1. 서 론
2. 레이저 스캐닝 기술
3. 영상 이미지 스캐닝 기술
4. 향후 기술 개발 방향
5. 결 론
1. 서 론
지난 수십 년 동안 제한된 국토 면적을 보다 효율적으로 사용하기 위해 수 많은 터널 공사가 수행되었으며, 철도, 지하철과 도로 등의 교통수단으로 활용되고 있다. 터널 라이닝과 같은 콘크리트 구조물은 시간이 경과하면서 구조적, 자연적, 환경적 요인으로 인하여 균열, 누수, 박리, 박락, 재료분리, 철근 노출 등의 열화 및 손상이 발생한다(Yoon and Lee, 2008; Kim and Lee, 2018). 이러한 터널의 손상은 부실하거나 부적절한 유지관리와 유지보수로 인해 점진적으로 악화된다(Montero et al., 2015). 2006년 미국 보스턴의 Big-Dig 터널의 천장 붕괴(NTSB, 2006)와 2012년 일본의 Sasago 터널의 천장 붕괴(Kawahara et al., 2014)는 터널의 구조적 손상과 관련된 사고의 대표적인 케이스로 볼 수 있다. 그러므로 이러한 지하구조물은 활용 목적과 관계없이 정기적인 점검을 통해 구조물의 파손에 의한 사고를 방지하고 동시에 노후화를 조기에 파악하여 필요한 유지보수를 수행함으로써 터널의 성능과 수명을 연장해야 할 필요가 있다(Park, 2013; Huang et al., 2021; Lee et al., 2022). 현재까지 터널에 대한 유지관리는 자격 있는 기술자의 육안 관찰을 통해 주로 수행되고 있다. 인력에 의한 육안 조사에 의존하고 있어 접근이 어려울 경우 조사가 불가능하며, 기술자의 숙련도에 따라 조사된 손상에 대해 객관적이고 정량화하기가 어렵다. 또한, 문서화된 점검결과는 이력 관리에도 한계가 있다(Yoon and Lee, 2008).
터널의 상태평가를 위한 외관조사 시 터널의 손상을 식별하고 평가하는 기술자의 주관적인 판단에 크게 의존하므로 외관조사 결과가 부정확하거나 누락될 가능성이 있다. 더욱이 터널의 경우 어두운 조명, 습도, 먼지와 오염, 안전사고 방지를 위한 교통통제 등의 위험한 환경에서 조사를 수행해야하는 문제점들이 있다(Balaguer et al., 2014). 국내외에서는 육안 외관조사의 한계를 해결하는 방법으로 도로 표면, 콘크리트 구조물, 터널 콘크리트 라이닝과 같은 구조물에서 균열과 누수 등의 손상을 비접촉 방식으로 자동 검출할 수 있는 이동식 상태점검 장비 또는 시스템 개발의 필요성이 증가하고 있다(Chapman et al., 2016; Kim and Lee, 2018).
터널의 상태점검 시스템의 자동화와 효율성을 향상시키기 위해서 레이저 스캐닝(Laser scanning) 기술 또는 영상 이미지 스캐닝(Image scanning) 기술을 활용하여 비접촉 이동식 상태점검 장비와 시스템을 개발하고 있다(Attard et al., 2018). 이러한 장비 및 시스템은 터널 점검 시 빠른 데이터 수집, 균열과 누수 등 자동손상 식별 및 문서화뿐만 아니라 구조적 변화 감지를 통해 점검 시간을 절약하는 자동화된 시스템 개발에 목적을 두고 있다. 이에 본 연구에서는 평균 80 km/h 이상의 주행속도로 터널 점검이 가능한 비접촉 이동식 상태점검 장비 개발을 위하여 국내외 터널 스캐닝 장비의 기술 동향을 분석하여 개발에 필요한 시사점을 도출하고자 한다.
2. 레이저 스캐닝 기술
레이저 스캔은 레이저 빔을 대상에 비추고 반사되는 광선의 양을 측정하는 LiDAR (Light Detection and Ranging)로 알려진 기술이다. 레이저 반사 시간과 파장을 분석하여 물체나 환경의 위치와 치수를 파악할 수 있다(Wang et al., 2014). 2000년대에 들어서 터널 내부의 변형을 탐지하기 위하여 토탈 스테이션(Total station) 기술이 도입되었다. 이 기술은 높은 정확도를 갖지만 낮은 측정 속도, 측정할 수 있는 포인트 수의 제한 등의 문제점이 있었다. 대안으로, 터널 내부 단면을 지상 레이저 스캐너(Terrestrial Laser Scanner, TLS)로 취득한 3차원 포인트 클라우드(Point cloud)를 터널 시공과 유지관리에 적용하기 위한 다양한 연구들이 수행되었다(Van Gosliga et al., 2006; Kim and Lim, 2007; Lee and Yun, 2007; Yoon et al., 2007; Roh et al., 2008; Seo et al., 2008; Han et al., 2010; 2013; Lee et al., 2011; Kang et al., 2012; Li et al., 2012). TLS의 포인트 클라우드는 터널 내부의 라이닝 변위 측정과 3차원 매핑에 유리한 장점이 있지만, 입사각으로 인해 측정 거리가 먼 영역에서는 포인트 클라우드의 밀도(Point cloud density)가 줄어드는 한계가 있다. 그러므로 연장이 긴 터널의 경우 스캔을 위해 여러 관측점에서 측정해야 하며, 대규모의 포인트 클라우드 데이터로 인해 높은 분석 비용과 시간이 필요하다(Cui et al., 2019).
TLS는 다양한 제조사에서 생산되고 있으며, 사용된 장비의 성능에 따라 결과물에서도 차이를 나타낸다. Table 1은 2020년도에 상용화된 TLS 제품을 정리한 것이다(O’Neill, 2020). TLS의 최신 제품 중 Surphaser사의 100HSX 스캐너는 최대 정확도가 0.3 mm 정도로 매우 높으나, 고해상도로 스캔할 경우 측정 거리가 10 m 이내이여야 하며 긴 측정 시간이 요구된다. 또다른 TLS 제품인 Zoller+Fröhlich사의 Z+F IMAGER 5016 스캐너는 측정 거리 10 m 이내의 근접 스캔 시 포인트 클라우도 밀도가 0.6 mm로 조밀한 초고해상도 결과를 얻을 수 있지만, 반사강도 값의 변화에 의하여 0.1 mm 단위의 미세 균열과 손상에 대해서는 검출이 불가능하다(Stałowska et al., 2022). 터널 유지관리 측면에서 TLS는 연장이 길고 폭이 넓은 터널에서 설치 및 측정 시간이 오래 걸리며, 교통통제 이후 인력에 의해 수행되는 전통적인 수동 방식의 외관조사라는 점에서 한계가 존재한다(Yoon et al., 2009).
Table 1.
