로 가정하여, ( )에 대한 값은 0.5를 적용하였고, 3개의 지반반력계수에 대한 해석을 수행하였다. 해석 Case (c-1~3)에서는 Fig. 6(c)와 같이 절리면과 같은 연약대(weak zone)에 영향을 받는 인접한 다수의 링에서 이상 변위가 발생한 경우로 가정하였고, 가정한 지반강성 저감계수 (
)에 대한 값은 0.5를 적용하였고, 3개의 지반반력계수에 대한 해석을 수행하였다. 해석 Case (c-1~3)에서는 Fig. 6(c)와 같이 절리면과 같은 연약대(weak zone)에 영향을 받는 인접한 다수의 링에서 이상 변위가 발생한 경우로 가정하였고, 가정한 지반강성 저감계수 ( ) 값을 DEA 기반의 역해석을 수행하여 오차율을 검토하였다.
) 값을 DEA 기반의 역해석을 수행하여 오차율을 검토하였다.
4.3 수치 해석 결과
해석 Case (b)를 통해서는 서로 다른 3가지 종류의 지반반력계수 산정 공식을 적용하여 비교하였다. 본 연구에서는 3가지 공식을 통해서 비교한 값을 토대로 국내외에서 가장 많이 사용되고 있기도 하지만, 결과적으로 3가지 공식 중에 평균적인 값을 보인 USACE (1997) 공식을 후속 해석 케이스에 적용하였다. Muir Wood (1975) 공식은 USACE 공식 대비 77%, Wőlfler 공식은 USACE 대비 177% 정도의 지반반력계수가 산정되었다. Wőlfler 공식은 국내에서 많이 사용되고 있는 것으로 파악되지만, 분모에 포아송비( )가 없는 간략식이기 때문에 과다한 값이 산정되는 경향이 있어서 사용을 지양하는 것이 좋을 것으로 판단된다.
)가 없는 간략식이기 때문에 과다한 값이 산정되는 경향이 있어서 사용을 지양하는 것이 좋을 것으로 판단된다.
Fig. 8에서는 해석 Case (c)의 변위 양상을 보여주고 있다. 지반강성 저감계수( )의 감소에 영향을 받아 변위가 증가됨을 확인할 수 있다.
)의 감소에 영향을 받아 변위가 증가됨을 확인할 수 있다.

역해석에서 탐색하는 변수의 개수가 늘어날수록 개체수(NP, number of population)를 키워야 탐색이 원활하게 수행된다. 하지만 개체수(NP)를 너무 키우면 전체 해석 시간이 늘어나므로, 적절하게 개체수를 설정해야 한다. 본 연구에서 빔-스프링 모델에 적용한 지반강성 저감계수( )는 서로 의존성이 없기 때문에 NP를 20개 이상으로 늘려서 역해석을 수행하였다.
)는 서로 의존성이 없기 때문에 NP를 20개 이상으로 늘려서 역해석을 수행하였다.
운영 중 해저 터널이 Fig. 6(c)와 같이 중점적으로 관리해야하는 연약대(보강지반)의 영향을 받는다고 가정하고, 빔-스프링 모델에서 일부 빔요소의 지반강성계수( )를 열화시켜 해석을 수행하였다. 정해석 결과를 계측값이라고 가정하고, 역해석을 통해 열화정도를 탐색하였다.
)를 열화시켜 해석을 수행하였다. 정해석 결과를 계측값이라고 가정하고, 역해석을 통해 열화정도를 탐색하였다.
지반 강성의 열화 정도를 초기 값 대비 10%, 20%, 30%로 고려(An et al., 2016b)하여 해석을 수행하였고, Table 4에 결과를 정리하였다.
본 연구에서 역해석 대상인 지반강성 저감계수( )의 개수를 2개로 적용하여 탐색하는 경우, 개체수(NP)를 기존 10개에서 20개로 증가시켜서 탐색을 수행하였다. 이 경우에는 역해석 iteration 14번째 단계에서 오차율 이내에
)의 개수를 2개로 적용하여 탐색하는 경우, 개체수(NP)를 기존 10개에서 20개로 증가시켜서 탐색을 수행하였다. 이 경우에는 역해석 iteration 14번째 단계에서 오차율 이내에  값을 찾을 수 있었다.