Terrestrial laser scanners
|
Manufacturer
|
Model
|
Accuracy
|
Working range
|
Acquisition speed
|
|
Leica Geosystems
|
Leica BLK360
|
4 mm
|
0.6~60 m
|
360,000 points/s
|
|
FARO
|
Focus S 70
|
2 mm
|
0.5~70 m
|
976,000 points/s
|
|
Trimble
|
X7
|
2 mm
|
0.6~80 m
|
500,000 points/s
|
|
Artec 3D
|
Ray
|
0.7 mm
|
3~110 m
|
208,000 points/s
|
|
Teledyne Optech
|
Polaris
|
5 mm
|
1.5~2,000 m
|
-
|
|
Zoller+Fröhlich
|
Z+F IMAGER 5016
|
0.5 mm
|
0.3~365 m
|
1,100,000 points/s
|
|
Surphaser
|
100HSX
|
0.3 mm
|
1~50 m
|
1,200,000 points/s
|
|
RIEGL
|
VZ-400i
|
5 mm
|
0.5~250 m
|
500,000 points/s
|
|
Maptek
|
SR3
|
4 mm
|
1~600 m
|
-
|
|
Topcon
|
GLS-2000
|
3.5 mm
|
1~150 m
|
120,000 points/s
|
레이저 스캐닝 기반의 이동식 장비는 이동식 레이저 스캐너(Mobile Laser Scanner, MLS), 주행 기록계와 IMU (Inertial Measurement Unit) 등의 센서를 통합하여 터널의 고밀도 포인트 클라우드를 신속하게 취득할 수 있도록 개발되고 있다. 국내에서 레이저 기반 이동식 터널 스캐닝 장비 관련 연구로 Sagong et al. (2006)은 철도 터널에 적용가능한 시작품 제작 관련 연구를 수행하였으며, 후속연구로 Yoon et al. (2009)은 콘크리트 라이닝에서 균열 검출을 시도하였다. 5 mm미만 균열 폭은 검출이 어렵고 향후 포인트 클라우드의 조밀도가 높을수록 개선될 수 있는 가능성을 확인하였다. 국내와 다르게 국외에서는 MLS를 활용한 이동식 터널 스캐닝 장비 개발이 활발하게 수행되고 있다. 국외 민간기업에서 개발한 장비로는 스위스의 AMBERG사의 IMS 5000, Leica Geosystems사의 Sitrack One, 독일의 SPACETEC사의 TS-3, 중국 Hi-Rail사의 rMMS 등이 있다(Amberg, 2023; Hi-Rail, 2023; Leica Geosystem, 2023; Spacetec, 2023). 또한, 중국의 Capital Normal University의 TMMS (Du et al., 2018; Sun et al., 2020; Ji et al., 2023)와 Wuhan University의 SDMLS (Cui et al., 2019; Xu et al., 2022)등 MLS 포인트 클라우드를 활용한 터널 스캐닝 시스템에 대한 연구가 지속적으로 수행되고 있다. Table 2는 이동식 레이저 터널 스캐닝 장비의 스캔 속도, 정확도와 사용된 레이저 센서를 보여주고 있다. 대다수의 장비는 철도 터널에서 주로 사용되고 있으며 일부 장비는 트롤리(Trolley) 방식으로 스캔 속도는 3~5 km/h이다. SPACTEC사의 TS-3는 철도와 도로 터널에 사용이 가능하며, Tabrizi et al. (2017)은 미국 펜실베니아주 피츠버그에 위치한 Armstrong tunnel과 Liberty tunnel에서 TS-3의 현장 적용가능성을 검토하였다.
Table 2.
Mobile laser scanning systems
|
Mobile scanning system
|
Scanning accuracy
|
Point density
|
Scanning speed
|
Mobil laser scanner
|
IMS 5000
(AMBERG)
|
3 mm
|
-
|
4 km/h
|
Amberg Profiler 6012
|
Sitrack: One
(Leica Geosystem)
|
5 mm
|
-
|
4 km/h
|
Leica P40 scanner
|
TS-3
(SPACETEC)
|
-
|
3 mm
|
2 km/h
|
TS3 (unknown)
|
rMMS
(Hi Rail)
|
2 mm
|
-
|
3~5 km/h
|
Z+F Profiler 9012
|
TMMS
(C.N. Univ.)
|
2 mm
|
-
|
3~5 km/h
|
Z+F Profiler 9012
|
SDMLS
(Wuhan Univ.)
|
2 mm
|
-
|
3~5 km/h
|
Faro Focus 350
|
TLS와 MLS를 활용한 터널 스캐닝 시스템은 터널의 변형 감지와 단면 추출을 위해 좌표기반의 위치정보에 따른 터널 형상의 3차원 모델 구현의 정확도 향상에 많은 연구가 수행되고 있다. 토탈 스테이션의 절대좌표를 기준으로 RMSE (Root Mean Square Error)가 10 mm 미만으로 비교적 정확하게 구현이 가능함을 확인하였다. 하지만 이동식 레이저 스캔 속도는 최대 5 km/h로 매우 저속으로 정보를 취득하고 있어 본 연구의 성능 목표인 80 km/h 평균주행속도에서 레이저 스캔 기술의 적용은 어려울 것으로 판단된다.
3. 영상 이미지 스캐닝 기술
사진 측량과 컴퓨터 비전 알고리즘의 발달로 터널 점검에서 영상 이미지를 활용하는 방법과 이를 이용한 자동화 시스템의 개발에 관심이 증가하고 있다(Alidoost et al., 2022). 특히, 최근 몇 년 동안 컴퓨터 비전 기술의 지속적인 발전은 영상 이미지로부터 터널의 균열과 누수 등의 손상 검출에 대한 수단으로서 활용되고 있다(Wang et al., 2022). 영상 이미지를 취득하기 위한 카메라는 이미지 센서인 영역스캔(Area scan)과 라인스캔(Line scan)으로 구분된다. 영역스캔 카메라는 이미지를 캡쳐(Capture)하는 매트릭스 픽셀로 길이와 너비로 구성된다. 전체 이미지를 한번에 수집해야 하거나 물체의 움직임을 센서와 동기화하는 것이 어려운 상황에서 사용되며, 복잡하지 않은 컴퓨터 비전에 비교적 많이 활용되고 있다. 라인스캔 카메라는 이미지를 빠르게 수집하기 위해 단일 행의 픽셀로 길고 좁은 센서를 사용하여 2차원 이미지를 생성한다. 개체를 센서의 좁은 축을 따라 이동하고 한번에 한 라인씩 스캔하고 소프트웨어를 사용하여 이미지를 재구성한다. 하지만 안정적인 이미지를 얻기 위해서는 라인 스캔 센서와 물체의 움직임을 동기화하는 것이 필수적이다(Bae et al., 2021).