값을 찾을 수 있었다.
 를 3개로 적용하여 탐색하는 경우, NP가 20개인 경우 수렴시간이 상대적으로 오래 걸리는 결과가 나옴으로 인해서 NP를 40개로 증가시켜 해석을 수행하였다. 역해석 iteration 16번째에서 오차율 이내에
를 3개로 적용하여 탐색하는 경우, NP가 20개인 경우 수렴시간이 상대적으로 오래 걸리는 결과가 나옴으로 인해서 NP를 40개로 증가시켜 해석을 수행하였다. 역해석 iteration 16번째에서 오차율 이내에  값을 찾을 수 있었다. 해석 Case (d)에서는 최대 3개의 서로 다른 미지수(역해석 대상 값,
값을 찾을 수 있었다. 해석 Case (d)에서는 최대 3개의 서로 다른 미지수(역해석 대상 값,  )를 탐색하도록 구성하였기 때문에 NP 및 iteration 최대값을 40 정도 수준으로 고려하였지만, 미지수가 더 많은 케이스를 해석하기 위해서는 이 두 값을 증가시켜야 할 것으로 판단된다. 하지만, 해석 속도 증가를 위해서 개발한 목적함수인 빔-스프링 모델의 역할에 기인해서 역해석 횟수가 증가해도 전체적인 해석 시간은 실시간에 가깝게 소요될 것으로 판단된다.
)를 탐색하도록 구성하였기 때문에 NP 및 iteration 최대값을 40 정도 수준으로 고려하였지만, 미지수가 더 많은 케이스를 해석하기 위해서는 이 두 값을 증가시켜야 할 것으로 판단된다. 하지만, 해석 속도 증가를 위해서 개발한 목적함수인 빔-스프링 모델의 역할에 기인해서 역해석 횟수가 증가해도 전체적인 해석 시간은 실시간에 가깝게 소요될 것으로 판단된다.
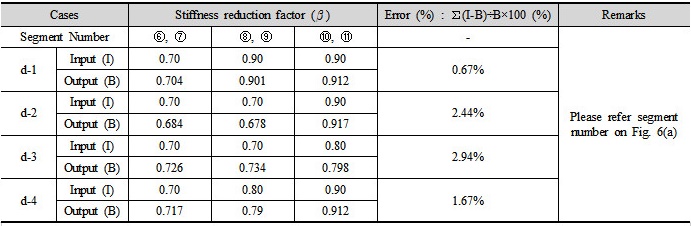
Table 4에서 보는 바와 같이 지반강성 저감계수( ) 값에 대한 역해석 결과, 해석 케이스 전반적으로 5% 미만의 오차율을 보이는 결과가 산정되었다. 구축된 BS+DEA 시스템이 오차범위 안에서 구동하는 것을 확인할 수 있었고, 향후에 다양한 케이스에 대해서 해석을 수행해서 정보화하면, 운영 중 해저 터널의 종단방향 안정성 평가방법을 세그먼트 라이닝 개별 링의 변위로부터 구해진 휨모멘트를 통해서 표현할 수 있을 것을 판단된다. 횡단방향에 대해서도 같은 개념의 활용하면 운영 중 쉴드터널의 종합적인 안정성 평가 방법이 도출될 것을 판단된다. 또한 역해석 과정을 통해서 터널 주변 지반 강성 열화 정보를 터널의 안정성 평가에 활용할 수 있을 것으로 기대된다.
) 값에 대한 역해석 결과, 해석 케이스 전반적으로 5% 미만의 오차율을 보이는 결과가 산정되었다. 구축된 BS+DEA 시스템이 오차범위 안에서 구동하는 것을 확인할 수 있었고, 향후에 다양한 케이스에 대해서 해석을 수행해서 정보화하면, 운영 중 해저 터널의 종단방향 안정성 평가방법을 세그먼트 라이닝 개별 링의 변위로부터 구해진 휨모멘트를 통해서 표현할 수 있을 것을 판단된다. 횡단방향에 대해서도 같은 개념의 활용하면 운영 중 쉴드터널의 종합적인 안정성 평가 방법이 도출될 것을 판단된다. 또한 역해석 과정을 통해서 터널 주변 지반 강성 열화 정보를 터널의 안정성 평가에 활용할 수 있을 것으로 기대된다.
5. 결 론
본 연구에서는 고수압 초장대 해저터널의 운영 중 안정성 평가 방법을 도출하기 위해서 선행 연구에 의해 구축된 변위-응력-강성(열화) 기반의 차분진화 알고리즘(DEA)에 구조해석이 가능한 빔-스프링 모델을 개발하고 연동하여, 하나의 시스템으로 구성하였다. 우선, DEA와 해석용 솔버의 연동을 위해서 해저터널의 종단 길이 방향에 대해서만 고려하여 연구를 수행한 결과로 확인한 결론은 다음과 같다.
1.해석 Case (b)와 (c)를 통해서 개발된 빔-스프링 모델이 이상 없이 구동함을 확인하였다. 입력변수 중 지반강성 변화에 따른 변위의 변화양상을 확인하고, 입력변수에 따른 해석 결과(종단변위, 전단력, 휨모멘트)를 MS-Excel 프로그램으로 구축한 검증용 모델과 비교를 통해 오차범위 안의 값이 산정됨을 확인하였다.
2.해석 Case (d)를 통해서 쉴드터널 시공 시 보강된 지반(중점관리구간)에 설치된 지반강성 열화계측기로부터 운영 중 터널에서 계측데이터를 획득할 수 있다는 가정 하에 역해석을 수행한 결과로부터, 운영 중 쉴드터널의 안정성 평가가 가능함을 확인하였다. 탐색결과 오차율은 5% 미만의 결과를 보였고, 구축된 BS+DEA 시스템이 오차범위 안에서 구동하는 것을 확인할 수 있었다.
3.서로 상관관계가 적은 미지수들을 탐색하는 조건에서 많은 개체수(NP)와 최대진화횟수(itermax)가 필요하므로, 기존 상용 프로그램으로 해석하는 경우 해석모델에 따라 해석시간이 많이 소요된다. NP 및 최대진화횟수 값을 증가시켜도 BS+DEA 모델의 해석시간이 빨라서, 빠른 시간 내에 미지수 탐색이 가능함을 확인할 수 있었다. 이러한 결과로 운영 중 쉴드터널의 안정성 평가가 가능함을 확인하였고, 전체적인 해석 시간은 실시간에 가깝게 소요될 것으로 판단된다.
본 연구에서는 운영 중 터널에서 획득 가능한 계측 데이터를 기반으로 한 터널 역해석 알고리즘과 해석 시간 단축과 역해석 알고리즘과의 연동성에 목표를 두고 개발한 빔-스프링 모델 해석 솔버의 적합성을 확인하기 위하여 운영 중 발생된 미소변위, 터널 주변 지반 응력, 지반 및 라이닝의 강성 열화 정보 등을 가정하여 해석을 수행하였다. 단, BS+DEA 터널 종단방향 프로그램의 적합성을 확인하기 위하여 가정된 물성치를 적용하였으며, 터널 주변지반의 강성 열화 정보의 계측이 가능한 경우에 적용이 가능한 한계점이 있다. 또한, 전술한 바와 같이, 세그먼트 조인트 및 링 세그먼트 조인트의 영향을 고려하기 위해서 강성저감계수( )를 적용하였으나, 실물실험 등을 통해서 획득할 수 있는 한계점을 내포하고 있다. 향후 연구에서는 횡단방향의 빔-스프링 모델의 개발을 통해 본 연구에서 구축된 종단방향 모델과 통합하여 운영 중 터널에 안정성 평가에 대한 독립적인 시스템으로 개발하여 실제 현장에 적용할 예정이다.
)를 적용하였으나, 실물실험 등을 통해서 획득할 수 있는 한계점을 내포하고 있다. 향후 연구에서는 횡단방향의 빔-스프링 모델의 개발을 통해 본 연구에서 구축된 종단방향 모델과 통합하여 운영 중 터널에 안정성 평가에 대한 독립적인 시스템으로 개발하여 실제 현장에 적용할 예정이다.