국내에서 카메라를 활용한 터널 스캐닝 장비의 초기연구로 Ko et al. (2004)과 Yu et al. (2007)은 라인스캔 카메라를 활용하여 5 km/h의 주행속도로 분해능 0.3 mm/pix의 이미지 취득이 가능한 모바일 로봇 시스템을 개발하였다. 취득한 이미지로부터 균열을 검출하기 위해 이미지 프로세싱(Image processing) 기법을 활용하였다. Sagong et al. (2012)은 레이저 센서와 영역스캔 카메라를 조합한 터널 스캐닝 장비의 개념을 검토하였다. Park (2013)은 고속 영역스캔 카메라를 활용하여 분해능 0.5 mm/pix과 80 km/h의 주행속도를 갖는 터널 스캐닝 시스템의 장비 구성과 가능성을 개념적으로 제시하였다. Kim and Lee (2018)는 40 km/h 주행속도로 터널 콘크리트 라이닝에 발생한 0.1 mm 균열 폭을 검출하기 위하여 4K 영역스캔 카메라와 이미지 프로세싱 기반 균열 자동 검출 소프트웨어를 탑재한 터널 스캐닝 시스템을 개발하였다.
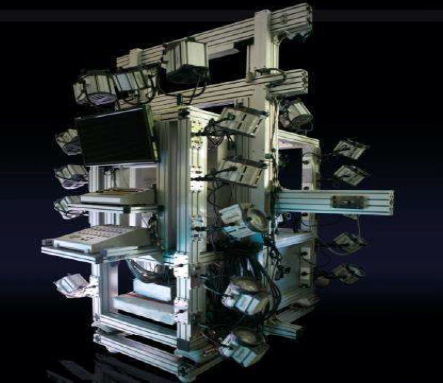
최근에는 국가 R&D를 통해 건설신기술(Construction New Technology, CNT)로 카메라 기반의 터널 스캐닝 시스템 3건이 등록되었다(Table 3). KMTL은 2K 영역스캔 카메라를 활용하여 10 km/h의 속도로 0.1 mm/pix 분해능의 이미지를 취득 가능하며(CNT 887, 2020), 딥인스펙션은 4K 영역스캔 카메라를 활용하여 최대 50 km/h의 속도에서 0.5 mm/pix 분해능의 이미지 취득 가능성을 제시하였다(CNT 898, 2020). MTEC은 4K 영역스캔 카메라로부터 최대 50 km/h 주행속도로 이미지 취득이 가능함을 제시하였다. MTEC의 터널 스캐닝 장비는 회전식 등속 촬영 장치를 이용하여 기존 장비처럼 터널 벽면을 정면으로 촬영하는 방법이 아닌 카메라 지그를 회전하여 회전속도와 차량 진행방향에 맞게 속도를 연동하는 방식을 특허기술로서 사용하고 있다(CNT 935, 2022). 또한, 빅아이시스템은 일본 Kurabo사의 4K 라인스캔 카메라 기반의 터널 스캐닝 장비이며 최대주행속도 80 km/h에서 1.0 mm/pix 분해능의 이미지 취득이 가능하다(Lee et al., 2020).
각각의 터널 스캐닝 장비는 컴퓨터 비전 알고리즘을 활용하여 균열 폭, 길이와 위치 등 자동 측정 및 검출을 위한 자체 소프트웨어를 개발하여 활용하고 있다. 하지만 자체 실험을 통해 0.1~0.2 mm 단위의 균열 폭 검출 가능성을 검토하였을 뿐, 아직 국내에서는 이미지 기반 터널 스캐닝 장비의 성능과 품질을 분석하기 위한 시험 방법과 기준 등이 없어 각 장비의 객관적인 성능 비교에는 한계가 있다.
일본의 Ukai (2007)는 5K 라인스캔 카메라를 활용하여 최대 속도 10 km/h에서 0.5~1 mm/pix 분해능을 갖는 철도 터널용 스캐닝 장비를 개발하였고 이미지 프로세싱 기법으로 균열 검출을 시도하였다. 스페인의 Gavilán et al. (2013)은 6대의 카메라와 레이저 센서가 장착된 터널 스캐닝 장비를 개발하였으며, 최대 주행속도 30 km/h에서 이미지와 포인트 클라우드의 동시 취득 가능성을 검토하였다. Zhan et al. (2015)은 다중 카메라와 이를 위한 조명 시스템이 설치된 철도 터널용 스캐닝 장비에서 60 km/h 속도로 주행할 경우 발생하는 진동에 의한 오류를 보정하기 위한 연구를 수행하였다. Yasuda et al. (2016; 2020)은 레이저 센서, 영역스캔 카메라와 레이더(RAdio Detection And Ranging, RADAR) 센서가 통합 설치된 MIMM-R을 개발하였다. 50~70 km/h 주행이 가능하고 취득한 이미지로부터 0.3 mm 균열 폭 식별이 가능함을 제시하였다. Jiang et al. (2019)은 100 km/h 속도에서 0.5 mm/pix 분해능을 확보하기 위한 도로 터널용 차량 스캐닝 장비(eQ-Doctor-T)를 개발하였다. 0.25 mm의 균열 폭 검출을 위해 고휘도 조명과 4K 라인스캔 카메라를 적용하였다. 자체 소프트웨어를 사용하여 조명의 휘도 부족, 0.2 mm 미만 균열 폭, 먼지 등 오염과 렌즈의 초점이 불일치한 경우에는 균열 검출이 불가능한 것으로 평가하였다. 중국의 Wuhan Zoyon Company는 2K 영역스캔 카메라를 활용하여 도로 터널용 스캐닝 차량 장비(Chapman et al., 2016)와 철도 터널용 스캐닝 장비(Huang et al., 2021)를 개발하였다. ZSRIT (Zhejiang Scientific Research Institute of Transport)은 머신비전 카메라를 이용한 고속도로 터널 스캐닝 장비 개발을 위해 1K 영역스캔 카메라와 일본의 MIMM-R을 벤치마킹한 레이저 센서와 레이더 센서를 부착하여 시범 테스트 중이다. 또한, 이미지 프로세싱 기법을 활용한 균열 폭 측정을 위해 그레이 스케일(Gray scale)로 조정한 픽셀의 영향범위로부터 균열 폭 검출 알고리즘을 검증하였다. 해당 알고리즘으로 0.5 mm의 균열 폭 검출 시 오차는 약 10% 정도인 것으로 평가되었다(Wang et al., 2022). 독일의 Alidoost et al. (2022)은 60~65 km/h의 주행속도로 촬영이 가능하도록 4K 영역스캔 카메라와 조명 장치에 대한 성능을 정의하고 설계하였다.
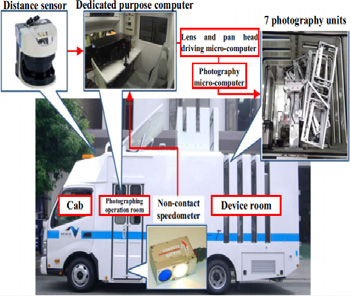
일본의 공공공사 신기술 활용 시스템(NEw Technology Information System, NETIS)은 공공공사에서 신기술의 활용, 검토 및 사후관리를 효율화하고, 활용 리스크를 경감하여 유용한 신기술을 적극적으로 활용할 수 있도록 지원하는 공공시스템이다(RICON, 2021). 국내 건설신기술과 비슷한 일본의 NETIS에는 카메라 기반 터널 스캐닝 장비가 5건 등록되어 있다(Table 4). 등록된 5건의 핵심 장치는 카메라이며, 영역스캔 카메라를 활용한 장비는 MIMM-R과 Tunnel Tracer이다. 라인스캔 카메라를 활용한 장비는 MMSD II, TC-3, eQ-Doctor-T 등 3건이 등록 되어있다.
Table 4.
 |  |  |  |  |
| MMIM-R | Tunnel Tracer | MMSD II | TC-3 | eQ Doctor T |
|
KK-130026-VE
|
CB-180027-A
|
HR-180004-VR
|
KT-190037-VR
|
QS-170150-VR
|
|
Developed in 2013
|
Developed in 2018
|
Developed in 2018
|
Developed in 2019
|
Developed in 2017
|
|
2K area scan
|
4K area scan
|
8K line scan
|
4K line scan
|
4K line scan
|
0.75 mm/pix (20 km/h)
1.5 mm/pix (70 km/h)
|
0.1 mm/pix (3 km/h)
1.5 mm/pix (50 km/h)
|
0.25 mm/pix (30 km/h)
1.0 mm/pix (80 km/h)
|
1.0 mm/pix (80 km/h)
|
1.0 mm/pix (80 km/h)
|
영역스캔 카메라를 활용한 터널 스캐닝 장비로 촬영 가능한 최대 주행속도는 50~70 km/h이고 분해능은 1.5 mm/pix이다. 터널 트레이서의 경우 2~3 km/h의 저속주행 시 분해능 0.1 mm/pix의 이미지 확보가 가능함을 제시하였다. 라인스캔 카메라의 경우 최대 주행속도 80 km/h에서 분해능 1 mm/pix의 이미지 취득이 가능하며, MMSD II의 경우 30 km/h의 속도에서 분해능 0.25 mm/pix의 이미지 취득 가능성을 제시하였다. 각 터널 스캐닝 장비는 주행속도 20~80 km/h로 촬영한 터널 콘크리트 라이닝 표면 이미지로부터 균열 폭 0.2~0.3 mm에 대하여 검출하는 것을 장비의 성능 목표로 제시되고 있다(NETIS, 2023).
Fig. 1은 4K 영역스캔 카메라를 활용한 Tunnel Tracer로 2~3 km/h의 주행속도에서 촬영한 것이다. 이미지 분해능을 0.1 mm/pix로 취득한 고행상도 이미지로부터 0.1 mm 균열 폭이 육안으로 식별 가능함을 보여주고 있다. 하지만 차량 주행속도가 매우 저속으로 촬영한 이미지이므로 정지상태일 때 촬영한 이미지의 품질과 같다고 볼 수 있다. 사용된 카메라의 노출 성능 확인은 어려우나 해당 영역스캔 카메라를 활용하여 40 km/h의 속도로 촬영할 경우, 모션블러(Motion blur)가 발생하므로 높은 해상력을 갖는 이미지 취득에는 한계가 있을 것으로 판단된다.
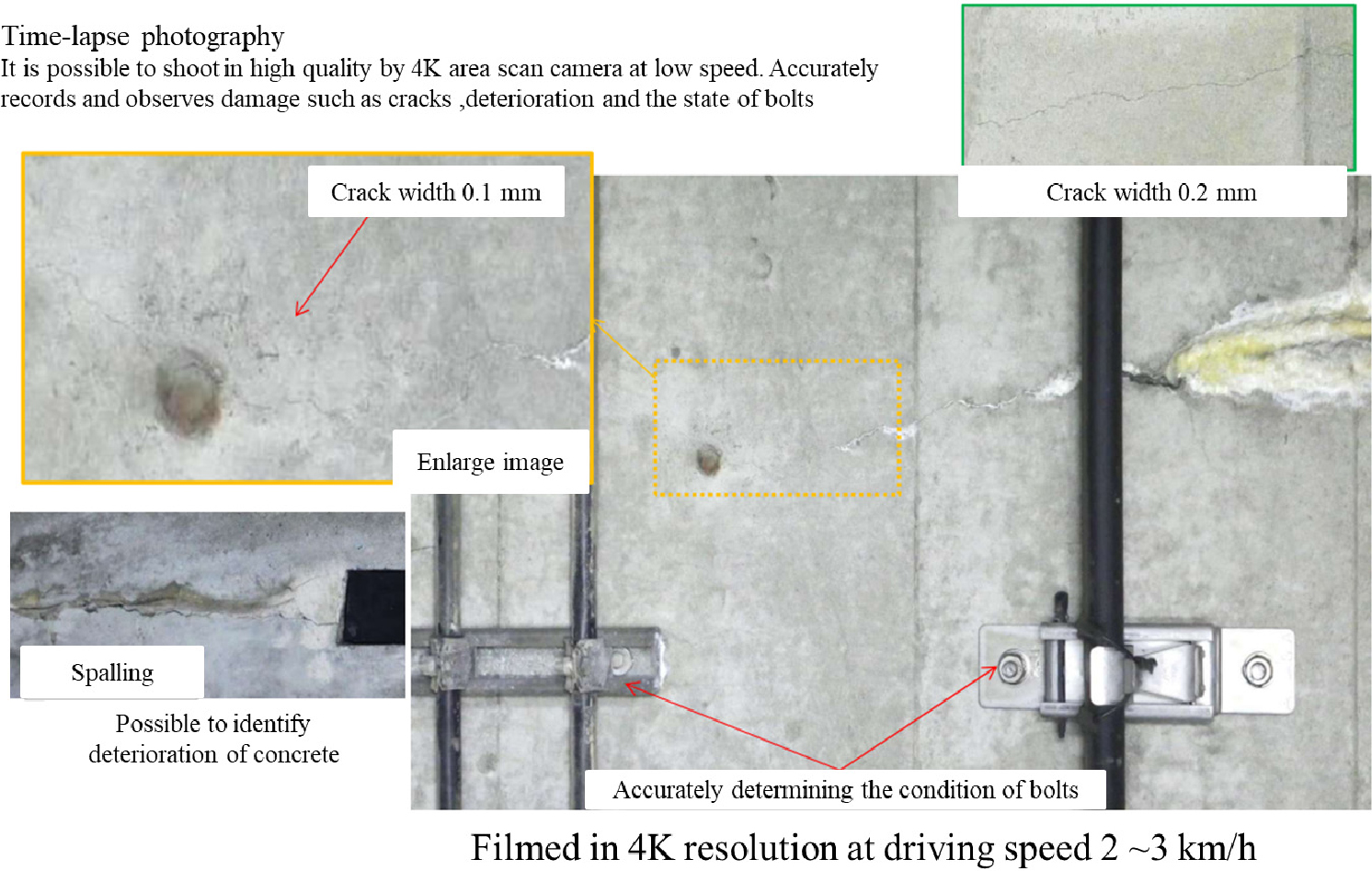
Fig. 1.
Detecting 0.1 mm crack on image of area scan camera (by Tunnel Tracer)
일본의 터널 스캐닝 장비의 성능 목표로 제시된 0.2 mm 균열 폭 검출은 이미지상에서 육안 식별로 0.2 mm 균열이 시각적으로 확인되는 것을 의미한다. Fig. 2와 같이 터널 콘크리트 라이닝 표면에 다양한 균열 폭을 가진 스케일 차트를 부착하고 4K 라인스캔 카메라를 활용한 TC-3 장비로 취득한 이미지에서 0.2 mm 균열 폭 관측이 가능한 것으로 제시하고 있다. 이미지를 확대하여 표시한 균열 폭 스케일 차트에서 검은색 실선인 플리커 현상(조명에 의한 난반사 영향)이 발생하였다. 이것은 라인스캔 카메라의 단점을 명확하게 보여주는 것이다. 터널에 설치된 조명 장치의 경우 동일한 크기의 제품이지만 이미지에서는 왜곡 및 공백이 발생하여 조명 크기를 서로 상이하게 보여주고 있다. 이것은 이미지 정합 시 불균형 문제가 있는 것으로 판단된다. 영역스캔 카메라에 비해 라인스캔 카메라는 촬영 시 차량 주행속도를 일정하게 유지하여야 한다. 차량의 속도 변화에 따라 Fig. 2와 같이 이미지 왜곡 또는 공백에 의한 정합오류가 발생할 수 있다.
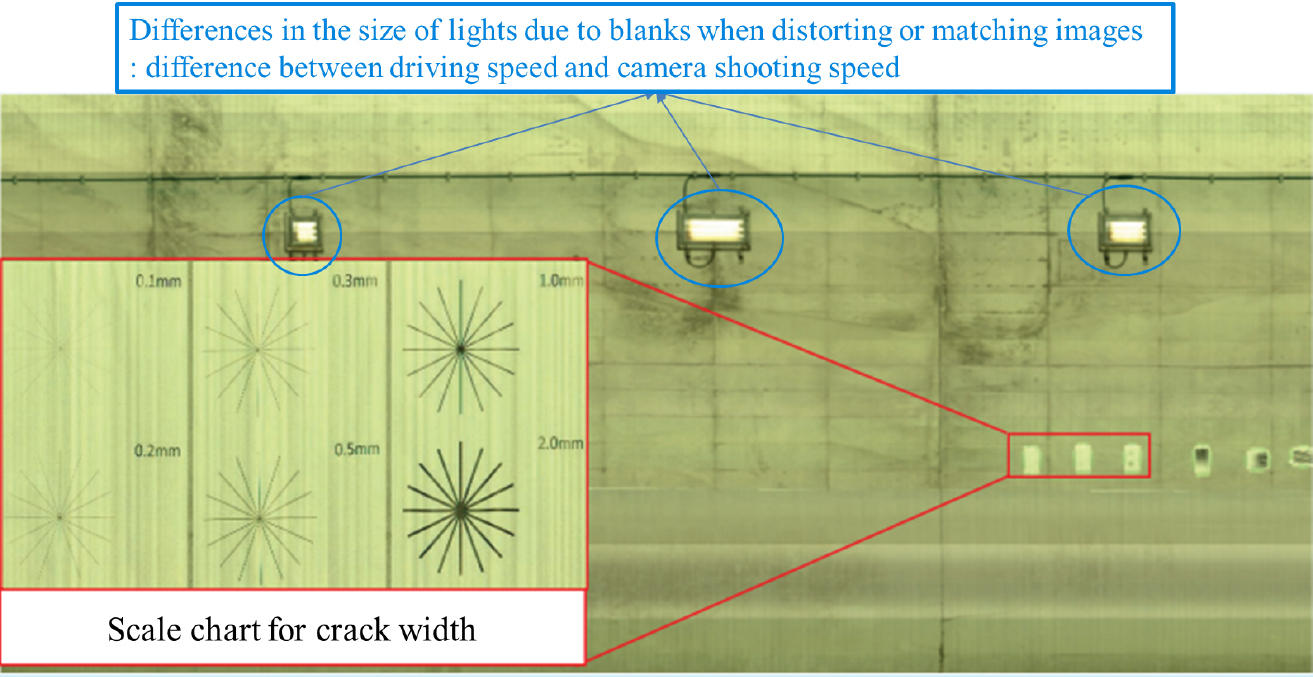
Fig. 2.
Detecting crack on image of line scan camera (by TC-3)
조사된 모든 일본의 터널 스캐닝 장비는 카메라와 레이저 스캐너를 함께 탑재하여 활용하고 있는 반면, 국내 터널 스캐닝 장비는 카메라만 활용하고 있는 실정이다. 이미지와 레이저 스캔 데이터를 결합한 터널의 3차원 모델은 기존 점검/진단 및 유지관리보다 다양한 용도로서 활용 가능성을 내포하고 있다(Sagong et al., 2012). 레이저 스캔 센서는 5 km/h의 속도에서 활용되고 있는 반면, 카메라는 최소 20 km/h에서 최대 80 km/h의 속도로 촬영하므로 데이터의 취득 속도에서 큰 차이가 발생한다. 그러므로 영상 이미지와 레이저를 동시에 스캔하기 보다는 각각 용도에 맞게 별도로 수행되는 것으로 볼 수 있다. 레이저 스캔은 포인트 클라우드로부터 터널 라이닝의 기하하적 특성을 재현하는데 목적을 두고 있고 영상 이미지는 터널 라이닝 표면의 균열이나 누수 등의 손상을 파악하기 위한 목적을 두고 개발된 것으로 추정할 수 있다.
4. 향후 기술 개발 방향
현재 개발되는 터널 스캐닝 장비는 레이저 스캔과 영상 이미지 스캔의 두 가지 기술로 구분할 수 있다(Sagong et al., 2006; Alidoost et al., 2022). 레이저 스캐닝은 3차원 매핑을 위한 센서 중 하나로서 지상 또는 이동식 장비에 설치하여 터널 라이닝 표면에 조밀한 포인트 클라우드 데이터를 정확하게 취득하기 위한 기술이다(Chen et al., 2015). TLS는 정지된 상태에서 터널 단면의 고밀도 및 고정밀의 포인트 클라우드를 얻을 수 있으나, 실제 운용 시 입사각의 한계로 관측점을 이동하며 측정하므로, 유지관리 측면에서는 비효율적이라 할 수 있다. GPS (Global Positioning System), GNSS (Global Navigation Satellite System) 또는 SLAM (Simultaneous Localization and Mapping) 기반의 MLS는 TLS의 설치 및 측정 시간의 단점을 보완하여 포인트 클라우드를 단시간에 취득할 수 있다(Ji et al., 2023). 그러나 MLS는 TLS에 비해 고가이고 정확도(Accuracy)도 TLS보다는 떨어지는 한계가 있다(O’Neill, 2020).
지난 10년 동안 이미지 기반의 사진 측량을 통한 터널 점검 기술은 고속 촬영과 다중 영상 이미지 처리기술의 발전으로 점점 상용화 되고 있다. 영상 이미지 스캐닝 기술은 TLS에 필적하는 수준의 기하학적 정확도를 제공함과 동시에 3차원 모델 생성 시간을 절반으로 줄일 수 있다(Panella et al., 2020). 이미지 데이터를 활용하여 컴퓨터 비전 알고리즘을 통해 균열에 대한 자동 검출도 가능하다(Montero et al., 2015). 그러나 이미지를 이용한 SfM (Structure from Motion) 알고리즘의 위치 좌표를 보정하기 위하여 GCP (Ground Control point)를 설치하고 토탈 스테이션을 이용한 측정이 필요하다(Martínez-Carricondo et al., 2018). 레이저 스캔과 다르게 터널 영역을 촬영하기 위한 다중 카메라, 어두운 환경에서 촬영하기 위한 조명장치, 고용량 데이터 저장장치 등이 부가적으로 필요하다. 사진 측량의 정확도에서 가장 중요한 요소들은 이미지 품질(해상도, 픽셀 크기와 조명 조합), 카메라 보정, 네트워크 등이 있다. 레이저 스캔 보다 고려해야할 이러한 요소들이 다수 존재하여 향후 효율적인 자동화 점검 시스템 개발을 위한 해결과제로 남아있다(Panella et al., 2020).
비접촉 이동식 상태점검 장비의 개발 방향에 대한 시사점을 도출하기 위해 국내외 터널 스캐닝 장비의 동향을 조사 및 분석하였다. 레이저 스캐닝 장비는 포인트 클라우드로부터 터널라이닝의 기하하적 특성을 재현하는데 장점이 있다. 이미지 스캐닝 장비는 터널 라이닝 표면에 발생하는 미세한 균열, 누수 등 손상을 파악하는데 이점이 있다. 향후 개발 예정인 비접촉 이동식 상태점검 장비의 성능 목표는 80 km/h 이상의 주행속도에서 0.3 mm/pix 분해능의 이미지를 취득하는 것이다. 취득된 이미지에서 컴퓨터 비전 알고리즘을 통해 최소 0.3 mm 균열 폭과 이에 상응하는 수준의 손상을 탐지 및 검출하는데 목적을 두고 있다. 이에 레이저 스캔 방식보다는 카메라를 활용한 영상 이미지 스캐닝 장비의 개발이 필요할 것으로 판단된다. 또한, 이미지 취득을 위한 카메라는 라인스캔과 영역스캔 방식으로 구분되며, 향후 컴퓨터 비전의 빅데이터를 고려한다면, 라인스캔 방식의 정합된 1장의 이미지 보다는 영역스캔 카메라로 취득한 다수의 이미지가 더욱 높은 활용가치를 가질 것으로 판단된다.
5. 결 론
본 논문에서는 국내외 터널 스캐닝 장비에 대한 분석을 통해 비접촉 이동식 상태점검 장비 개발에 대한 시사점을 도출하였으며, 얻어진 결론은 다음과 같다.
1. 기존 터널 스캐닝 장비는 레이저 스캔과 이미지 스캔의 두 가지 기술로 구분된다. 향후 개발 예정인 비접촉 이동식 상태점검 장비는 80 km/h 이상의 주행속도에서 0.3 mm/pix 분해능의 이미지를 취득하여 컴퓨터 비전 알고리즘을 통해 최소 0.3 mm 균열 폭과 이에 상응하는 수준의 손상을 탐지 및 검출하는데 목적을 두고 있다. 고속 촬영과 터널 라이닝 표면의 손상 검출을 위해서는 이미지 스캐닝 장비가 더 적합할 것으로 판단하였다.
2. 이미지 스캐닝 장비는 균열, 누수 등 손상 검출을 위해 컴퓨터 비전 기법을 활용하고 있다. 유지관리에서 요구하는 손상의 검출 능력이 0.1 mm 단위의 정확도를 요구함에 따라 이미지의 품질이 매우 중요한 요소로 작용하고 있다. 이미지 데이터는 시간이력기반의 유지관리가 가능한 기초자료로서 활용성이 높아지고 있다. 이에 따라 고품질 이미지 취득을 위한 이미지 스캐닝 장비의 요구 성능도 매우 높아지고 있다. AI 기술과 함께 이미지 센서도 빠르게 발달하고 있는 상황에서 고해상도의 빠른 노출(Exposure) 성능의 카메라를 이용해 비접촉 이동식 상태점검 장비의 개발이 가능할 것으로 판단된다.
3. 터널 스캐닝 장비의 핵심적인 요소로는 카메라, 조명, 저장장치 및 전원 공급 장치로 구분할 수 있다. 각각의 장치의 동기화와 제어를 위한 시스템 구성과 차량의 주행속도와의 동기화와 제어를 고려한 장비 개발이 필요할 것으로 판단된다.
Acknowledgements
본 연구는 국토교통과학기술진흥원의 기반시설 첨단관리(Total care) 기술개발사업(RS-2022-00142566)의 지원으로 수행되었습니다. 이에 감사드립니다.
저자 기여도
이철희는 연구 설계, 데이터 수집, 원고 작성을 하였고, 김동규는 연구 개념 및 원고 검토를 하였다.
References
Alidoost, F., Austen, G., Hahn, M. (2022), "A multi-camera mobile system for tunnel inspection", Coors et al. (ed.) iCity. Transformative Research for the Livable, Intelligent, and Sustainable City, Springer, pp. 211-224.
10.1007/978-3-030-92096-8_13Amberg (2023), IMS5000 Tunnel Scanning System of AMBERG, https://ambergtechnologies.com (February 7, 2023).
Attard, L., Debono, C.J., Valentino, G., Castro, M. (2018), "Tunnel inspection using photogrammetric techniques and image processing: a review", ISPRS Journal of Photogrammetry and Remote Sensing, Vol. 144, pp. 180-188.
10.1016/j.isprsjprs.2018.07.010Bae, S.J., Jung, W., Chamrith, S., Kim, C.J., Kim, Y.M., Hong, S.H., Kim, J.G., Kim, J.Y. (2021), "Performance evaluation method of tunnel scanner for lining crack detection", Journal of the Society of Disaster Information, Vol. 17, No. 1, pp. 39-52.
10.15683/kosdi.2021.3.31.039Balaguer, C., Montero, R., Victores, J.G., Martínez, S., Jardón, A. (2014), "Towards fully automated tunnel inspection: a survey and future trends", Proceedings of the 31st ISARC, Sydney, Australia, pp. 19-33.
10.22260/ISARC2014/0005Chapman, M.A., Min, C., Zhang, D. (2016), "Continuous mapping of tunnel walls in a GNSS-denied environment", Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences - ISPRS Archives, Prague, Czech Republic, Vol. 41, pp. 481-485.
10.5194/isprsarchives-XLI-B3-481-2016Chen, H.M., Ulianov, C., Shaltout, R. (2015), "3D laser scanning technique for the inspection and monitoring of railway tunnels", Transport Problems, Vol. 10, pp. 73-84.
10.21307/tp-2015-063CNT 887 (2020), Construction New Technology, https://www.kaia.re.kr/portal/newtec/comparelist.do (February 7, 2023).
CNT 898 (2020), Construction New Technology, https://www.kaia.re.kr/portal/newtec/comparelist.do (February 7, 2023).
CNT 935 (2022), Construction New Technology, https://www.kaia.re.kr/portal/newtec/comparelist.do (February 7, 2023).
Cui, H., Ren, X., Mao, Q., Hu, Q., Wnag, W. (2019), "Shield subway tunnel deformation detection based on mobile laser scanning", Automation in Construction, Vol. 106, 102889.
10.1016/j.autcon.2019.102889Du, L., Zhong, R., Sun, H., Zhu, Q., Zhang, Z. (2018), "Study of the integration of the CNU-TS-1 mobile tunnel monitoring system", Sensors, Vol. 18, No. 2, 420.
10.3390/s1802042029389856PMC5855078Gavilán, M., Sánchez, F., Ramos, J.A., Marcos, O. (2013), "Mobile inspection system for high-resolution assessment of tunnels", Proceedings of the 6th International Conference on Structural Health Monitoring of Intelligent Infrastructure, Hong Kong, China.
Han, S.H., Cho, H.S., Kim, S.M., Jung, J.H., Heo, J. (2013), "Automated and efficient method for extraction of tunnel cross sections using terrestrial laser scanned data", Journal of Computing in Civil Engineering, Vol. 27, No. 3, pp. 274-281.
10.1061/(ASCE)CP.1943-5487.0000211Han, S.H., Cho, S.H., Kim, S.M., Heo, J., Sohn, H.G., You, K.H. (2010), "Developing a method of processing terrestrial laser scan data for efficient extraction of tunnel cross sections", Journal of Korean Tunnelling and Underground Space Association, Vol. 12, No. 3, pp. 239-245.
Hi-Rail (2023), Track Moving 3D Laser Measurement System (rMMS), http://www.hirail.cn/product_detail/id/7.html (February 7, 2023).
Huang, Z., Zhang, C.L., Fu, H.L., Ma, S.K., Fan, X.D. (2021), "Machine inspection equipment for tunnels: a review", Journal of Highway and Transportation Research and Development, Vol. 15, No. 2, pp. 40-53.
10.1061/JHTRCQ.0000774Ji, C., Sun, H., Zhong, R., Sun, M., Li, J., Lu, Y. (2023), "Deformation detection of mining tunnel based on automatic target recognition", Remote Sensing, Vol. 15, No. 2, 307.
10.3390/rs15020307Jiang, Y., Zhang, X., Taniguchi, T. (2019), "Quantitative condition inspection and assessment of tunnel lining", Automation in Construction, Vol. 102, pp. 258-269.
10.1016/j.autcon.2019.03.001Kang, Z., Tuo, L., Zlatanovab, S. (2012), "Continuously deformation monitoring of subway tunnel based on terrestrial point clouds", Proceedings of the XXII ISPRS Congress, Melbourne, Australia, Vol. XXXIX, pp. 199-203.
10.5194/isprsarchives-XXXIX-B5-199-2012Kawahara, S., Doi, H., Shirato, M., Kajifusa, N., Kutsukake, T. (2014), Investigation of the tunnel ceiling collapse in the central expressway in Japan, Proceedings of the TRB 93rd Annual Meeting, Washington D.C., TRB Paper Manuscript #14-2559.
Kim, I.S., Lee, C.H. (2018), "Development of video shooting system and technique enabling detection of micro cracks in the tunnel lining while driving", Journal of the Korean Society of Hazard Mitigation, Vol. 18, No. 5, pp. 217-229.
10.9798/KOSHAM.2018.18.5.217Kim, I.S., Lim, S.B. (2007), "A study on 3D section profiling surveying in tunnel excavation using a laser scanner", KSCE Journal of Civil and Environmental Engineering Research, Vol. 27, No. 4D, pp. 541-546.
Ko, B.S., Son, Y.K., Shin, D.I., Kim, B.H., Han, C.S. (2004), "Development of inspection system for crack on the lining of concrete tunnel", Journal of Institute of Control, Robotics and Systems, Vol. 10, No. 1, pp. 66-72.
10.5302/J.ICROS.2004.10.1.066Lee, K.H., Heo, I.W., Kim, D.H., Lee, I.M. (2011), "The construction management of tunnel using 3D laser scanner", Journal of Korean Tunnelling and Underground Space Association, Vol. 13, No. 3, pp. 159-176.
Lee, G.P., Lim, H.J., Kim, J.H. (2020), "Availability evaluation of automatic inspection equipment using line scan camera for concrete lining", Journal of Korean Tunnelling and Underground Space Association, Vol. 22, No. 6, pp. 643-653.
10.9711/KTAJ.2020.22.6.643Lee, J.O., Yun, B.Y. (2007), "Tunnel convergence and crown settlement using 3D laser scanning", Journal of Korean Society for Geospatial Information Science, Vol. 15, No. 2, pp. 67-75.
10.7319/kogsis.2017.25.2.067Lee, T.H., Park, J.T., Lee, S.H., Park, S.Z. (2022), "Performance of feature-based stitching algorithms for multiple images captured by tunnel scanning system", Journal of The Korea Institute for Structural Maintenance and Inspection, Vol. 26, No. 5, pp. 30-42.
10.11112/jksmi.2015.19.5.030Leica Geosystem (2023), SiTrack One Mobile Track Scanning System, https://www.ltrade.com.ua/product/leica-sitrackone/ (February 7, 2023).
Li, J., Wan, Y., Gao, X. (2012), "A new approach for subway tunnel deformation monitoring: high-resolution terrestrial laser scanning", Proceedings of the XXII ISPRS Congress, Melbourne, Australia, Vol. XXXIX-B5, pp. 223-228.
10.5194/isprsarchives-XXXIX-B5-223-2012Martínez-Carricondo, P., Agüera-Vega, F., Carvajal-Ramírez, F., Mesas-Carrascosa, F.J., García-Ferrer, A., Pérez-Porras, F.J. (2018), "Assessment of UAV-photogrammetric mapping accuracy based on variation of ground control points", International Journal of Applied Earth Observation and Geoinformation, Vol. 72, pp. 1-10.
10.1016/j.jag.2018.05.015Montero, R., Victores, J.G., Martínez, S., Jardón, A., Balaguer, C. (2015), "Past, present and future of robotic tunnel inspection", Automation in Construction, Vol. 59, pp. 99-112.
10.1016/j.autcon.2015.02.003NETIS (2023), New Technology Information System, https://www.netis.mlit.go.jp/netis/ (February 7, 2023).
NTSB (2006), Ceiling collapse in the interstate 90 connector tunnel, National Transportation Safety Board, Boston, Massachusetts, USA.
O'Neill, B. (2020), Terrestrial Laser Scanners (TLS): Guide and Product Selection, https://www.aniwaa.com/buyers-guide/3d-scanners/terrestrial-laser-scanners-long-range/ (February 7, 2023).
Panella, F., Roecklinger, N., Vojnovic, L., Loo, Y., Boehm, J., (2020), "Cost-benefit analysis of rail tunnel inspection for photogrammetry and laser scanning", Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences - ISPRS Archives, pp. 1137-1144.
10.5194/isprs-archives-XLIII-B2-2020-1137-2020Park, H.S. (2013), "Performance analysis of the tunnel inspection system using high speed camera", Journal of Korean Institute of Information Technology, Vol. 11, No. 4, pp. 1-6.
10.14801/kiitr.2013.11.4.1RICON (2021), Framework and implication of NETIS (New Technology Information System) in Japan, Korea Research Institute for Construction Policy, Korea.
Roh, T.H., Kim, J.S., Lee, Y.D. (2008), "Development of cross section management system in tunnel using terrestrial laser scanning data", Journal of the Korean Association of Geographic Information Studies, Vol. 11, No. 1, pp. 90-104.
Sagong, M., Moon, C.Y., Lee, J.S., Hwang, S.K., Kim, B.H. (2006), "Development of a 3D laser scanner based tunnel scanner", Journal of Korean Tunnelling and Underground Space Association, Vol. 8, No. 4, pp. 377-388.
Sagong, M., Koh, T.H., Chun, B., Lee, B., Byun, Y. (2012), "Application of the image and laser sensors based tunnel scanning system", Viggiani et al. (ed.) Geotechnical Aspects of Underground Construction in Soft Ground, Taylor & Francis Group, pp. 105-109.
Seo, D.J., Lee, J.C., Lee, Y.D., Lee, Y.H., Mun, D.Y. (2008), "Development of cross section management system in tunnel using terrestrial laser scanning technique", International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Vol. 37, No. B5, pp. 573-582.
Spacetec (2023), TS-3 Three Channels Scanner, https://www.spacetec.de/en/products/ts3/ (February 7, 2023).
Stałowska, P., Suchocki, C., Rutkowska, M. (2022), "Crack detection in building walls based on geometric and radiometric point cloud information", Automation in Construction, Vol. 134, 104065.
10.1016/j.autcon.2021.104065Sun, H., Xu, Z., Yao, L., Zhong, R., Du, L., Wu, H. (2020), "Tunnel monitoring and measuring system using mobile laser scanning: design and deployment", Remote Sensing, Vol. 12, No. 4, 730.
10.3390/rs12040730Tabrizi, K., Celaya, M., Miller, B.S., Wittwer, A., Ruzzi, L. (2017), "Damage assessment of tunnel lining by mobile laser scanning: Pittsburgh, Pennsylvania, Implementation Phase of FHWA SHRP 2 R06G Project", Transportation Research Record, Vol. 2642, No. 1, pp. 166-179.
10.3141/2642-18Ukai, M. (2007), "Advanced inspection system of tunnel wall deformation using image processing", Quarterly Report of RTRI, Vol. 48, No. 2, pp. 94-98.
10.2219/rtriqr.48.94Van Gosliga, R., Lindenbergh, R., Pfeifer, N. (2006), "Deformation analysis of a bored tunnel by means of terrestrial laser scanning", Proceedings of the International Archives of Photogrammetry, Remote Sensing and Spatial Information Systems, Dresden, Germany, Vol. XXXVI, pp. 25-27.
Wang, H., Wang, Q., Zhai, J., Yuan, D., Zhang, W., Xie, X., Zhou, B., Cai, J., Lei, Y. (2022), "Design of fast acquisition system and analysis of geometric feature for highway tunnel lining cracks based on machine vision", Applied Sciences, Vol. 12, No. 5, 2516.
10.3390/app12052516Wang, W., Zhao, W., Huang, L., Vimarlund, V., Wang, Z. (2014), "Applications of terrestrial laser scanning for tunnels: a review", Journal of Traffic and Transportation Engineering, Vol. 1, No. 5, pp. 325-337.
10.1016/S2095-7564(15)30279-8Xu, L., Gong, J., Na, J., Yang, Y., Tan, Z., Pfeifer, N., Zheng, S. (2022), "Shield tunnel convergence diameter detection based on self-driven mobile laser scanning", Remote Sensing, Vol. 14, No. 3, 767.
10.3390/rs14030767Yasuda, T., Yamamoto, H., Enomoto, M., Nitta, Y. (2020), "Smart tunnel inspection and assessment using mobile inspection vehicle, non-contact radar and AI", Proceedings of the 37th International Symposium on Automation and Robotics in Construction: From Demonstration to Practical Use To New Stage of Construction Robot, ISARC 2020, Kitakyushu, Japan, pp. 1373-1379.
10.22260/ISARC2020/0190Yasuda, T., Yamamoto, H., Shigeta, Y. (2016), "Tunnel inspection system by using high-speed mobile 3D survey vehicle: MIMM-R", Journal of Robotics Society of Japan, Vol. 34, No. 9, pp. 589-590.
10.7210/jrsj.34.589Yoon, J.S., Sagong, M., Lee, J.S., Lee, K.S. (2007), "A detection algorithm for the installations and damages on a tunnel liner using the laser scanning data", Journal of Korean Tunnelling and Underground Space Association, Vol. 9, No. 1, pp. 19-28.
Yoon, J.S., Sagong, M., Lee, J.S., Lee, K.S. (2009), "Feature extraction of a concrete tunnel liner from 3D laser scanning data", NDT & E International, Vol. 42, No. 2, pp. 97-105.
10.1016/j.ndteint.2008.10.001Yoon, T.G., Lee, S. (2008), "A study for tunnel management system development using a tunnel scanner", Journal of the Korea Institute for Structural Maintenance and Inspection, Vol. 12, No. 3, pp. 183-190.
Yu, S.N., Jang, J.H., Han, C.S. (2007), "Auto inspection system using a mobile robot for detecting concrete cracks in a tunnel", Automation in Construction, Vol. 16, No. 3, pp. 255-261.
10.1016/j.autcon.2006.05.003Zhan, D., Yu, L., Xiao, J., Chen, T. (2015), "Multi camera and structured light vision system (MSVS) for dynamic high accuracy 3D measurements of railway tunnels", Sensors, Vol. 15, No. 4, pp. 8664-8684.
10.3390/s15040866425875190PMC4431261